
Leçon 2 : Utilisation des blocs de comparaison et conduite jusqu'à proximité
Dans cette leçon, vous allez créer un projet qui fait naviguer le robot VR jusqu'à la lettre « A » à l'aide du capteur de distance avec le bloc rapporteur <Less than> booléen. Dans le mini-challenge, vous appliquerez ces compétences pour naviguer du début du labyrinthe mural au nombre « 1 ».

Résultats d'apprentissage
- Identifiez que le <Greater than> bloc est un bloc booléen qui signale si la première valeur est supérieure à la deuxième valeur.
- Identifiez que le <Less than> bloc est un bloc booléen qui signale si la première valeur est inférieure à la deuxième valeur.
- Identifiez que les <Less than> blocs <Greater than> ou signalent une valeur VRAIE ou FAUSSE dans un bloc [Attendre jusqu'à].
- Décrire comment créer un projet qui a un robot VR qui avance jusqu'à ce que la valeur du capteur de distance soit inférieure à une valeur seuil de 50 millimètres (mm).
Nommez et enregistrez le projet
- Lancez un nouveau projet dans VEXcode VR et nommez le projet Unit5Lesson2. N'oubliez pas que vous pouvez utiliser des blocs VEXcode, des blocs Switch ou une combinaison des deux types de blocs pour votre projet.

Utilisez le capteur de distance pour éviter les murs
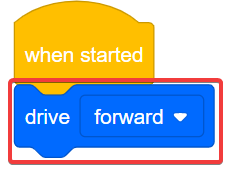
- Faites glisser le bloc [Drive] dans l'espace de travail.
- Fixez un bloc [Attendre jusqu'à] sous le bloc [Lecteur].

Ce projet utilisera le capteur de distance pour naviguer dans le terrain de jeu du labyrinthe mural sans heurter les murs. Vous utiliserez le bloc (Distance de) à l'intérieur du bloc <Less than> booléen dans ce projet.
Les blocs <Less than>, <Greater than>, et <Equal to> sont des blocs de comparaison - ils comparent les valeurs. Il s'agit également de blocs rapporteurs booléens qui rapportent une valeur VRAIE lorsque la condition de comparaison est remplie et une valeur FAUSSE lorsque la condition N'EST PAS remplie.
- <Less than> rapporte VRAI lorsque la première valeur est inférieure à la deuxième valeur et FAUX lorsque la première valeur est supérieure ou égale à la deuxième valeur.

- <Greater than> signale VRAI lorsque la première valeur est supérieure à la deuxième valeur, et FAUX lorsque la première valeur est inférieure ou égale à la deuxième valeur.

- <Equal to> signale VRAI lorsque les deux valeurs sont exactement les mêmes, et FAUX lorsqu'elles ne le sont pas.
Les blocs de comparaison peuvent accepter des décimales, des entiers ou des blocs numériques. Ils acceptent également les blocs rapporteurs ronds, tels que le bloc (Distance de). Le bloc (Distance depuis) peut être associé à un bloc de comparaison lors de l'utilisation du capteur de distance dans un projet.
Dans cet exemple, le bloc indiquera VRAI lorsque la distance d'un objet et du capteur de distance sur un robot VR est inférieure à 50 millimètres (mm).

- Faites glisser le bloc <Less than> booléen dans le bloc [Attendre].
- Placez le bloc rond (Distance de) à l'intérieur du bloc rapporteur booléen

- Le bloc [Attendre jusqu'à] maintiendra le robot VR en marche avant jusqu'à ce que la condition soit remplie et que la distance signalée soit inférieure à 50 millimètres (mm). Ensuite, le projet passera au bloc suivant de la pile, qui sera le bloc [Arrêter de conduire].

- Un bloc [Arrêter la conduite] est nécessaire après le bloc [Attendre jusqu'à] car le robot VR continuera à conduire jusqu'à ce qu'il reçoive l'instruction de s'arrêter. Ajoutez un bloc [Arrêter de conduire] au projet.

- Lancez le terrain de jeu Wall Maze s'il n'est pas déjà ouvert et exécutez le projet.
- Regardez le robot VR conduire depuis le début du labyrinthe mural et arrêtez-vous lorsque le capteur de distance signale qu'il se trouve à moins de 50 millimètres (mm) du mur.

- En utilisant le <Less than> bloc avec le bloc (Distance de) à l'intérieur du bloc [Attendre jusqu'à], demande au robot VR d'attendre jusqu'à ce qu'il soit à moins de 50 millimètres (mm) du mur avant de s'arrêter.
- Réinitialisez le terrain de jeu pour ramener le robot VR à la position de départ.
Utilisation des blocs de commutation
Dans cette leçon, vous avez appris à connaître les blocs <Greater than> <Less than>, , et <Equal to> booléens. L'image ci-dessous montre les blocs de comparaison booléens Switch. Pour qu'un bloc booléen de commutation fonctionne comme prévu, les fonctions Python de commutation doivent être saisies avec l'orthographe et la ponctuation correctes.
Notez que le <Equal to> bloc Switch utilise deux signes égaux (==). En effet, en Python, un signe égal (=) représente une affectation d'une valeur (par exemple, x = 10), tandis que deux signes égaux (==) vérifient si deux valeurs sont égales. Assurez-vous d'utiliser deux signes égaux lorsque vous utilisez le <Equal to> bloc de commutation. 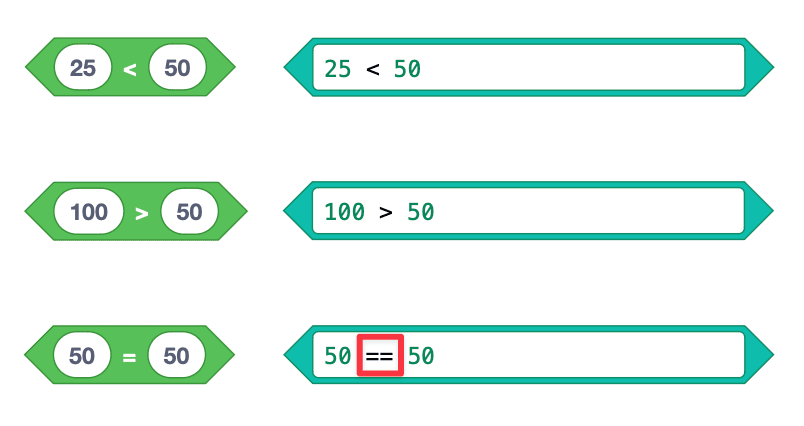
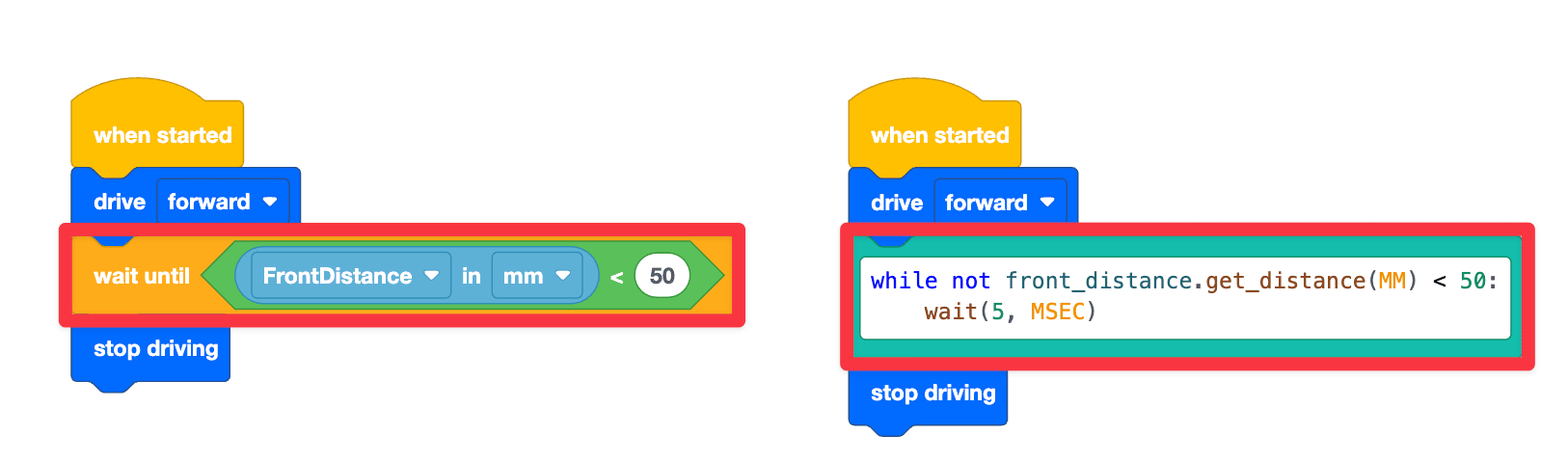
Vous avez également vu un exemple de projet dans lequel le robot VR avancera jusqu'à ce que la distance signalée soit inférieure à 50 millimètres (mm) d'un objet. Ensuite, le robot VR s'arrêtera. Le projet de droite affiche les commandes Python correspondantes à l'intérieur d'un bloc Switch. La commande, bien qu'elle ne soit pas front_distance.get_distance (MM) < 50, indique au robot de vérifier si la distance signalée est inférieure à 50 MM d'un objet.
La ligne de code indentée suivante, wait (5, MSEC), met le code en pause pendant 5 millisecondes. La commande qui vérifie si la distance signalée est inférieure à 50 MM d'un objet attendra 5 MS avant de vérifier à nouveau la condition.
Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.