
Prepárese para el desafío de datos de visión: basado en bloques
![]() Caja de herramientas para maestros
: el propósito de esta actividad
Caja de herramientas para maestros
: el propósito de esta actividad
El sensor de visión proporciona una variedad de datos que luego se pueden utilizar en proyectos. Los bloques de detección permiten al usuario hacer que el proyecto tome instantáneas, decida si el objeto existe, decida cuántos existen, determine las coordenadas X e Y del centro del objeto dentro de la instantánea del sensor de visión y determine el ancho y la altura del objeto en píxeles dentro de la instantánea. Esta actividad presentará todos los bloques relacionados necesarios para recopilar esa información en preparación para el Desafío de datos de visión.
El siguiente es un resumen del desafío de datos de visión de Rethink:
-
Revise un conjunto completo de datos de información recopilada de los bloques de detección del sensor de visión.
-
Complete un conjunto de datos parciales de información recopilada del sensor de visión sobre una instantánea diferente.
-
Cree un conjunto de datos basado en una instantánea y los bloques de detección del sensor de visión.
Bloques de detección del sensor de visión
VEXcode V5 tiene bloques de detección para el sensor de visión. Las dos primeras que ya utilizaste en la sección Reproducir para tomar una instantánea y comprobar si el objeto existe.
En la siguiente figura, puede ver que el bloque de instantáneas capturó la instantánea de GREENBOX. El objeto, GREENBOX, se identificó en la instantánea y, por lo tanto, la respuesta de si existe es VERDADERA.
Veamos estos otros bloques de detección y lo que nos dicen sus valores.
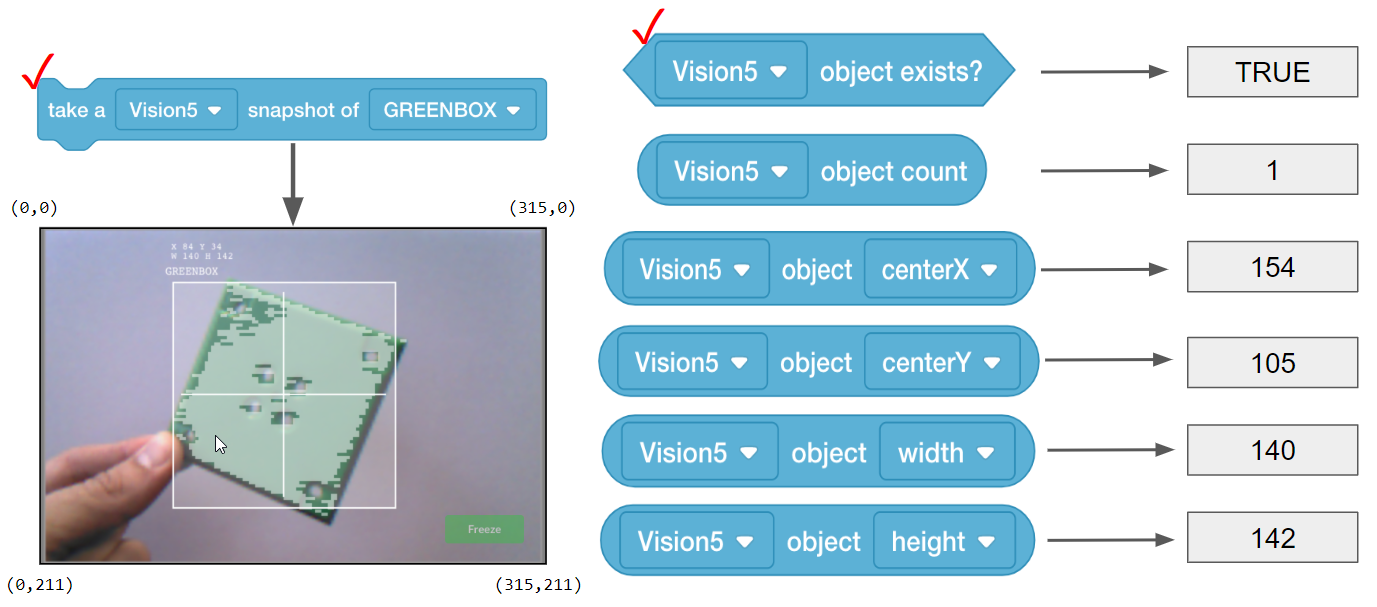
- El bloque de recuento de objetos nos dice cuántos objetos GREENBOX hay en la instantánea. Aquí, solo se detecta 1.
- El valor de la X central nos indica si el objeto GREENBOX está a la izquierda o a la derecha del punto central del robot. Recuerde, el sensor de visión debe montarse en el centro del robot mirando hacia adelante, por lo que la vista de la instantánea es la vista del robot.
- Si el centro X es mayor que 157.5, el objeto está a la derecha del punto central del robot.
- Si el centro X es inferior a 157,5, el objeto está a la izquierda del punto central del robot.
- El valor central Y nos indica si el GREENBOX es más alto o más bajo que el punto central del robot.
- Si el centro Y es mayor que 105.5, el objeto está más bajo que el punto central del robot.
- Si el centro Y es inferior a 105,5, el objeto está más alto que el punto central del robot.
- Los valores de ancho y alto nos dicen qué tan cerca está el GREENBOX del robot.
- El objeto del mismo tamaño será más grande en ancho y alto a medida que se acerque al robot.
![]() Teacher Toolbox
-
¿Por qué esta lectura?
Teacher Toolbox
-
¿Por qué esta lectura?
La información de ayuda dentro de VEXcode V5 también proporciona información sobre los bloques, pero aquí, los datos que se recopilan se contextualizan en cuanto a lo que le dicen específicamente al usuario sobre el objeto en la instantánea.
Notas:
-
Los valores centerX y centerY de toda la instantánea se utilizan para determinar si el objeto está a la izquierda/derecha o por encima/debajo del punto central del robot. Se calculan dividiendo el número total de píxeles en ese eje por dos (por ejemplo, centerX de snapshot = 315 / 2 = 157.5).
Podemos suponer que el punto central del robot es el mismo que el punto central de la instantánea del sensor de visión porque el sensor de visión debe montarse en el centro del robot y mirando hacia adelante. La posición del sensor de visión en la construcción del robot y el grado en que el sensor de visión podría estar inclinado hacia abajo deben tenerse en cuenta al juzgar la posición del objeto en relación con el punto central del robot (o del sensor de visión).
-
Los valores de Y aumentan hacia abajo dentro de la instantánea. Asegúrese de que los estudiantes lo reconozcan antes de pasar a la siguiente parte.
¿Cómo se calculan los valores del centro X y del centro Y?
Los valores se calculan en función de las coordenadas dentro de la instantánea. El ancho y el alto del objeto ya están calculados.
El sensor de visión rastrea los valores X e Y de la esquina superior izquierda del objeto. A continuación, esas coordenadas son (84, 34).

Los valores de X central e Y central se pueden calcular en función de las coordenadas de la esquina superior izquierda (84, 34) y los valores de ancho (W 140) y altura (H 142) proporcionados.

- centerX = 140/2 + 84 = 154
- centerX = la mitad del ancho del objeto añadido a su coordenada X más a la izquierda
- centerY = 142/2 + 34 = 105
- centerY = la mitad de la altura del objeto añadido a su coordenada Y más alta
![]() Teacher Toolbox
-
Concluyendo esta página
Teacher Toolbox
-
Concluyendo esta página
Asegúrese de que los estudiantes entiendan las matemáticas involucradas en la búsqueda de los valores de la X central y la Y central. Lo necesitarán para la actividad de la página siguiente.
Pregunte cómo se relacionan los valores (84, 34) y (W 140, H 142) con las coordenadas proporcionadas en las esquinas de la instantánea. Los estudiantes deben reconocer que toda la instantánea se asigna a un plano de coordenadas en función del número de píxeles. Los valores de X van de 0 a 315 (316 píxeles de ancho) y los valores de Y van de 0 a 211 (212 píxeles de alto). Las coordenadas y el tamaño del objeto se basan en cuántos píxeles ocupa el objeto a lo largo de esos ejes.