
Lição 2: Usando blocos de comparação e condução até perto
Nesta lição, você criará um projeto que navega o robô de RV até a letra ‘A‘ usando o sensor de distância com o bloco repórter <Less than> booleano. No mini-desafio, você aplicará essas habilidades para navegar desde o início do Labirinto da Parede até o número '1'.

Resultados de Aprendizagem
- Identifique que o <Greater than> bloco é um bloco booleano que informa se o primeiro valor é maior que o segundo valor.
- Identifique que o <Less than> bloco é um bloco booleano que informa se o primeiro valor é menor que o segundo valor.
- Identifique que os <Less than> blocos <Greater than> ou relatam um valor VERDADEIRO ou FALSO em um bloco [Aguarde até].
- Descreva como criar um projeto que tenha uma unidade de Robô VR até que o valor do Sensor de Distância seja inferior a um valor limite de 50 milímetros (mm).
Nomeie e guarde o projeto
- Inicie um novo projeto no VEXcode VR e nomeie o projeto Unit5Lesson2. Lembre-se de que você pode usar blocos VEXcode, blocos Switch ou uma combinação de ambos os tipos de blocos para o seu projeto.

Use o sensor de distância para evitar paredes
- Arraste o bloco [Drive] para o espaço de trabalho.
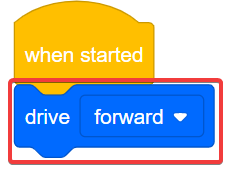
- Anexe um bloco [Aguarde até] abaixo do bloco [Drive].

Este projeto usará o Sensor de Distância para navegar pelo Parque Infantil do Labirinto da Parede sem esbarrar nas paredes. Você usará o bloco (Distância de) dentro do bloco <Less than> booleano neste projeto.
Os <Less than>, <Greater than>, e <Equal to> são blocos de comparação - eles comparam valores. Eles também são blocos reportadores booleanos que relatam um valor VERDADEIRO quando a condição de comparação é atendida e FALSO quando a condição NÃO é atendida.
- <Less than> relata VERDADEIRO quando o primeiro valor é menor que o segundo valor e FALSO quando o primeiro valor é maior ou igual ao segundo valor.

- <Greater than> relata VERDADEIRO quando o primeiro valor é maior que o segundo valor e FALSO quando o primeiro valor é menor ou igual ao segundo valor.

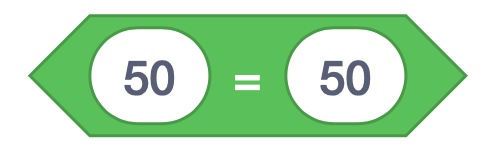
- <Equal to> relata VERDADEIRO quando os dois valores são exatamente os mesmos e FALSO quando não são.
Os blocos de comparação podem aceitar decimais, inteiros ou blocos numéricos. Eles também aceitam blocos de repórteres redondos, como o bloco (Distância de). O bloco (Distância de) pode ser com um bloco de comparação ao usar o Sensor de Distância em um projeto.
Neste exemplo, o bloco reportará VERDADEIRO quando a distância de um objeto e do Sensor de Distância em um Robô VR for inferior a 50 milímetros (mm).

- Arraste o bloco <Less than> Booleano para o bloco [Aguarde até].
- Coloque o bloco redondo (Distância de) dentro do bloco repórter booleano

- O bloco [Aguarde até] manterá o robô VR avançando até que a condição seja atendida e a distância relatada seja inferior a 50 milímetros (mm). Em seguida, o projeto passará para o próximo bloco da pilha, que será o bloco [Stop driving].

- Um bloco [Stop driving] é necessário após o bloco [Wait until] porque o robô VR continuará a dirigir até que seja instruído a parar. Adicione um bloco [Stop driving] ao projeto.

- Inicie o Wall Maze Playground, se ainda não estiver aberto, e execute o projeto.
- Observe o Robô VR dirigir desde o início do Labirinto de Parede e pare quando o Sensor de Distância informar que está a menos de 50 milímetros (mm) da parede.

- Usando o <Less than> bloco com o bloco (Distância de) dentro do bloco [Aguarde até], instrua o Robô VR a esperar até que esteja a menos de 50 milímetros (mm) da parede antes de parar.
- Redefina o Playground para mover o Robô VR de volta à posição inicial.
Usando Blocos de Interruptor
Nesta lição, você aprendeu sobre os blocos <Greater than> <Less than>, e <Equal to> Booleano. A imagem abaixo mostra os blocos de comparação do Switch Boolean. Para que um bloco booleano Switch funcione como pretendido, as funções do Switch Python devem ser inseridas com a ortografia e pontuação corretas.
Observe que o <Equal to> bloco Switch usa dois sinais iguais (==). Isso ocorre porque, em Python, um sinal de igual (=) representa uma atribuição de um valor (por exemplo, x = 10), enquanto dois sinais de igual (==) verificam se dois valores são iguais. Certifique-se de usar dois sinais de igual ao usar o <Equal to> bloco Switch. 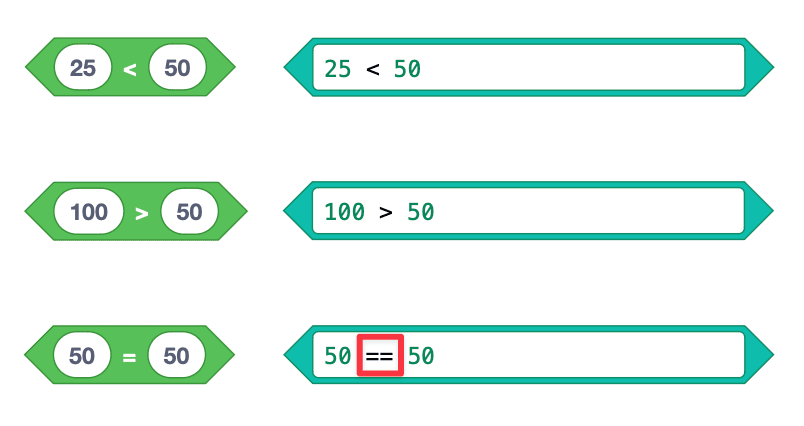
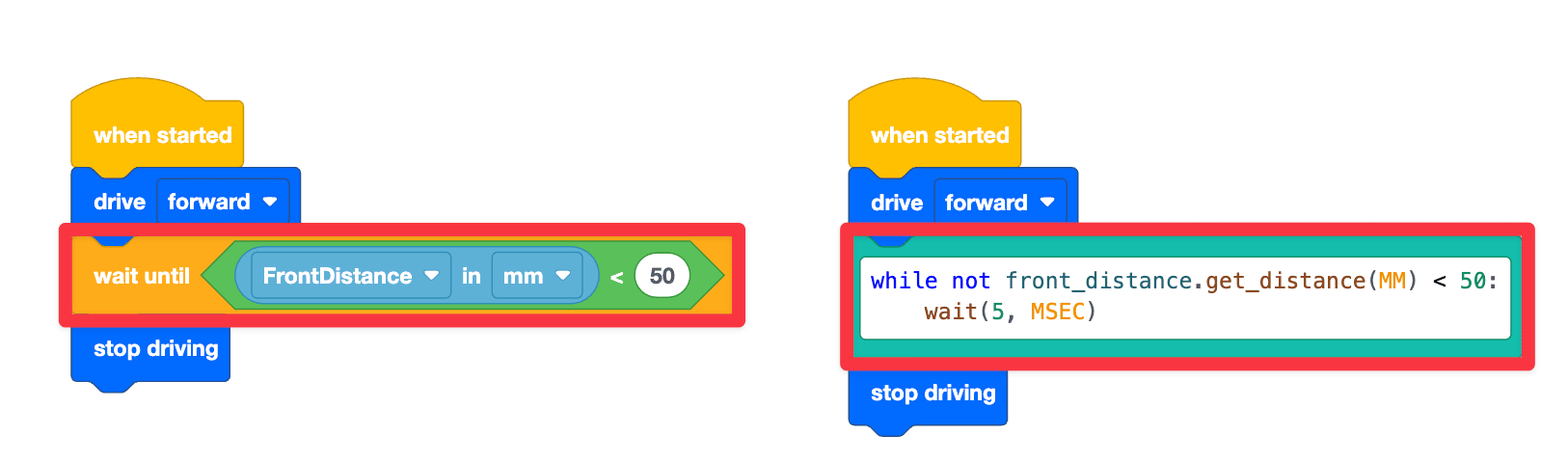
Você também viu um exemplo de projeto em que o Robô VR avançará até que a distância relatada seja inferior a 50 milímetros (mm) de um objeto. Então, o Robô VR irá parar. O projeto à direita mostra os comandos Python correspondentes dentro de um bloco Switch. O comando, embora não front_distance.get_distance(MM) < 50, diz ao robô para verificar se a distância relatada é inferior a 50 MM de um objeto.
A próxima linha de código recuada, wait (5, MS), pausa o código por 5 milissegundos. O comando que verifica se a distância informada é inferior a 50 MM de um objeto aguardará 5 MS antes de verificar a condição novamente.
Selecione o botão Seguinte para continuar com o resto desta lição.