
Lektion 2: Verwenden von Vergleichsblöcken und Fahren bis in die Nähe
In dieser Lektion erstellen Sie ein Projekt, das den VR-Roboter mithilfe des Abstandssensors mit dem <Less than> Booleschen Reporterblock zum Buchstaben „A“ navigiert. In der Mini-Challenge wendest du diese Fähigkeiten an, um vom Beginn des Mauerlabyrinths bis zur Zahl "1" zu navigieren.

Lernergebnisse
- Identifizieren Sie, dass der <Greater than> Block ein Boolescher Block ist, der meldet, wenn der erste Wert größer als der zweite Wert ist.
- Identifizieren Sie, dass der <Less than> Block ein Boolescher Block ist, der meldet, wenn der erste Wert kleiner als der zweite Wert ist.
- Stellen Sie fest, dass die <Greater than> oder <Less than> -Blöcke einen WAHREN oder FALSCHEN Wert in einem [Warten bis] -Block melden.
- Beschreiben Sie, wie Sie ein Projekt erstellen, bei dem ein VR-Roboter vorwärts fährt, bis der Wert des Abstandssensors unter einem Schwellenwert von 50 Millimetern (mm) liegt.
Projekt benennen und speichern
- Starten Sie ein neues Projekt in VEXcode VR und benennen Sie das Projekt Unit5Lesson2. Denken Sie daran, dass Sie VEXcode-Blöcke, Switch-Blöcke oder eine Kombination aus beiden Blocktypen für Ihr Projekt verwenden können.

Verwenden Sie den Abstandssensor, um Wände zu vermeiden
- Ziehen Sie den Block [Drive] in den Arbeitsbereich.
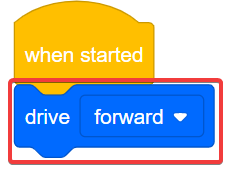
- Bringen Sie einen [Warten bis] -Block unter dem [Laufwerk] -Block an.

Dieses Projekt wird den Abstandssensor verwenden, um durch den Wandlabyrinth-Spielplatz zu navigieren, ohne gegen Wände zu stoßen. In diesem Projekt verwenden Sie den Block (Abstand von) innerhalb des <Less than> Booleschen Blocks.
Die <Less than>, <Greater than>, und <Equal to> sind Vergleichsblöcke - sie vergleichen Werte. Sie sind auch Boolesche Reporterblöcke, die einen WAHREN Wert melden, wenn die Vergleichsbedingung erfüllt ist, und FALSCH, wenn die Bedingung NICHT erfüllt ist.
- <Less than> meldet WAHR, wenn der erste Wert kleiner als der zweite Wert ist, und FALSCH, wenn der erste Wert größer oder gleich dem zweiten Wert ist.

- <Greater than> meldet WAHR, wenn der erste Wert größer als der zweite Wert ist, und FALSCH, wenn der erste Wert kleiner oder gleich dem zweiten Wert ist.

- <Equal to> berichtet TRUE, wenn die beiden Werte genau gleich sind, und FALSE, wenn sie es nicht sind.
Vergleichsblöcke können Dezimalzahlen, ganze Zahlen oder numerische Blöcke akzeptieren. Sie akzeptieren auch runde Reporterblöcke, wie den Block (Entfernung von). Der Block (Abstand von) kann bei Verwendung des Abstandssensors in einem Projekt mit einem Vergleichsblock versehen werden.
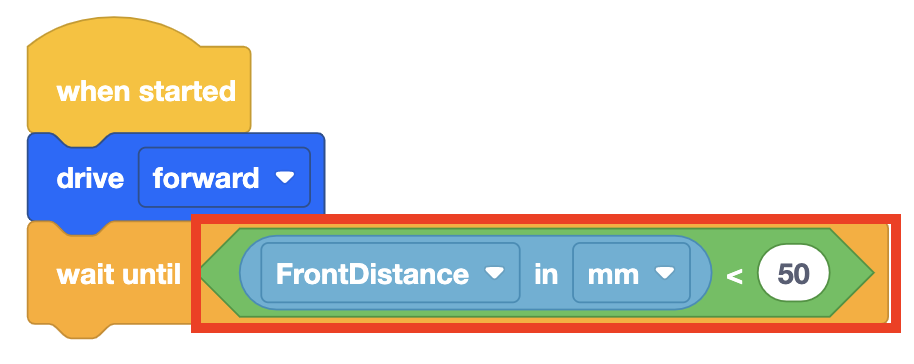
In diesem Beispiel wird der Block TRUE melden, wenn der Abstand zu einem Objekt und dem Abstandssensor auf einem VR-Roboter weniger als 50 Millimeter (mm) beträgt.

- Ziehen Sie den <Less than> Booleschen Block in den Block [Warten bis].
- Platzieren Sie den runden (Abstand von) Block innerhalb des Booleschen Reporterblocks
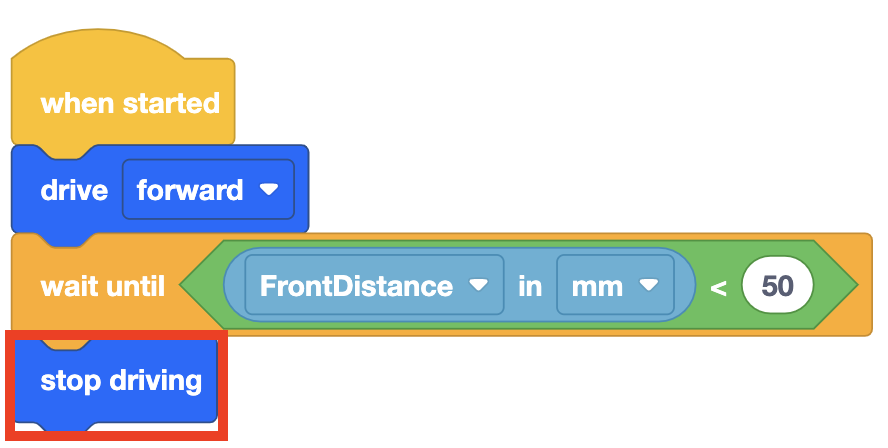
- Der Block [Warten bis] hält den VR-Roboter vorwärts, bis die Bedingung erfüllt ist und der gemeldete Abstand weniger als 50 Millimeter (mm) beträgt. Dann fährt das Projekt mit dem nächsten Block im Stapel fort, dem Block [Stop driving].
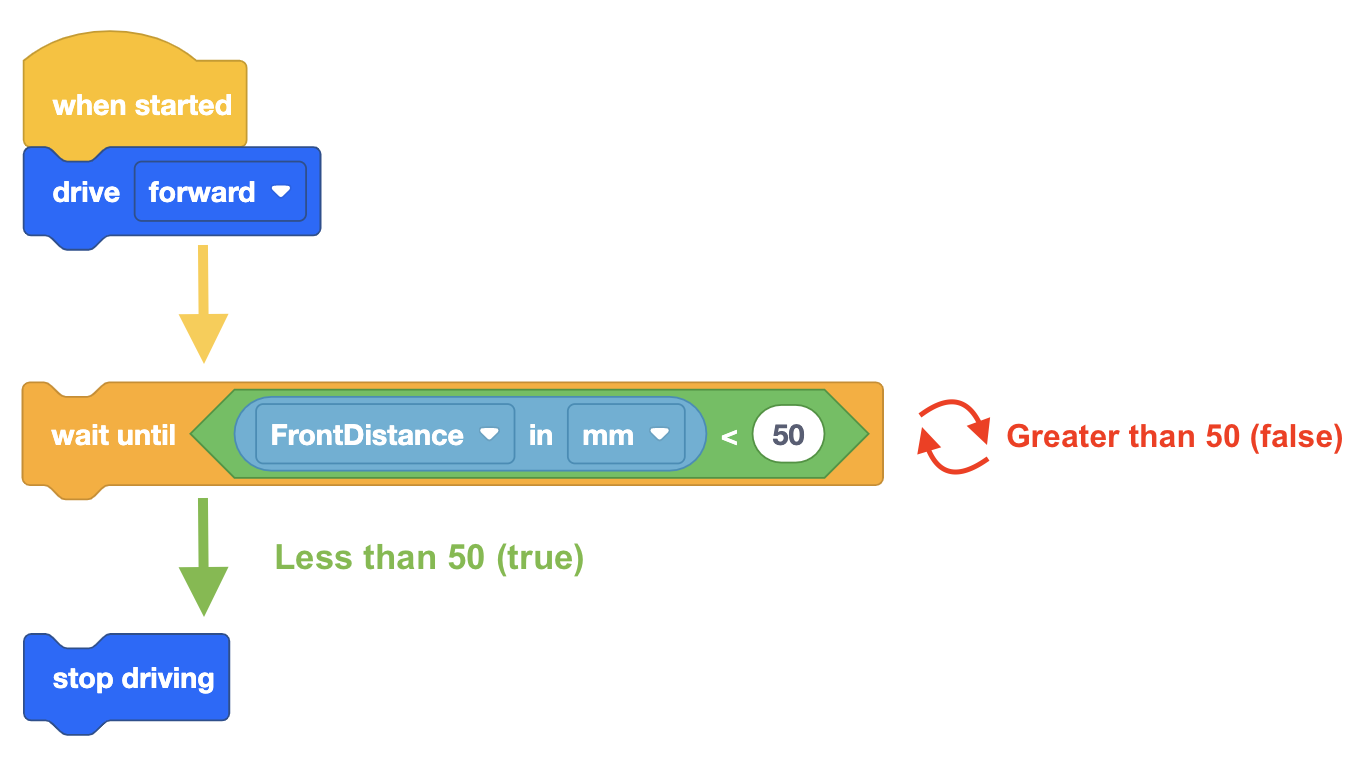
- Nach dem [Warten bis] -Block ist ein [Stop driving] -Block erforderlich, da der VR-Roboter so lange weiterfährt, bis er zum Anhalten angewiesen wird. Fügen Sie dem Projekt einen [Stop driving] -Block hinzu.
- Starten Sie den Wall Maze Playground , wenn er noch nicht geöffnet ist, und führen Sie das Projekt aus.
- Beobachten Sie den VR-Roboter vom Beginn des Wandlabyrinths an und halten Sie an, wenn der Abstandssensor meldet, dass er weniger als 50 Millimeter (mm) von der Wand entfernt ist.

- Wenn Sie den <Less than> Block mit dem (Abstand von) -Block innerhalb des [Warten bis] -Blocks verwenden, wird der VR-Roboter angewiesen, zu warten, bis er weniger als 50 Millimeter (mm) von der Wand entfernt ist, bevor er anhält.
- Setzen Sie den Spielplatz zurück, um den VR-Roboter zurück in die Ausgangsposition zu bewegen.
Verwenden von Schalterblöcken
In dieser Lektion haben Sie die <Greater than> <Less than>, und <Equal to> Booleschen Blöcke kennengelernt. Die folgende Abbildung zeigt die Booleschen Vergleichsblöcke wechseln. Damit ein Boolescher Switch-Block wie vorgesehen funktioniert, müssen die Switch-Python-Funktionen mit der richtigen Rechtschreibung und Interpunktion eingegeben werden.
Beachten Sie, dass <Equal to> der Switch-Block zwei Gleichheitszeichen (==) verwendet. Dies liegt daran, dass in Python ein Gleichheitszeichen (=) eine Zuweisung eines Wertes darstellt (z. B. x = 10), während zwei Gleichheitszeichen (==) überprüfen, ob zwei Werte gleich sind. Achten Sie darauf, zwei Gleichheitszeichen zu verwenden, wenn Sie den <Equal to> Schalterblock verwenden. 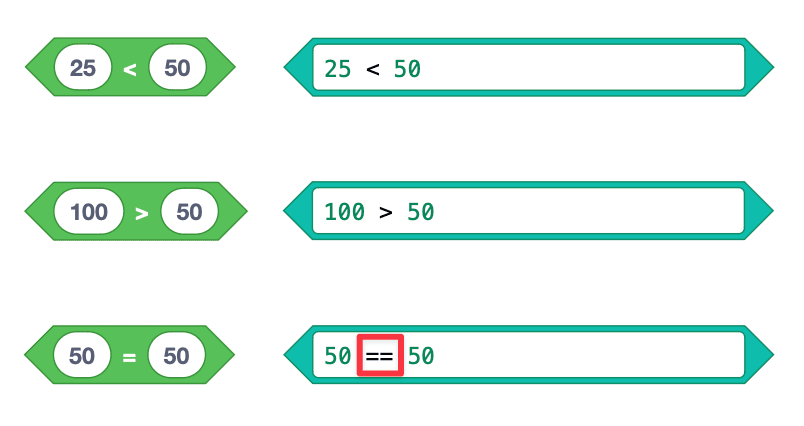
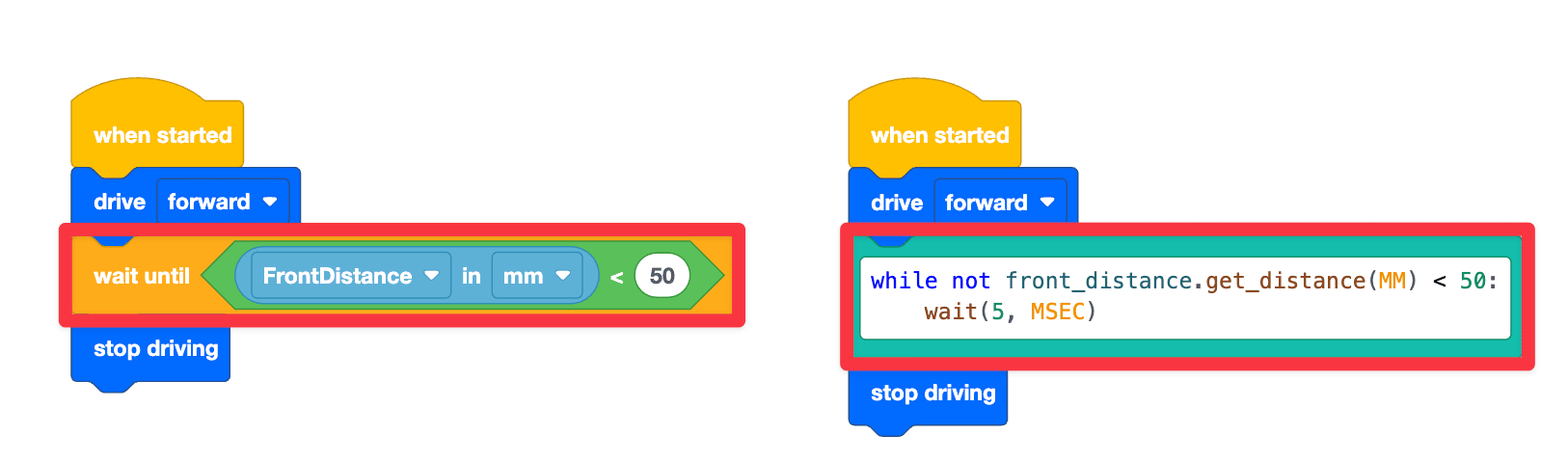
Sie haben auch ein Beispielprojekt gesehen, bei dem der VR-Roboter vorwärts fährt, bis der gemeldete Abstand weniger als 50 Millimeter (mm) von einem Objekt beträgt. Dann stoppt der VR-Roboter. Das Projekt auf der rechten Seite zeigt die entsprechenden Python-Befehle innerhalb eines Switch-Blocks. Der Befehl, obwohl nicht front_distance.get_distance (MM) < 50, weist den Roboter an zu überprüfen, ob die gemeldete Entfernung weniger als 50 mm von einem Objekt entfernt ist.
Die nächste eingerückte Codezeile, wait (5, MS), pausiert den Code für 5 Millisekunden. Der Befehl, der überprüft, ob die gemeldete Entfernung von einem Objekt weniger als 50 mm beträgt, wartet 5 MS, bevor der Zustand erneut überprüft wird.
Wählen Sie die Schaltfläche Weiter um mit dem Rest dieser Lektion fortzufahren.