
Připravte se na výzvu Vision Data Challenge – založenou na blocích
![]() Sada nástrojů
této aktivity
Sada nástrojů
této aktivity
Vizuální senzor poskytuje řadu dat, která lze následně využít v projektech. Bloky Sensing umožňují uživateli pořizovat snímky projektu, rozhodnout, zda objekt existuje, kolik jich existuje, určit souřadnice středu objektu X a Y v rámci snímku z vizuální sondy a určit šířku a výšku objektu v pixelech v rámci snímku. Tato aktivita představí všechny související bloky nezbytné pro shromažďování těchto informací v rámci přípravy na soutěž Vision Data Challenge.
Následuje nástin soutěže Vision Data Challenge organizace Rethink:
-
Prohlédněte si kompletní sadu dat shromážděných ze snímacích bloků kamerového senzoru.
-
Doplňte částečnou datovou sadu informací shromážděných ze senzoru Vision Sensor o jiném snímku.
-
Vytvořte datovou sadu na základě snímku a snímacích bloků kamerového senzoru.
Snímací bloky kamerového senzoru
VEXcode V5 má snímací bloky pro Vision Sensor. První dva jste již použili v sekci Přehrát k pořízení snímku a ke kontrole, zda objekt existuje.
Na obrázku níže vidíte, že bloksnapshotzachytil snímek GREENBOXu. Objekt GREENBOX byl ve snímku identifikován, takže odpověď na otázku, zda existuje, je TRUE.
Podívejme se na tyto další bloky Sensing a na to, co nám říkají jejich hodnoty.
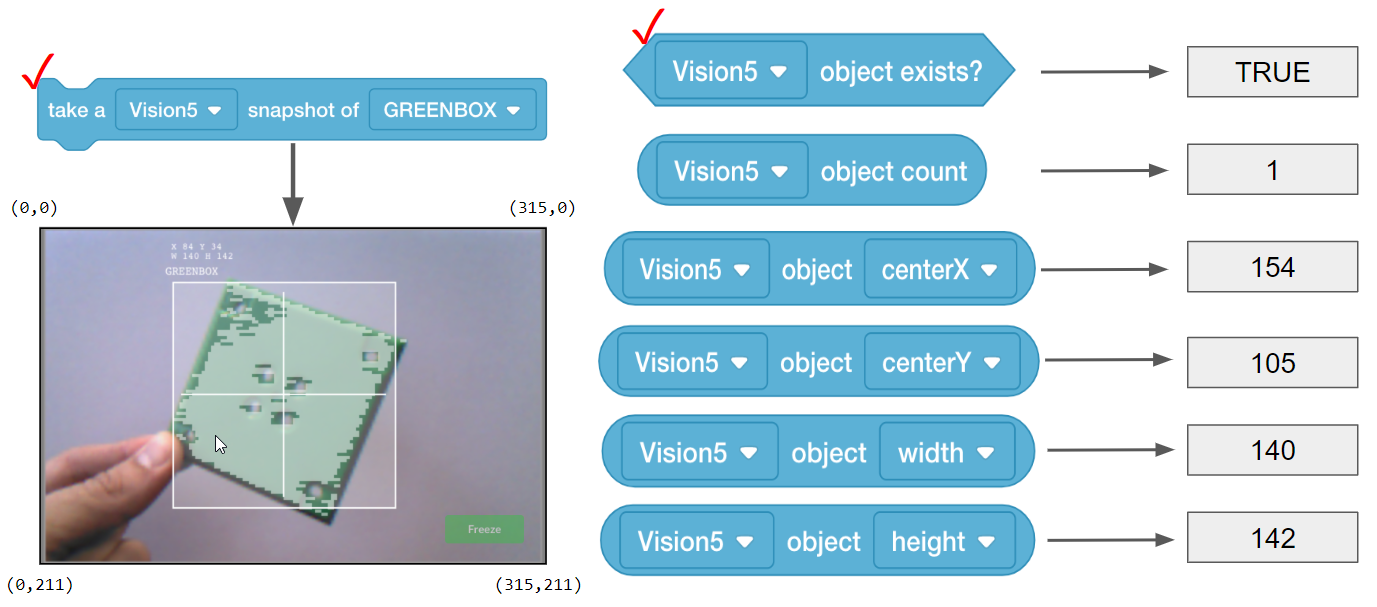
- Blokobject countnám říká, kolik objektů GREENBOX se ve snímku nachází. Zde je detekován pouze 1.
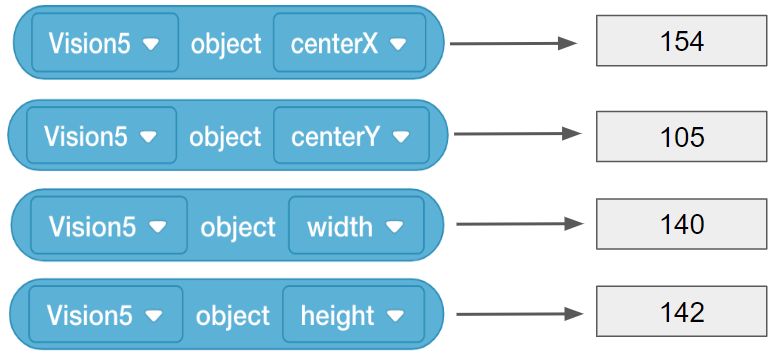
- Hodnota X uprostřed nám říká, zda je objekt GREENBOX vlevo nebo vpravo od středového bodu robota. Nezapomeňte, že kamerový senzor by měl být namontován uprostřed robota směrem dopředu, takže pohled snímku je pohledem robota.
- Pokud je střed X větší než 157,5, objekt je napravo od středového bodu robota.
- Pokud je střed X menší než 157,5, objekt je nalevo od středového bodu robota.
- Hodnota středu Y nám říká, zda je GREENBOX vyšší nebo nižší než středový bod robota.
- Pokud je střed Y větší než 105,5, je předmět nižší než středový bod robota.
- Pokud je střed Y menší než 105,5, je objekt vyšší než středový bod robota.
- Hodnoty šířky a výšky nám říkají, jak blízko je GREENBOX k robotu.
- Stejný objekt bude mít větší šířku a výšku, jakmile se přiblíží k robotu.
![]() Sada nástrojů
učitele
Proč toto čtení?
Sada nástrojů
učitele
Proč toto čtení?
Informace o blocích v nápovědě k VEXcode V5 také poskytují informace, ale zde jsou shromažďovaná data zasazena do kontextu, co konkrétně uživateli říkají o objektu ve snímku.
Poznámky:
-
Hodnoty centerX a centerY celého snímku se používají k určení, zda se objekt nachází vlevo/vpravo nebo nad/pod středovým bodem robota. Vypočítají se vydělením celkového počtu pixelů na dané ose dvěma (např. střed X snímku = 315 / 2 = 157,5).
Můžeme předpokládat, že středový bod robota je stejný jako středový bod snímku z vizuální senzoru, protože vizuální senzor by měl být namontován uprostřed robota a směřovat dopředu. Při posuzování polohy objektu vzhledem ke středovému bodu robota (nebo vizuálního senzoru) je třeba vzít v úvahu polohu vizuální senzoru na konstrukci robota a míru, do jaké může být vizuální senzor nakloněn dolů.
-
Hodnoty Y se v rámci snímku zvyšují směrem dolů. Ujistěte se, že si to studenti uvědomují, než přejdou k další části.
Jak se vypočítávají hodnoty středu X a středu Y?
Hodnoty jsou vypočteny na základě souřadnic v rámci snímku. Šířka a výška objektu jsou již vypočítány.
Kamerový senzor sleduje hodnoty X a Y levého horního rohu objektu. Níže jsou tyto souřadnice (84, 34).
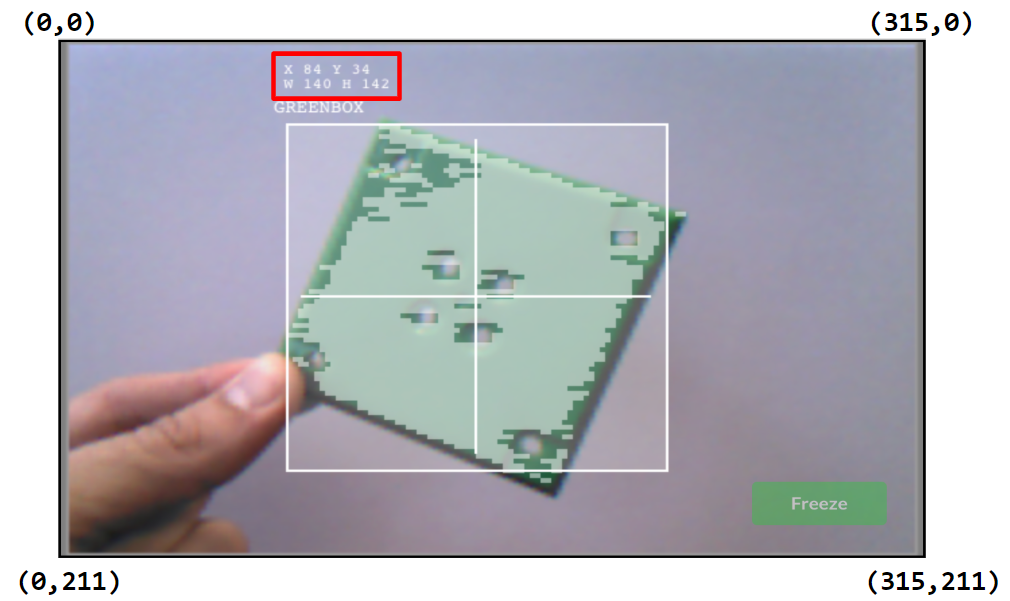
Hodnoty středu X a středu Y lze vypočítat na základě souřadnic levého horního rohu (84, 34) a poskytnutých hodnot šířky (W 140) a výšky (H 142).
- středX = 140/2 + 84 =154
- centerX = polovina šířky objektu přidaného k jeho souřadnici X zcela vlevo
- střed Y = 142/2 + 34 =
- centerY = polovina výšky objektu přidaná k jeho nejvyšší souřadnici Y
![]() Sada nástrojů pro učitele
Závěrečná
této stránky
Sada nástrojů pro učitele
Závěrečná
této stránky
Ujistěte se, že studenti rozumí matematickým výpočtům spojeným s nalezením hodnot středu X a středu Y. Budou to potřebovat pro aktivitu na další straně.
Zeptejte se, jak se hodnoty (84, 34) a (W 140, H 142) vztahují k souřadnicím uvedeným v rozích snímku. Studenti by si měli uvědomit, že celý snímek je mapován na souřadnicovou rovinu na základě počtu pixelů. Hodnoty X se pohybují v rozsahu od 0 do 315 (316 pixelů na šířku) a hodnoty Y se pohybují v rozsahu od 0 do 211 (212 pixelů na výšku). Souřadnice a velikost objektu jsou založeny na tom, kolik pixelů objekt zabírá podél těchto os.