
Preparati per la sfida dei dati di visione - basata sui blocchi
![]() Toolbox per l'insegnante
-
Lo scopo di questa attività
Toolbox per l'insegnante
-
Lo scopo di questa attività
Il sensore visivo fornisce una varietà di dati che possono essere utilizzati nei progetti. I blocchi Sensing consentono all'utente di far sì che il progetto acquisisca istantanee, decida se l'oggetto esiste, decida quanti ne esistono, determini le coordinate X e Y del centro dell'oggetto all'interno dell'istantanea del sensore di visione e determini la larghezza e l'altezza dell'oggetto in pixel all'interno dell'istantanea. Questa attività introdurrà tutti i blocchi correlati necessari per raccogliere tali informazioni in preparazione della Vision Data Challenge.
Di seguito è riportato uno schema della Vision Data Challenge di Rethink:
-
Esaminare un set di dati completo di informazioni raccolte dai blocchi di rilevamento del sensore visivo.
-
Completare un set di dati parziale di informazioni raccolte dal Vision Sensor su un'istantanea diversa.
-
Crea un set di dati basato su uno snapshot e sui blocchi di rilevamento del sensore visivo.
Blocchi di rilevamento del sensore di visione
VEXcode V5 contiene blocchi di rilevamento per il sensore visivo. I primi due li hai già usati nella sezione Play per acquisire un'istantanea e verificare se l'oggetto esiste.
Nella figura sottostante, puoi vedere che il blocco istantanea ha acquisito l'istantanea GREENBOX. L'oggetto GREENBOX è stato identificato nell'istantanea e quindi la risposta alla domanda se esiste è VERO.
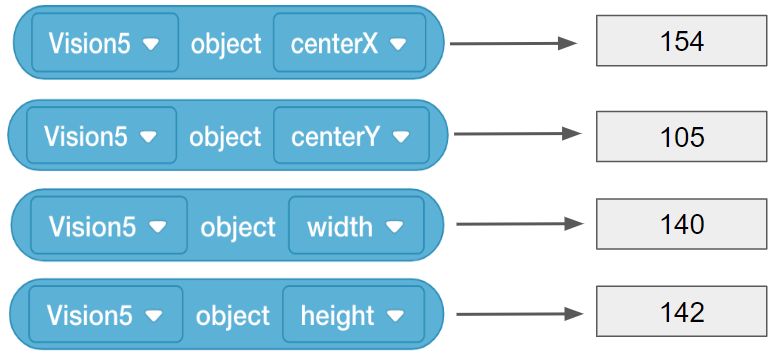
Diamo un'occhiata a questi altri blocchi Sensing e a cosa ci dicono i loro valori.
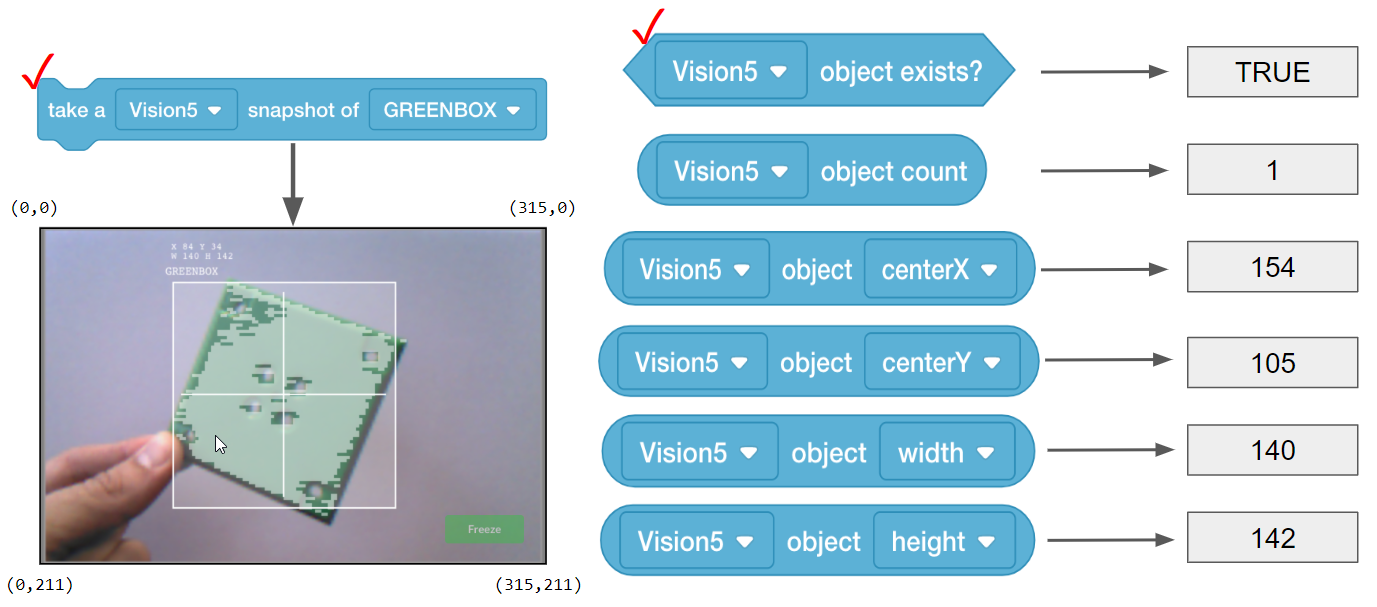
- Il blocco conteggio oggetti ci dice quanti oggetti GREENBOX sono presenti nello snapshot. Qui ne è stato rilevato solo 1.
- Il valore centrale X ci dice se l'oggetto GREENBOX si trova a sinistra o a destra del punto centrale del robot. Ricorda che il sensore visivo deve essere montato al centro del robot, rivolto in avanti, quindi la visuale dell'istantanea è la visuale del robot.
- Se il centro X è maggiore di 157,5, l'oggetto si trova a destra del punto centrale del robot.
- Se il centro X è minore di 157,5, l'oggetto si trova a sinistra del punto centrale del robot.
- Il valore centrale Y ci dice se il GREENBOX è più alto o più basso del punto centrale del robot.
- Se il centro Y è maggiore di 105,5, l'oggetto è più basso del punto centrale del robot.
- Se il centro Y è minore di 105,5, l'oggetto è più alto del punto centrale del robot.
- I valori di larghezza e altezza ci dicono quanto è vicino il GREENBOX al robot.
- L'oggetto delle stesse dimensioni sarà più grande in larghezza e altezza man mano che si avvicina al robot.
![]() Strumenti per l'insegnante
-
Perché questa lettura?
Strumenti per l'insegnante
-
Perché questa lettura?
Anche le informazioni della Guida in VEXcode V5 forniscono informazioni sui blocchi, ma in questo caso i dati raccolti sono contestualizzati in base a ciò che dicono specificamente all'utente sull'oggetto nello snapshot.
Note:
-
I valori centerX e centerY dell'intera istantanea vengono utilizzati per determinare se l'oggetto si trova a sinistra/destra oppure sopra/sotto il punto centrale del robot. Vengono calcolati dividendo per due il numero totale di pixel su quell'asse (ad esempio, centroX dell'istantanea = 315 / 2 = 157,5).
Possiamo supporre che il punto centrale del robot sia lo stesso del punto centrale dell'istantanea del sensore visivo, perché il sensore visivo dovrebbe essere montato al centro del robot e rivolto in avanti. Quando si valuta la posizione dell'oggetto rispetto al punto centrale del robot (o del sensore visivo), è necessario tenere conto della posizione del sensore visivo sulla struttura del robot e del grado in cui il sensore visivo potrebbe essere angolato verso il basso.
-
I valori Y aumentano verso il basso all'interno dell'istantanea. Assicuratevi che gli studenti lo capiscano prima di passare alla parte successiva.
Come vengono calcolati i valori del centro X e del centro Y?
I valori vengono calcolati in base alle coordinate all'interno dell'istantanea. La larghezza e l'altezza dell'oggetto sono già calcolate.
Il sensore visivo traccia i valori X e Y dell'angolo superiore sinistro dell'oggetto. Di seguito, le coordinate sono (84, 34).

I valori del centro X e del centro Y possono essere calcolati in base alle coordinate dell'angolo superiore sinistro (84, 34) e ai valori di larghezza (W 140) e altezza (H 142) forniti.
- centroX = 140/2 + 84 = 154
- centerX = metà della larghezza dell'oggetto aggiunta alla sua coordinata X più a sinistra
- centroY = 142/2 + 34 = 105
- centerY = metà dell'altezza dell'oggetto aggiunta alla sua coordinata Y più in alto
![]() Toolbox per l'insegnante
-
Conclusione di questa pagina
Toolbox per l'insegnante
-
Conclusione di questa pagina
Assicuratevi che gli studenti comprendano i calcoli matematici necessari per trovare i valori del centro X e del centro Y. Ne avranno bisogno per l'attività nella pagina successiva.
Chiedi come i valori (84, 34) e (W 140, H 142) si relazionano alle coordinate fornite negli angoli dell'istantanea. Gli studenti devono comprendere che l'intera istantanea è mappata su un piano cartesiano in base al numero di pixel. I valori X vanno da 0 a 315 (316 pixel di larghezza) e i valori Y vanno da 0 a 211 (212 pixel di altezza). Le coordinate e le dimensioni dell'oggetto si basano sul numero di pixel che l'oggetto occupa lungo quegli assi.