
Bereid je voor op de Vision Data Challenge - op blokken gebaseerd
![]() Toolbox voor leerkrachten
-
Het doel van deze activiteit
Toolbox voor leerkrachten
-
Het doel van deze activiteit
De Vision Sensor levert uiteenlopende gegevens die u in projecten kunt gebruiken. Met de Sensing-blokken kan de gebruiker het project momentopnamen laten maken, bepalen of het object bestaat, bepalen hoeveel er zijn, de X- en Y-coördinaten van het middelpunt van het object binnen de momentopname van de Vision Sensor bepalen en de breedte en hoogte van het object in pixels binnen de momentopname bepalen. Deze activiteit introduceert alle gerelateerde blokken die nodig zijn om die informatie te verzamelen ter voorbereiding op de Vision Data Challenge.
Hieronder volgt een overzicht van de Vision Data Challenge van Rethink:
-
Bekijk een volledige dataset met informatie verzameld via de sensorblokken van de Vision Sensor.
-
Maak een gedeeltelijke dataset met informatie verzameld via de Vision Sensor over een andere momentopname.
-
Maak een dataset op basis van een momentopname en de Sensing-blokken van de Vision Sensor.
De detectieblokken van de zichtsensor
VEXcode V5 heeft Sensing blocks voor de Vision Sensor. De eerste twee heb je al gebruikt in het gedeelte Afspelen om een momentopname te maken en te controleren of het object bestaat.
In de onderstaande afbeelding zie je dat het bloksnapshotde GREENBOX-momentopname heeft vastgelegd. Het object GREENBOX is in de momentopname geïdentificeerd en het antwoord op de vraag of het bestaat, is dus WAAR.
Laten we eens kijken naar deze andere Sensing-blokken en wat hun waarden ons vertellen.
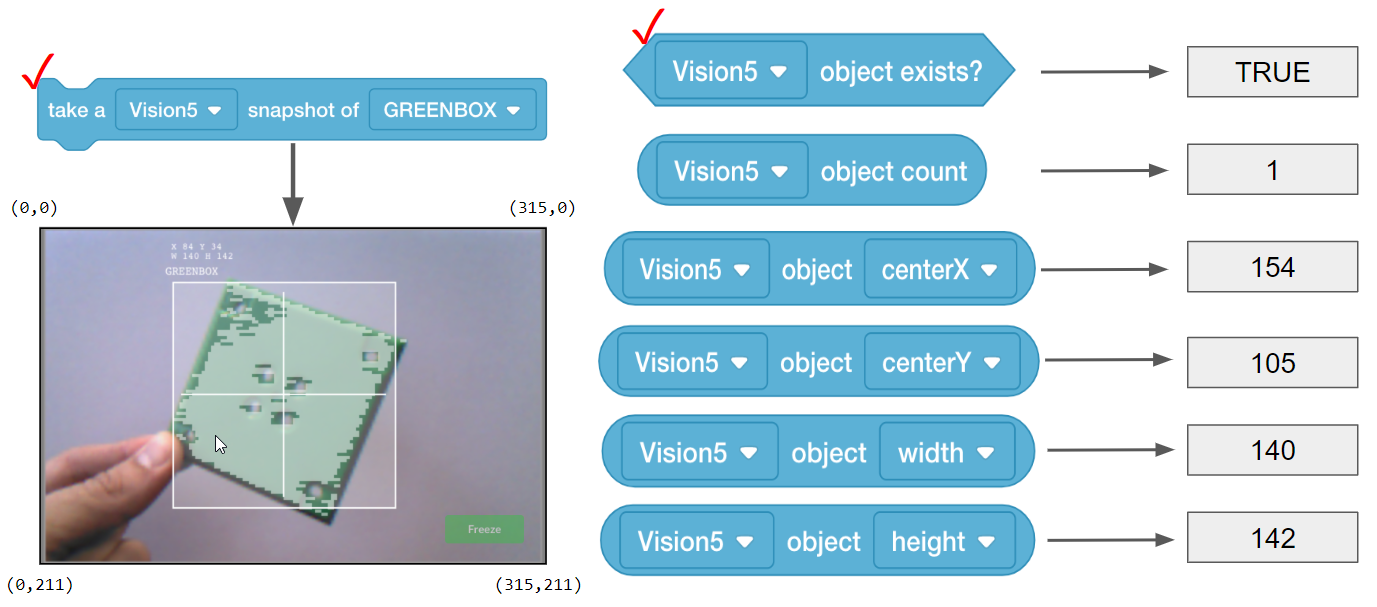
- Het blokobject countgeeft aan hoeveel GREENBOX-objecten er in de momentopname staan. Hier is er slechts 1 gedetecteerd.
- De middelste X-waarde vertelt ons of het GREENBOX-object zich links of rechts van het middelpunt van de robot bevindt. Vergeet niet dat de Vision-sensor in het midden van de robot naar voren moet worden gemonteerd en dat het beeld van de momentopname dus het beeld van de robot is.
- Als het midden X groter is dan 157,5, bevindt het object zich rechts van het middelpunt van de robot.
- Als het midden X kleiner is dan 157,5, bevindt het object zich links van het middelpunt van de robot.
- De middelste Y-waarde vertelt ons of de GREENBOX hoger of lager is dan het middelpunt van de robot.
- Als het middelpunt Y groter is dan 105,5, is het object lager dan het middelpunt van de robot.
- Als het middelpunt Y kleiner is dan 105,5, is het object hoger dan het middelpunt van de robot.
- De breedte- en hoogtewaarden vertellen ons hoe dicht de GREENBOX bij de robot staat.
- Het object van dezelfde grootte zal groter zijn in breedte en hoogte naarmate het dichter bij de robot komt.
![]() Toolbox voor leerkrachten
-
Waarom deze lezing?
Toolbox voor leerkrachten
-
Waarom deze lezing?
De Help-informatie in VEXcode V5 biedt ook informatie over de blokken, maar hier worden de verzamelde gegevens gecontextualiseerd op basis van wat ze de gebruiker specifiek vertellen over het object in de momentopname.
Opmerkingen:
-
De centerX- en centerY-waarden van de volledige momentopname worden gebruikt om te bepalen of het object zich links/rechts of boven/onder het middelpunt van de robot bevindt. Ze worden berekend door het totale aantal pixels op die as te delen door twee (bijv. middenX van momentopname = 315 / 2 = 157,5).
We kunnen ervan uitgaan dat het middelpunt van de robot gelijk is aan het middelpunt van de momentopname van de Vision Sensor, omdat de Vision Sensor in het midden van de robot moet worden gemonteerd en naar voren moet wijzen. Bij het beoordelen van de positie van het object ten opzichte van het middelpunt van de robot (of de vision sensor) moet rekening worden gehouden met de positie van de vision sensor op de constructie van de robot en de mate waarin de vision sensor naar beneden kan zijn gericht.
-
De Y-waarden nemen binnen de momentopname naar beneden toe. Zorg ervoor dat de leerlingen dit beseffen voordat ze naar het volgende onderdeel gaan.
Hoe worden de X- en Y-waarden in het midden berekend?
De waarden worden berekend op basis van de coördinaten binnen de momentopname. De breedte en hoogte van het object zijn al berekend.
De Vision Sensor houdt de X- en Y-waarden bij van de linkerbovenhoek van het object. Hieronder staan die coördinaten (84, 34).
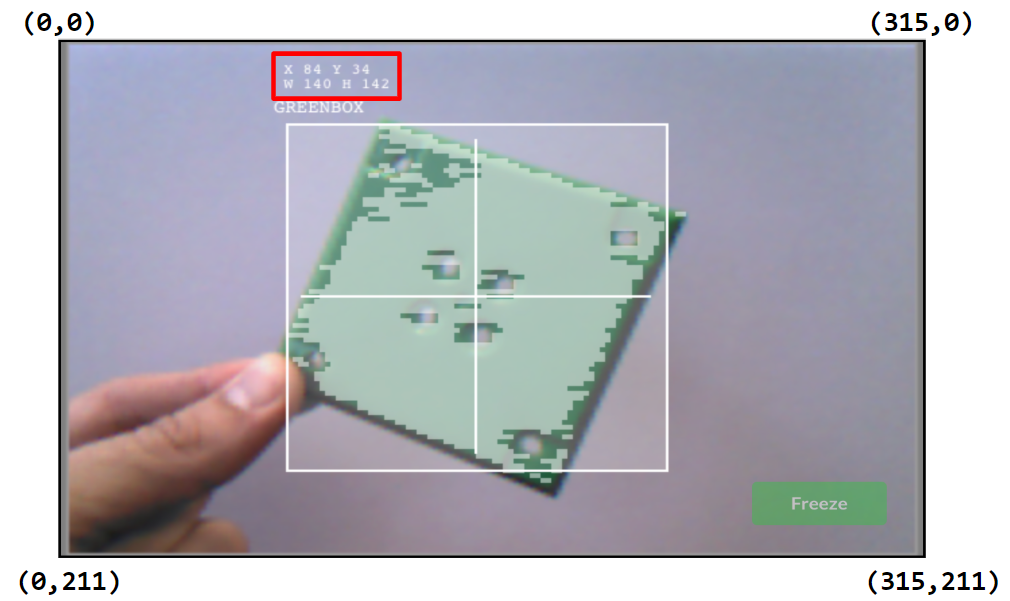
De middelste X- en middelste Y-waarden kunnen worden berekend op basis van de coördinaten van de linkerbovenhoek (84, 34) en de opgegeven waarden voor breedte (W 140) en hoogte (H 142).
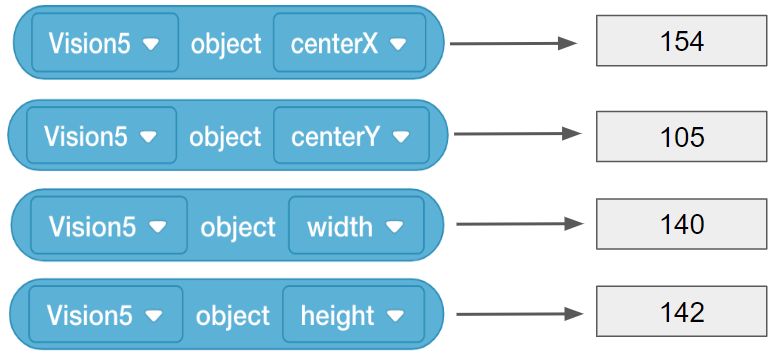
- centrumX = 140/2 + 84 =154
- centerX = de helft van de breedte van het object toegevoegd aan de meest linkse X-coördinaat
- centrumY = 142/2 + 34 =105
- centerY = de helft van de hoogte van het object toegevoegd aan de bovenste Y-coördinaat
![]() Toolbox voor docenten
-
Deze pagina afsluiten
Toolbox voor docenten
-
Deze pagina afsluiten
Zorg ervoor dat leerlingen de wiskunde begrijpen die nodig is om de waarden voor middelpunt X en middelpunt Y te bepalen. Ze hebben het nodig voor de activiteit op de volgende pagina.
Vraag hoe de waarden (84, 34) en (B 140, H 142) zich verhouden tot de coördinaten in de hoeken van de momentopname. Studenten moeten beseffen dat de volledige momentopname wordt afgebeeld op een coördinatenvlak op basis van het aantal pixels. De X-waarden variëren van 0 tot 315 (316 pixels breed) en de Y-waarden variëren van 0 tot 211 (212 pixels hoog). De coördinaten en de grootte van het object worden bepaald door het aantal pixels dat het object langs die assen beslaat.