
Navrhujte, vyvíjejte a iterujte na svém projektu – založené na blocích
Při navrhování projektu odpovězte na následující otázky ve svém technickém notebooku.
-
Co chcete, aby projekt s robotem udělal? Vysvětli podrobnosti.
-
Jakými kroky budete projekt testovat? Vysvětli podrobnosti.
-
Jak lze robota naprogramovat tak, aby úkol dokončil co nejpřesněji? Vysvětli podrobnosti.
![]() Sada nástrojů pro učitele
-
odpovědí
Sada nástrojů pro učitele
-
odpovědí
-
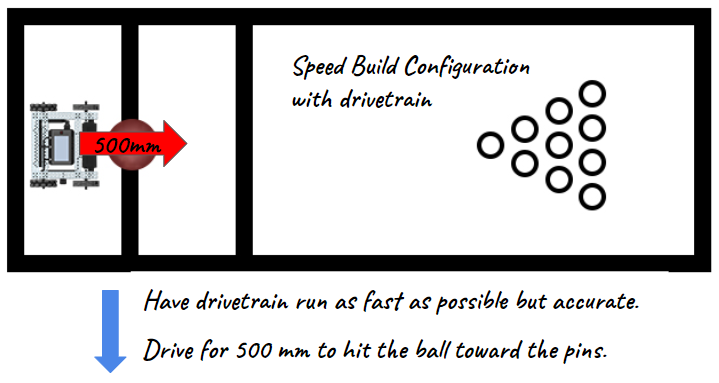
Mezi odpovědi bude pravděpodobně patřit rychlá jízda dostatečně daleko, aby bylo možné dosáhnout a tlačit míč dopředu s optimální silou a zároveň zachovat přesnost. Požádejte studenty, aby vysvětlili, jak se srážky robota s míčem a míče s kuželkami projevily v jejich plánech. Spojte to s druhým Newtonovým zákonem a studenti pravděpodobně budou chtít nastavit robota tak, aby jel 100% rychlostí. Je však třeba zdůraznit, že ačkoliv nejvyšší rychlost robota by vedla k největšímu zrychlení míče a následně i kuželek po srážce, nejvyšší rychlost robota by mohla ohrozit přesnost v této výzvě. Budou muset najít kompromis mezi těmito dvěma možnostmi a k shromáždění dat a určení nejlepší rychlosti pro tuto výzvu mohou použít novou tabulku níže nebo své předchozí tabulky.
-
Odpovědi by měly zahrnovat napsání pseudokódu, změření vzdálenosti, kterou robot musí urazit, převod této naměřené hodnoty na milimetry a spuštění projektu. Ujistěte se, že studenti chápou, jak převádět centimetry nebo metry na milimetry pro účely programování.
-
Převod centimetrů na milimetry vyžaduje přidání nuly na konec celého čísla. Například 10 cm se rovná 100 mm.
-
Převod metrů na milimetry vyžaduje přidání tří nul na konec celého čísla. Například 1 m se rovná 1000 mm.
-
-
Mezi odpovědi by mohlo patřit změření přesné vzdálenosti od počáteční polohy robota k počáteční poloze míče a použití tohoto měření k naprogramování přesné vzdálenosti, kterou robot musí urazit. Důležité je také najít optimální rychlost pro jízdu a zároveň zachovat přesnost.
Při vytváření projektu postupujte podle následujících kroků:
- Naplánujte cestu, kterou chcete robota naprogramovat, pomocí výkresů a pseudokódu (Google / .docx / .pdf).
- K vytvoření projektu použijte pseudokód, který jste vytvořili.
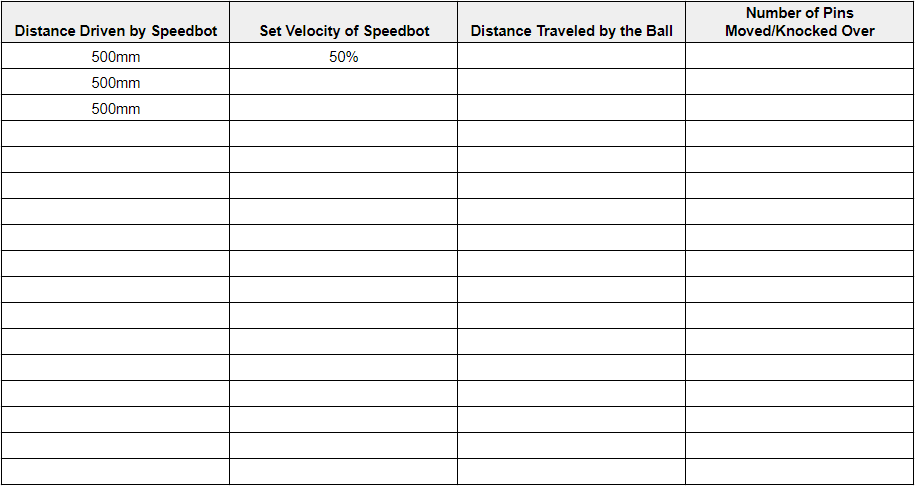
- Často testujte svůj projekta iterujte na něm s využitím toho, co jste se z testování naučili. Po každé zkoušce zaznamenejte, jak daleko robot ujel, na jakou rychlost byl nastaven, jak daleko míč ujel a kolik kolíků se pohnulo. Zde je aktualizovaná tabulka pro sběr a analýzu dat.
- Použijte pseudokód, který jste vytvořili pro vývoj vašeho projektu ve VEXcode V5.
- Otestujte svůj projekt často a opakujte jej pomocí toho, co jste se z testování naučili. Po každé zkoušce zaznamenejte, jak daleko robot ujel, na jakou rychlost byl nastaven, jak daleko míč ujel a kolik kolíků se pohnulo. Zde je aktualizovaná tabulka pro sběr a analýzu dat.
![]() Tipy pro učitele
Tipy pro učitele
- Tabulku pro Strike Challenge si můžete stáhnout a vytisknout zde (Google / .pdf), nebo si ji studenti mohou znovu vytvořit ve svých technických sešitech.
-
Požádejte studenty, aby pomocí pravítka změřili svou navrhovanou cestu. Poté nechte studenty vyhodnotit svůj pseudokód, než přejdou k druhému kroku.
-
Poučte studenty, aby ve svém projektu používali pseudokód jako komentáře, což jim pomůže s organizací, plynulostí a řešením problémů. Požádejte studenty, aby před přidáním instrukcí do svých projektů vyhodnotili svůj pseudokód. Rubriku s pseudokódem si můžete stáhnout zde (Google / .docx / .pdf).

- V průběhu testovací fáze si projděte datové tabulky studentů a požádejte skupiny, aby vysvětlily, jak zvolily nejlepší rychlost pro danou výzvu. Dvě hlavní proměnné, na které by se měli zaměřit, jsou rychlost robota a počet posunutých kuželek, ale je možné zvážit i přibližnou uraženou vzdálenost míčku. Opět doporučujeme testování, které manipuluje pouze s jednou proměnnou najednou: rychlostí robota.
Pokud máte potíže se začátkem a pracujete s bloky, přečtěte si jeden z následujících návodů ve VEXcode V5 :
-
Pohyby hnacího ústrojí
-
Začínáme
-
Stáhnout a spustit projekt
-
Přesouvání a odstraňování bloků
-
Pojmenování a ukládání projektů
-
Použití příkladů a šablon