
Beantworten Sie beim Entwurf Ihres Projekts die folgenden Fragen in Ihrem technischen Notizbuch.
-
Welche Aufgabe soll der Roboter im Rahmen des Projekts erfüllen? Erklären Sie es ausführlich.
-
Welche Schritte werden Sie befolgen, um das Projekt zu testen? Erklären Sie es ausführlich.
-
Wie kann Ihr Roboter so programmiert werden, dass er die Aufgabe mit höchster Genauigkeit erledigt? Erklären Sie es ausführlich.
![]() Lehrer-Toolbox
-
Antworten
Lehrer-Toolbox
-
Antworten
-
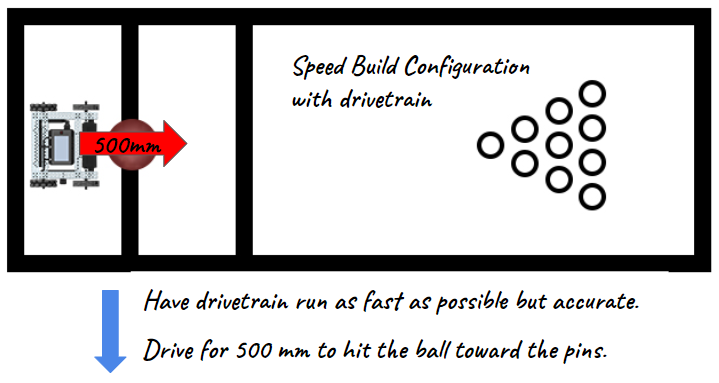
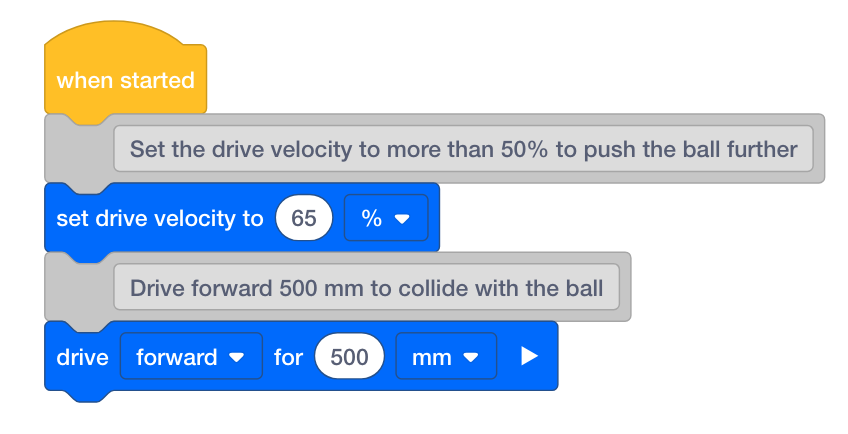
Die Antworten werden wahrscheinlich beinhalten, schnell und weit genug zu fahren, um den Ball mit optimaler Kraft zu erreichen und nach vorne zu treiben, ohne dabei die Genauigkeit zu verlieren. Bitten Sie die Schüler zu erklären, welchen Einfluss die Kollisionen des Roboters mit dem Ball und des Balls mit den Kegeln auf ihre Pläne hatten. Wenn man dies mit Newtons zweitem Gesetz in Verbindung bringt, werden die Schüler den Roboter wahrscheinlich so einstellen wollen, dass er mit 100 % Geschwindigkeit fährt. Betonen Sie jedoch, dass die höchste Geschwindigkeit des Roboters zwar zur größten Beschleunigung des Balls und anschließend der Kegel nach der Kollision führen würde, die höchste Geschwindigkeit des Roboters jedoch die Genauigkeit bei dieser Herausforderung gefährden könnte. Sie müssen einen Kompromiss zwischen beiden finden und können die neue Tabelle unten oder ihre vorherigen Tabellen verwenden, um Daten zu sammeln und die beste Geschwindigkeit für diese Herausforderung zu bestimmen.
-
Die Antworten sollten das Schreiben von Pseudocode, das Messen der vom Roboter zurückzulegenden Distanz, das Umrechnen dieser Messung in Millimeter und das Ausführen des Projekts umfassen. Stellen Sie sicher, dass die Schüler verstehen, wie Zentimeter oder Meter für die Programmierung in Millimeter umgerechnet werden.
-
Um Zentimeter in Millimeter umzurechnen, muss an das Ende der ganzen Zahl eine Null angehängt werden. Beispielsweise entsprechen 10 cm 100 mm.
-
Um Meter in Millimeter umzurechnen, müssen an das Ende der ganzen Zahl drei Nullen angehängt werden. Beispielsweise entspricht 1 m 1000 mm.
-
-
Mögliche Antworten sind beispielsweise die Messung der exakten Distanz zwischen der Startposition des Roboters und der Startposition des Balls sowie die Verwendung dieser Messung zum Programmieren der genauen Distanz, die der Roboter zurücklegen muss. Darüber hinaus ist es wichtig, die optimale Fahrgeschwindigkeit zu finden und gleichzeitig die Genauigkeit beizubehalten.
Befolgen Sie beim Erstellen Ihres Projekts die folgenden Schritte:
-
Planen Sie mithilfe von Zeichnungen und Pseudocode (Google / .docx / .pdf) den Pfad, dem Ihr Roboter folgen soll.
-
Verwenden Sie den von Ihnen erstellten Pseudocode, um Ihr Projekt zu entwickeln.
-
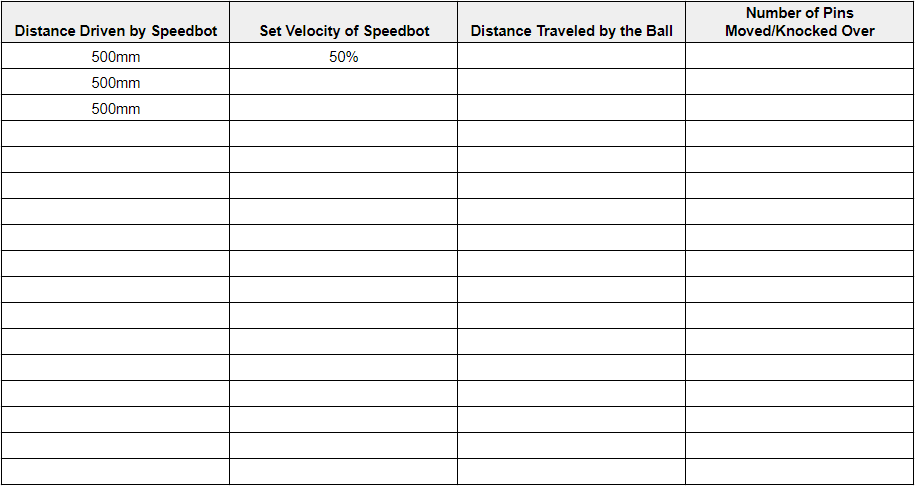
Testen Sie Ihr Projekt häufig und iterieren Sie es anhand Ihrer Testerkenntnisse. Notieren Sie nach jedem Versuch, wie weit der Roboter gefahren ist, welche Geschwindigkeit eingestellt war, wie weit der Ball ungefähr geflogen ist und wie viele Kegel bewegt wurden. Hier ist eine aktualisierte Tabelle zur Datenerfassung und -analyse.
-
Verwenden Sie den von Ihnen erstellten Pseudocode, um Ihr Projekt in VEXcode V5 zu entwickeln.
-
Testen Sie Ihr Projekt häufig und iterieren Sie es anhand Ihrer Testerkenntnisse. Notieren Sie nach jedem Versuch, wie weit der Roboter gefahren ist, welche Geschwindigkeit eingestellt war, wie weit der Ball ungefähr geflogen ist und wie viele Kegel bewegt wurden. Hier ist eine aktualisierte Tabelle zur Datenerfassung und -analyse.
![]() Tipps für Lehrer
Tipps für Lehrer
-
Die Tabelle für die Strike Challenge kann hier heruntergeladen und ausgedruckt werden (Google / .pdf), oder die Schüler können die Tabelle in ihren technischen Notizbüchern neu erstellen.
-
Bitten Sie die Schüler, ihren geplanten Weg mit einem Lineal zu messen. Lassen Sie die Schüler dann ihren Pseudocode auswerten, bevor Sie mit dem zweiten Schritt fortfahren.
-
Weisen Sie die Schüler an, in ihrem Projekt Pseudocode als Kommentare zu verwenden, um die Organisation, den Ablauf und die Fehlerbehebung zu erleichtern. Bitten Sie die Schüler, ihren Pseudocode zu bewerten, bevor sie ihren Projekten Anweisungen hinzufügen. Sie können hier eine Pseudocode-Rubrik herunterladen (Google / .docx / .pdf).
-
Gehen Sie im weiteren Verlauf der Testphase die Datentabellen der Schüler durch und bitten Sie die Gruppen zu erklären, wie sie die beste Geschwindigkeit für die Herausforderung gewählt haben. Die beiden Hauptvariablen, auf die sie sich konzentrieren sollten, sind die Geschwindigkeit des Roboters und die Anzahl der bewegten Kegel, aber auch die ungefähre zurückgelegte Distanz des Balls kann berücksichtigt werden. Ermutigen Sie erneut zu Tests, bei denen jeweils nur eine Variable manipuliert wird: die Geschwindigkeit des Roboters.
Wenn Sie beim Einstieg Schwierigkeiten haben und mit Blöcken arbeiten, sehen Sie sich eines der folgenden Tutorials in VEXcode V5 an:
-
Antriebsbewegungen
-
Erste Schritte
-
Herunterladen und Ausführen eines Projekts
-
Verschieben und Entfernen von Blöcken
-
Projekte benennen und speichern
-
Beispiele und Vorlagen verwenden