
Projenizi Tasarlayın, Geliştirin ve Yineleyin - Blok Tabanlı
Projenizi tasarlarken mühendislik defterinizdeki aşağıdaki soruları yanıtlayın.
-
Projenin robota ne yaptırmasını istiyorsunuz? Ayrıntılarıyla açıklayın.
-
Projeyi test etmek için hangi adımları izleyeceksiniz? Ayrıntılarıyla açıklayın.
-
Robotunuz görevi en doğru şekilde tamamlayacak şekilde nasıl programlanabilir? Ayrıntılarıyla açıklayın.
![]() Öğretmen Araç Kutusu
-
Cevap
Öğretmen Araç Kutusu
-
Cevap
-
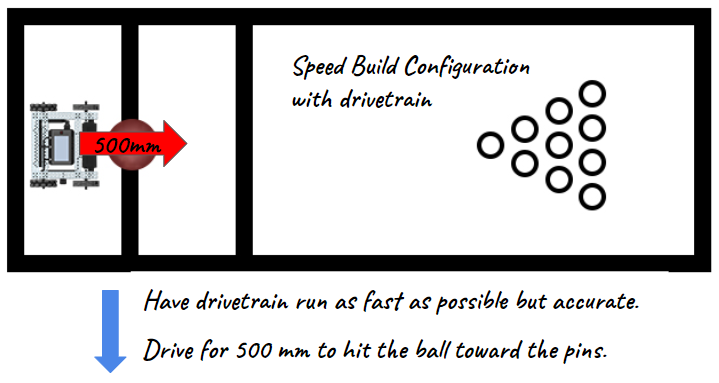
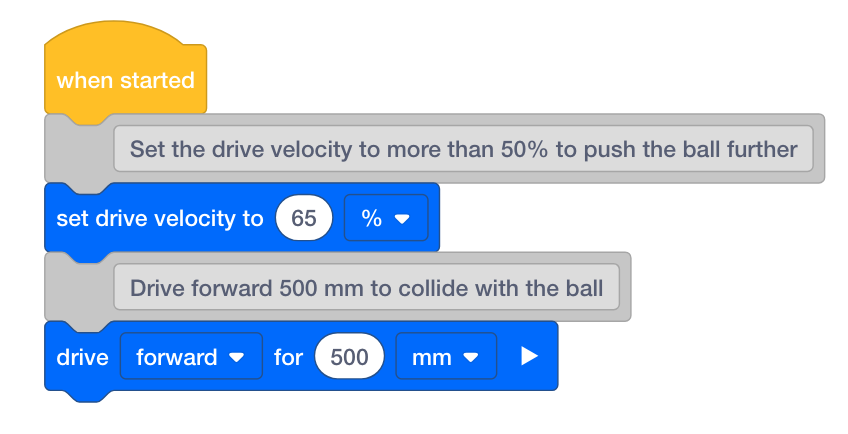
Cevaplar muhtemelen, isabetliliği koruyarak topu en iyi güçle ileri itmek için yeterince hızlı ve uzağa sürmek olacaktır. Öğrencilerden robotun topla ve topun pimlerle çarpışmasının planlarına nasıl etki ettiğini açıklamalarını isteyin. Bunu Newton'un İkinci Yasası'na bağlarsanız, öğrenciler büyük ihtimalle robotu %100 hızda hareket edecek şekilde ayarlamak isteyeceklerdir. Ancak şunu vurgulamak gerekir ki, robot için en yüksek hız, topun ve dolayısıyla çarpışmadan sonra pimlerin en büyük ivmesine yol açacak olsa da, robot için en yüksek hız bu mücadelede doğruluğu tehlikeye atabilir. İkisi arasında bir orta yol bulmaları gerekecek ve veri toplamak ve bu zorluk için en iyi hızı belirlemek için aşağıdaki yeni tabloyu veya önceki tablolarını kullanabilirler.
-
Cevaplar arasında sözde kod yazmak, robotun kat etmesi gereken mesafeyi ölçmek, bu ölçümü milimetreye çevirmek ve projeyi çalıştırmak yer almalıdır. Öğrencilerin programlama için santimetre veya metreyi milimetreye nasıl dönüştüreceklerini anladıklarından emin olun.
-
Santimetreyi milimetreye çevirmek için tam sayının sonuna bir sıfır eklemek gerekir. Örneğin 10cm 100mm'ye eşittir.
-
Metreyi milimetreye çevirmek için tam sayının sonuna üç sıfır eklemek gerekir. Örneğin 1m 1000mm'ye eşittir.
-
-
Cevaplar arasında robotun başlangıç noktasının topun başlangıç noktasına olan tam mesafesinin ölçülmesi ve bu ölçümün robotun kat etmesi gereken kesin mesafeyi programlamak için kullanılması yer alabilir. Ayrıca sürüş sırasında hassasiyeti koruyarak optimum hızı bulmak da önemlidir.
Projenizi oluştururken aşağıdaki adımları izleyin:
- Çizimleri ve sözde kodlamayı (Google /.docx /.pdf) kullanarak robotunuzu takip edecek şekilde programlamak istediğiniz yolu planlayın.
- Projenizi geliştirmek için oluşturduğunuz sözde kodu kullanın.
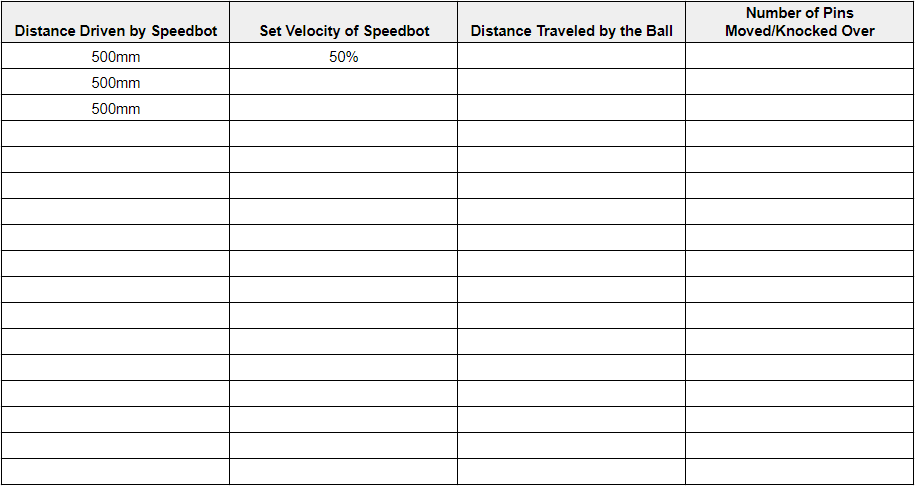
- Projenizisık test edin ve testlerinizden öğrendiklerinizi kullanarak üzerinde yinelemeler yapın. Her denemeden sonra, robotun ne kadar sürdüğünü, hızın ne olarak ayarlandığını, topun ne kadar uzağa gittiğini ve kaç iğnenin hareket ettirildiğini kaydedin. İşte veri toplama ve analiz için güncellenmiş bir tablo.
- VEXcode V5 'te projenizi geliştirmek için oluşturduğunuz sözde kodu kullanın.
- Projenizi sık sık test edin ve testlerinizden öğrendiklerinizi kullanarak üzerinde yineleyin. Her denemeden sonra, robotun ne kadar sürdüğünü, hızın ne olarak ayarlandığını, topun ne kadar uzağa gittiğini ve kaç iğnenin hareket ettirildiğini kaydedin. İşte veri toplama ve analiz için güncellenmiş bir tablo.
![]() Öğretmen İpuçları
Öğretmen İpuçları
- Strike Challenge tablosunu buradan (Google / .pdf) indirip yazdırabilirsiniz veya öğrenciler tabloyu mühendislik defterlerinde yeniden oluşturabilirler.
-
Öğrencilerden önerdikleri yolu bir cetvel kullanarak ölçmelerini isteyin. Daha sonra, ikinci adıma geçmeden önce öğrencilerin sözde kodlarını değerlendirmelerini sağlayın.
-
Öğrencilere projelerinde organizasyon, akış ve sorun gidermeye yardımcı olması için sözde kodu yorum olarak kullanmaları talimatını verin. Öğrencilerden projelerine talimat eklemeden önce sözde kodlarını değerlendirmelerini isteyin. Burada bir sözde kod değerlendirme ölçütü indirebilirsiniz (Google / .docx / .pdf).
- Test aşaması devam ederken öğrencilerin veri tablolarını inceleyin ve gruplardan bu zorluk için en iyi hızı nasıl seçtiklerini açıklamalarını isteyin. Odaklanmaları gereken iki ana değişken robotun hızı ve hareket ettirilen pin sayısıdır ancak topun yaklaşık kat ettiği mesafe de dikkate alınabilir. Tekrar ediyorum, bir seferde yalnızca bir değişkeni, yani robotun hızını etkileyen testleri teşvik edin.
Başlarken sorun yaşıyorsanız ve Bloklarla çalışıyorsanız VEXcode V5 'teki aşağıdaki Eğitimlerden birini inceleyin:
-
Aktarma Organları Hareketleri
-
Başlarken
-
Bir Projeyi İndirin ve Çalıştırın
-
Blokların Taşınması ve Kaldırılması
-
Adlandırma ve Kaydetme Projeleri
-
Örnekleri ve Şablonları Kullanma