
Responda las siguientes preguntas en su cuaderno de ingeniería mientras diseña su proyecto.
-
¿Qué quieres que haga el proyecto con el robot? Explique con detalles.
-
¿Qué pasos seguirás para probar el proyecto? Explique con detalles.
-
¿Cómo se puede programar su robot para completar la tarea con la mayor precisión? Explique con detalles.
![]() Caja de herramientas para profesores
-
Respuestas
Caja de herramientas para profesores
-
Respuestas
-
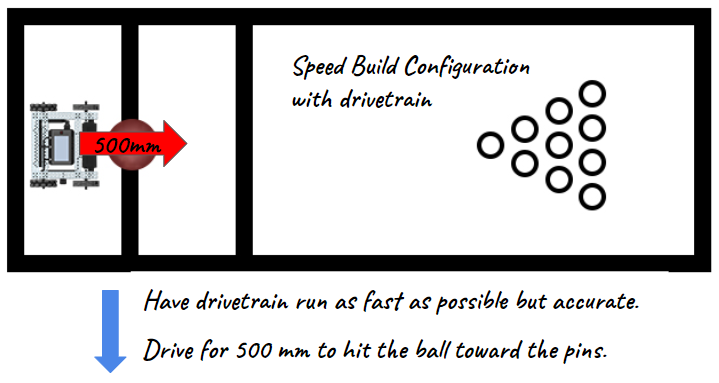
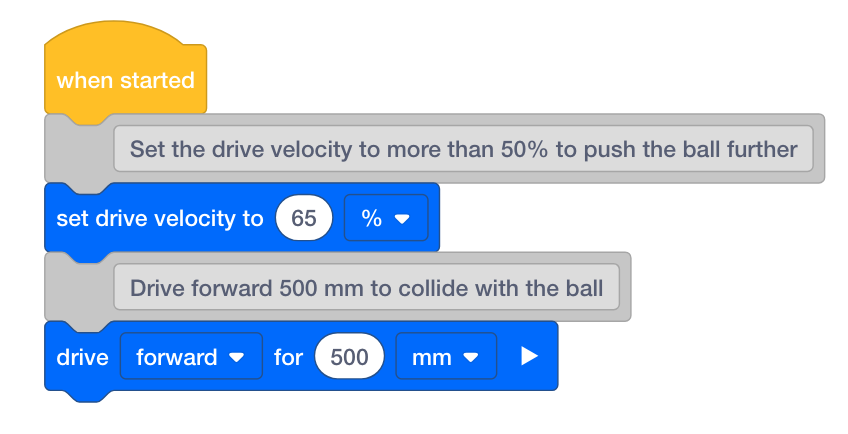
Las respuestas probablemente incluirán conducir lo suficientemente rápido y lo suficientemente lejos como para alcanzar y empujar la pelota hacia adelante con una fuerza óptima manteniendo la precisión. Pida a los estudiantes que expliquen cómo las colisiones del robot con la pelota y de la pelota con los bolos influyeron en sus planes. Conecte esto con la Segunda Ley de Newton y los estudiantes probablemente querrán configurar el robot para que se conduzca al 100% de velocidad. Pero resalte que aunque la velocidad más alta del robot conduciría a la mayor aceleración de la bola y posteriormente de los bolos después de la colisión, la velocidad más alta del robot podría poner en peligro la precisión en este desafío. Tendrán que encontrar un compromiso entre los dos y pueden usar la nueva tabla a continuación o sus tablas anteriores para recopilar datos y decidir la mejor velocidad para este desafío.
-
Las respuestas deben incluir escribir pseudocódigo, medir la distancia que debe recorrer el robot, convertir esa medida a milímetros y ejecutar el proyecto. Asegúrese de que los estudiantes comprendan cómo convertir centímetros o metros a milímetros para programar.
-
Para convertir centímetros a milímetros es necesario sumar un cero al final del número entero. Por ejemplo, 10 cm son iguales a 100 mm.
-
Para convertir metros a milímetros es necesario sumar tres ceros al final del número entero. Por ejemplo, 1 m es igual a 1000 mm.
-
-
Las respuestas podrían incluir medir la distancia exacta desde la ubicación inicial del robot hasta la posición inicial de la pelota y usar esa medida para programar la distancia precisa que debe recorrer el robot. Además, es importante encontrar la velocidad óptima para conducir manteniendo la precisión.
Siga los pasos a continuación mientras crea su proyecto:
-
Planifique la ruta que desea programar para que siga su robot utilizando dibujos y pseudocódigo (Google ).
-
Utilice el pseudocódigo que creó para desarrollar su proyecto.
-
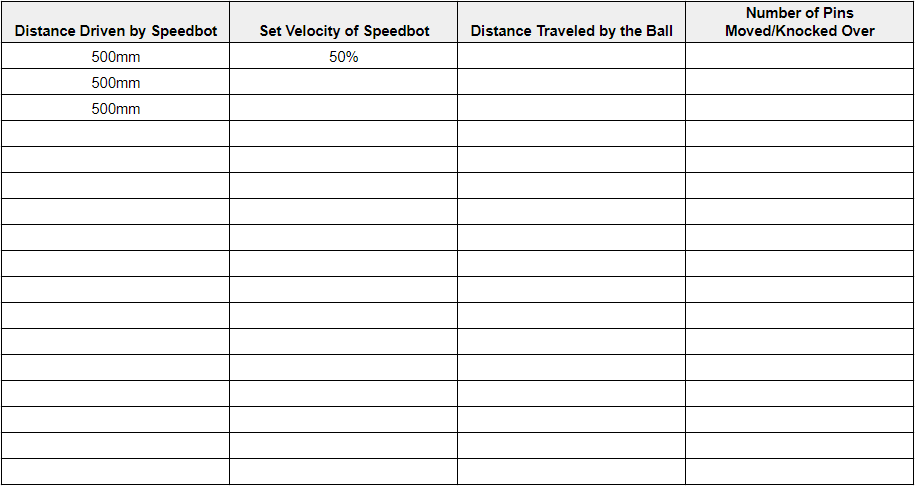
Pruebe su proyecto con frecuencia y repítalo utilizando lo que aprendió de sus pruebas. Después de cada prueba, registre qué tan lejos condujo el robot, cuál fue la velocidad establecida, qué distancia viajó la bola y cuántos bolos se movieron. Aquí hay una tabla actualizada para la recopilación y análisis de datos.
-
Utilice el pseudocódigo que creó para desarrollar su proyecto en VEXcode V5.
-
Pruebe su proyecto con frecuencia y repítalo utilizando lo que aprendió de sus pruebas. Después de cada prueba, registre qué tan lejos condujo el robot, cuál fue la velocidad establecida, qué distancia viajó la bola y cuántos bolos se movieron. Aquí hay una tabla actualizada para la recopilación y análisis de datos.
![]() Consejos para profesores
Consejos para profesores
-
La tabla para el Strike Challenge se puede descargar e imprimir desde aquí (Google / .pdf), o los estudiantes pueden recrear la tabla en sus cuadernos de ingeniería.
-
Pida a los estudiantes que usen una regla para medir el camino propuesto. Luego, haga que los estudiantes evalúen su pseudocódigo antes de pasar al segundo paso.
-
Indique a los estudiantes que utilicen pseudocódigo como comentarios en su proyecto para ayudar con la organización, el flujo y la resolución de problemas. Pida a los estudiantes que evalúen su pseudocódigo antes de agregar instrucciones a sus proyectos. Puede descargar una rúbrica de pseudocódigo aquí (Google / .docx / .pdf).
-
A medida que continúa la fase de prueba, revise las tablas de datos de los estudiantes y pida a los grupos que expliquen cómo eligieron la mejor velocidad para el desafío. Las dos variables principales en las que deben centrarse son la velocidad del robot y el número de bolos movidos, pero también se puede considerar la distancia aproximada recorrida por la bola. Nuevamente, fomente las pruebas que manipulen solo una variable a la vez: la velocidad del robot.
Si tiene problemas para comenzar y está trabajando con bloques, revise uno de los siguientes tutoriales en VEXcode V5:
-
Movimientos de la transmisión
-
Empezando
-
Descargar y ejecutar un proyecto
-
Mover y quitar bloques
-
Nombrar y guardar proyectos
-
Usar ejemplos y plantillas