
Lección 2: Usar bloques de comparación y conducir hasta cerca
En esta lección, crearás un proyecto que haga que el robot de realidad virtual navegue hasta la letra «A» utilizando el sensor de distancia con el bloque reportero <Less than> booleano. En el mini-reto, aplicarás estas habilidades para navegar desde el comienzo del laberinto de la pared hasta el número '1'.

Resultados de aprendizaje
- Identifique que el <Greater than> bloque es un bloque booleano que informa si el primer valor es mayor que el segundo valor.
- Identifique que el <Less than> bloque es un bloque booleano que informa si el primer valor es menor que el segundo valor.
- Identifique que los <Less than> bloques <Greater than> o informan un valor VERDADERO o FALSO en un bloque [Esperar hasta].
- Describa cómo crear un proyecto que tenga un accionamiento de robot VR hacia adelante hasta que el valor del sensor de distancia sea inferior a un valor umbral de 50 milímetros (mm).
Nombrar y guardar el proyecto
- Inicie un nuevo proyecto en VEXcode VR y nombre el proyecto Unit5Lesson2. Recuerde que puede usar bloques VEXcode, bloques Switch o una combinación de ambos tipos de bloques para su proyecto.

Utilice el sensor de distancia para evitar las paredes
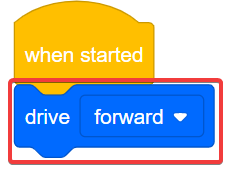
- Arrastra el bloque [Drive] al área de trabajo.
- Adjunte un bloque [Esperar hasta] debajo del bloque [Conducir].

Este proyecto utilizará el sensor de distancia para navegar a través del patio de recreo del laberinto de paredes sin toparse con las paredes. Utilizará el bloque (Distancia desde) dentro del bloque <Less than> booleano en este proyecto.
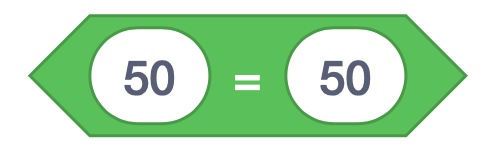
Los <Less than>, <Greater than>, y <Equal to> son bloques de comparación: comparan valores. También son bloques informadores booleanos que informan un valor VERDADERO cuando se cumple la condición de comparación, y FALSO cuando NO se cumple la condición.
- <Less than> informa VERDADERO cuando el primer valor es menor que el segundo valor y FALSO cuando el primer valor es mayor o igual que el segundo valor.

- <Greater than> informa VERDADERO cuando el primer valor es mayor que el segundo valor, y FALSO cuando el primer valor es menor o igual que el segundo valor.

- <Equal to> informa VERDADERO cuando los dos valores son exactamente iguales y FALSO cuando no lo son.
Los bloques de comparación pueden aceptar decimales, enteros o bloques numéricos. También aceptan bloques indicadores redondos, como el bloque (Distancia desde). El bloque (Distancia desde) puede ser con un bloque de comparación cuando se utiliza el sensor de distancia en un proyecto.
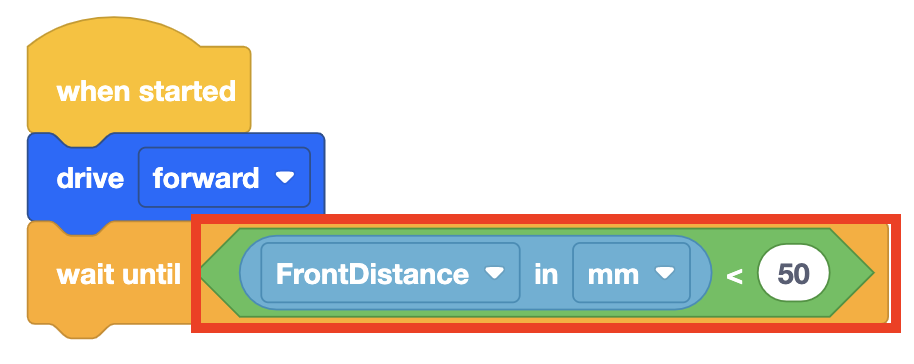
En este ejemplo, el bloque informará VERDADERO cuando la distancia desde un objeto y el sensor de distancia en un robot VR sea inferior a 50 milímetros (mm).

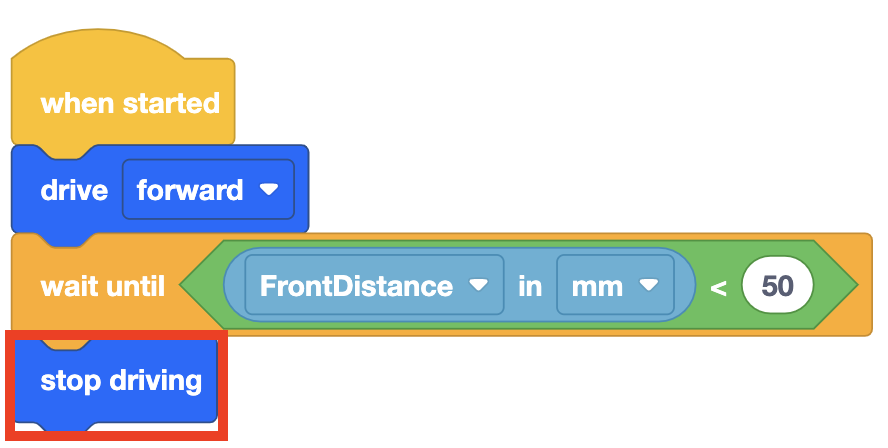
- Arrastre el bloque <Less than> booleano al bloque [Esperar hasta].
- Coloque el bloque redondo (Distancia desde) dentro del bloque informador booleano
- El bloque [Esperar hasta] mantendrá el robot VR avanzando hasta que se cumpla la condición y la distancia informada sea inferior a 50 milímetros (mm). Luego, el proyecto pasará al siguiente bloque de la pila, que será el bloque [Stop driving].
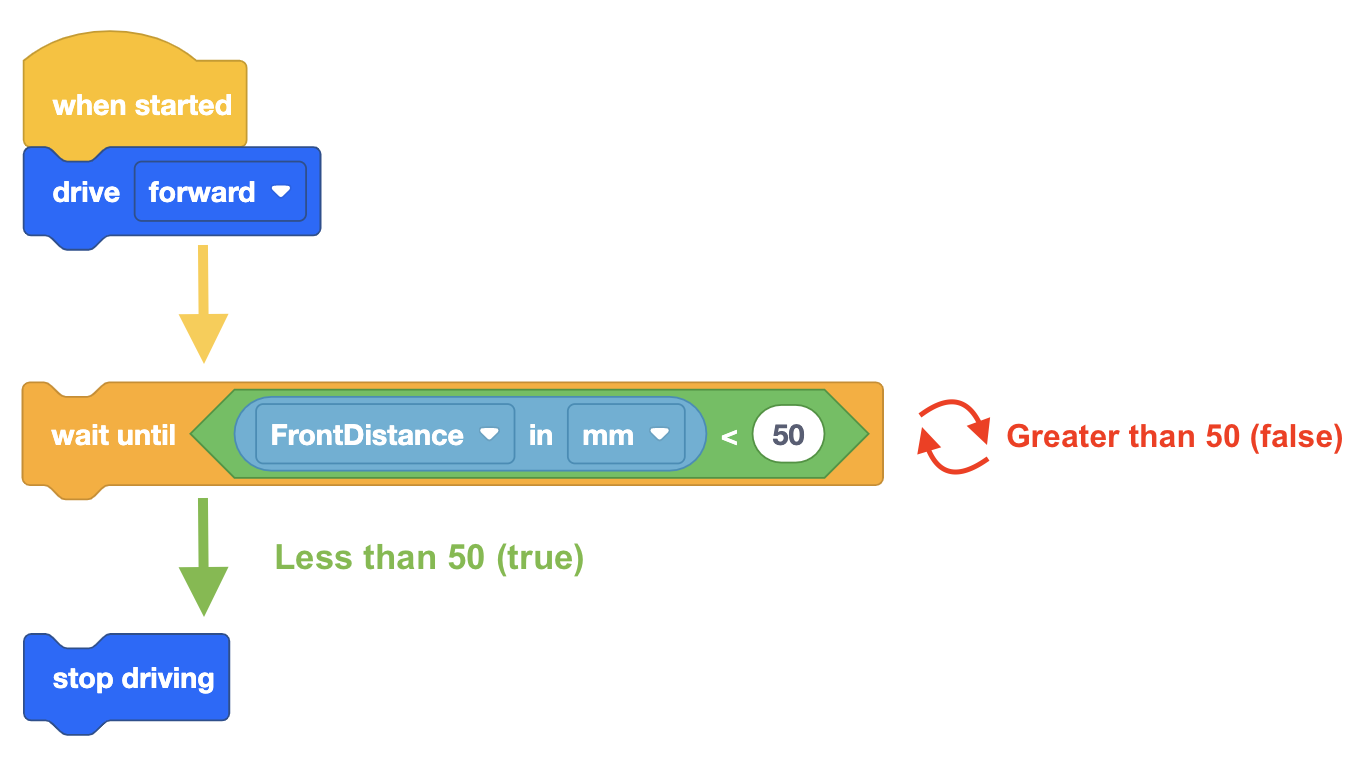
- Se necesita un bloque [Stop driving] después del bloque [Wait until] porque el VR Robot continuará conduciendo hasta que se le indique que se detenga. Añade un bloque [Stop driving] al proyecto.
- Inicie el Wall Maze Playground si aún no está abierto y ejecute el proyecto.
- Observe el accionamiento del robot VR desde el inicio del laberinto de pared y deténgase cuando el sensor de distancia indique que está a menos de 50 milímetros (mm) de la pared.

- Usando el <Less than> bloque con el bloque (Distancia desde) dentro del bloque [Esperar hasta], indica al robot VR que espere hasta que esté a menos de 50 milímetros (mm) de la pared antes de detenerse.
- Reinicie el patio de recreo para mover el robot de realidad virtual de nuevo a la posición inicial.
Uso de bloques de interruptores
En esta lección, aprendiste sobre los bloques <Equal to> booleanos <Greater than> <Less than>, y. La siguiente imagen muestra los bloques de comparación de Switch Boolean. Para que un bloque booleano Switch funcione según lo previsto, las funciones de Switch Python deben introducirse con la ortografía y puntuación correctas.
Tenga en cuenta que el <Equal to> bloque Switch utiliza dos signos iguales (==). Esto se debe a que en Python, un signo igual (=) representa una asignación de un valor (por ejemplo, x = 10), mientras que dos signos iguales (==) comprueban si dos valores son iguales. Asegúrese de usar dos signos iguales cuando utilice el <Equal to> bloque Switch. 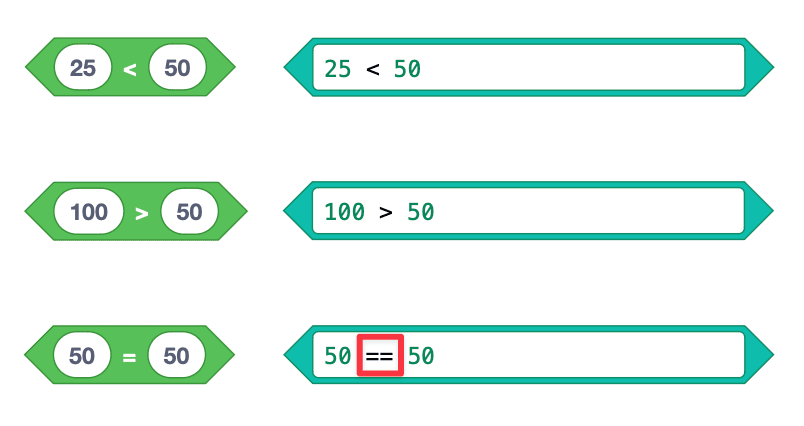
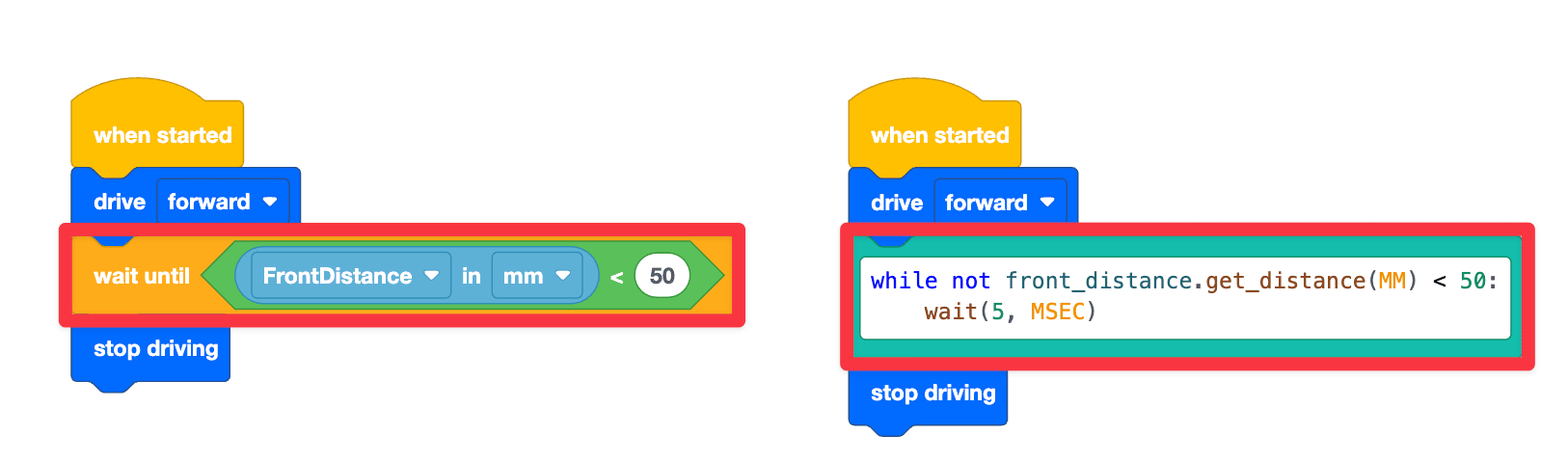
También vio un proyecto de ejemplo en el que el robot VR avanzará hasta que la distancia informada sea inferior a 50 milímetros (mm) de un objeto. Entonces, el robot VR se detendrá. El proyecto de la derecha muestra los comandos Python correspondientes dentro de un bloque Switch. El comando, aunque no front_distance.get_distance(MM) < 50, le dice al robot que verifique si la distancia informada es inferior a 50 MM de un objeto.
La siguiente línea de código con sangría, wait (5, MSEC), detiene el código durante 5 milisegundos. El comando que comprueba si la distancia informada es inferior a 50 MM desde un objeto esperará 5 MS antes de volver a comprobar la condición.
Seleccione el botón Siguiente para continuar con el resto de esta lección.