
![]() Lehrer-Toolbox
-
Der Zweck dieser Lesung
Lehrer-Toolbox
-
Der Zweck dieser Lesung
Dieses STEM-LABOR konzentriert sich auf die Programmierung des Roboters, um auf die erfassten Bedingungen zu reagieren. Diese erste Lesung soll die Idee von Bedingungen, booleschen (WAHREN oder FALSCHEN) Bedingungen und den Nutzen der Einbeziehung dieser Programmierungsstrukturen in ein Projekt vorstellen. Die Schüler sollten erkennen, dass die bedingte Programmierung die Reaktion des Roboters auf seine Umgebung verbessert.
Während er einen Roboter beobachtet, scheint er Entscheidungen über sein eigenes Verhalten zu treffen, aber innerhalb der Programmierung überprüft er die Bedingungen und ergreift geeignete Maßnahmen. Die Schüler könnten überlegen, wie Bedingungen ihre eigenen informierten Entscheidungen beeinflussen.
Entscheidung treffen: Soll ich einen Regenschirm mitnehmen?
Aktueller Zustand: Es wird wahrscheinlich regnen (WAHR).
Entscheidung: Regenschirm mitnehmen.

Entscheidungsfindung
Auf ihrer grundlegendsten Ebene werden Programme geschrieben, um einfache Verhaltenssequenzen zu erreichen. Zum Beispiel möchten Sie vielleicht, dass Ihr Roboter vorwärts fährt und auch einige Kurven macht, um ein Ziel zu erreichen. Aber was ist, wenn Sie möchten, dass Ihr Roboter auf den richtigen Zeitpunkt wartet, um vorwärts zu fahren und seine Route abzuschließen? Das würde eine Programmierung mit bedingten Anweisungen erfordern. Sie würden eine bedingte Anweisung verwenden, um zu definieren, was der "richtige Zeitpunkt für den Start" in Ihrem Projekt ist. Vielleicht ist der "richtige Zeitpunkt", nachdem eine Taste gedrückt wurde oder wenn ein Sensor einen bestimmten Pegel erkennt und dann mit der Fahrt beginnt. Wenn Sie das Verhalten des Roboters beobachten, scheint es, als würde er entscheiden, wann er mit dem Fahren beginnen soll, aber es liegt daran, dass Sie die Bedingung für den Beginn der Fahrt festgelegt haben.
Bedingte Anweisungen sind leistungsstarke Programmieranweisungen, die eine boolesche Bedingung (WAHR oder FALSCH) verwenden. Mit dem gleichen Beispielszenario wie oben könnten Sie Ihren Roboter so programmieren, dass er wiederholt überprüft, ob sein Gehirnbildschirm gedrückt ist, und dann vorwärts fährt. Die bedingte Anweisung in diesem Projekt kann etwas Ähnliches lauten wie: "Wenn der Bildschirm feststellt, dass er gedrückt wird (WAHR), führen Sie die Fahrsequenz aus." Diese Aussage erwähnt kein Verhalten, wenn die Bedingung FALSCH ist (der Bildschirm wird nicht gedrückt), so dass der Roboter keine Maßnahmen ergreift, wenn er FALSCH ist. Bedingte Anweisungen ermöglichen es Ihnen, Projekte zu entwickeln, bei denen sich der Roboter je nach dem, was er spürt, unterschiedlich verhält. Weitere Informationen zur Booleschen Logik finden Sie hier.
Wenn im folgenden Beispiel der Bildschirm des Gehirns gedrückt wird (WAHR), fährt der Roboter vorwärts. Wenn der Bildschirm des Gehirns nicht gedrückt wird (FALSCH), stoppt der Roboter die Fahrt. Dies zeigt, dass der Roboter nur vorwärts fährt, wenn der Bildschirm des Gehirns gedrückt wird, andernfalls stoppt der Roboter.
// Start project code
int main() {
// Initialisierung der Roboterkonfiguration. NICHT ENTFERNEN!
vexcodeInit();
while (true) {
if (Brain.Screen.pressing()) {
Drivetrain.drive(forward);
}
else {
Drivetrain.stop();
}
}
}
![]() Lehrertipps
-
Verwenden der automatischen Vervollständigung
Lehrertipps
-
Verwenden der automatischen Vervollständigung
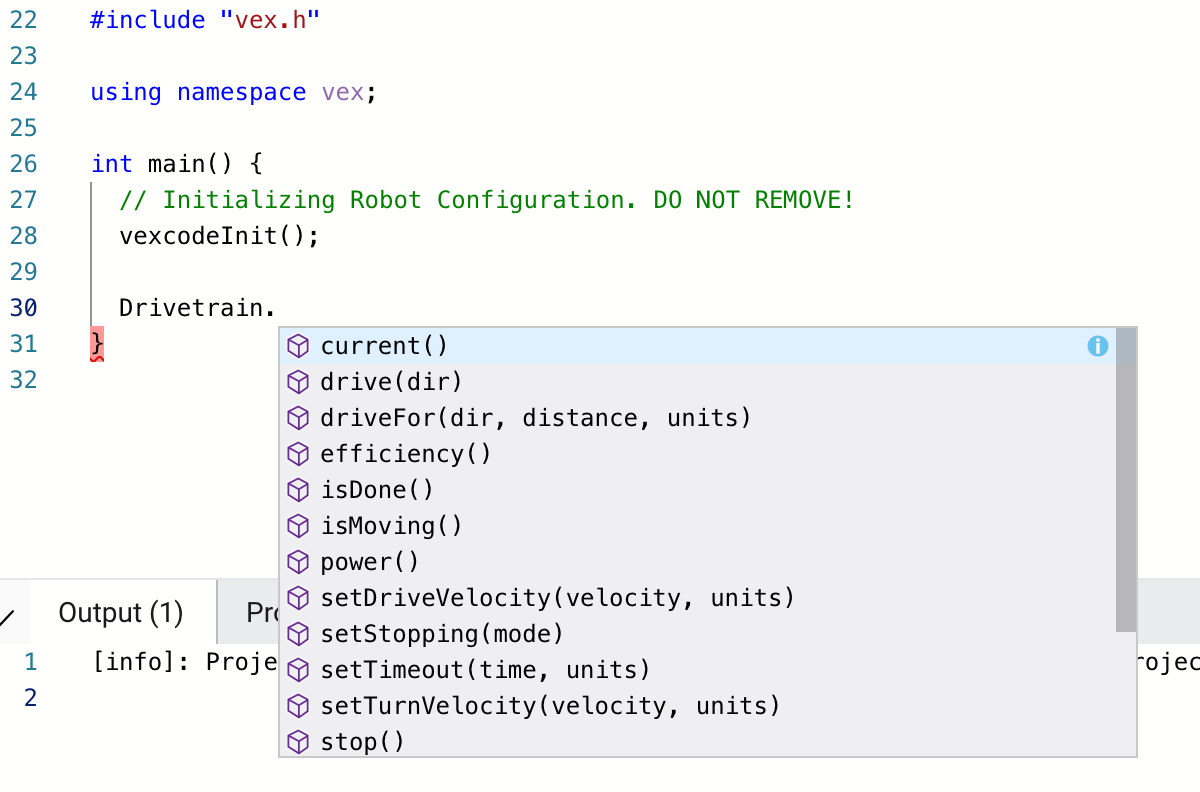
Die automatische Vervollständigung ist eine Funktion in VEXcode V5, die den Rest des Befehls vorhersagt, den Sie eingeben. Ermutigen Sie die Schüler, während sie in VEXcode V5 arbeiten, die Autovervollständigungsfunktion zu verwenden, um bei der Syntax zu helfen. Möglicherweise bemerken Sie eine Autovervollständigungsfunktion, wenn Sie mit der Eingabe der Anweisung beginnen. Verwenden Sie die Tasten "Auf" und "Ab", um den gewünschten Namen auszuwählen, und drücken Sie dann "Tab" oder (Enter/Return) auf Ihrer Tastatur, um die Auswahl zu treffen. Weitere Informationen zu dieser Funktion finden Sie in den C++ -Artikeln.
![]() Erweitern Sie Ihr Lernen
Erweitern Sie Ihr Lernen
Um diese Aktivität zu erweitern, bitten Sie Ihre Schüler, sich in Teams zusammenzuschließen und eine Skizze eines Labyrinths zu erstellen, das ein anderes Team ausfüllen kann. Das Labyrinth sollte mindestens drei bis fünf bedingte Aussagen erfordern. Fahren Sie zum Beispiel vorwärts, bis es eine Wand gibt. Biegen Sie dann links ab. Die Schüler sollten eine Lösung für das Labyrinth in Form eines Flussdiagramms schreiben. Die Schüler sollten dann Labyrinthe mit einem anderen Team tauschen, das wiederum eine Lösung für das Labyrinth in Form eines Flussdiagramms erstellen sollte. Die beiden Teams sollten dann die Antworten vergleichen, um zu sehen, wie eng sie zusammenpassen.
Um diese Aktivität mit Online- oder Handyspielen in Verbindung zu bringen, bitten Sie Ihre Schüler, das Ziel ihres Lieblingsspiels/ihrer Lieblings-App zu beschreiben. Lassen Sie die Schüler dann ein Flussdiagramm erstellen, das die ersten zehn Ja/Nein- oder Richtig/Falsch-Entscheidungen beschreibt, denen sie in ihrem Spiel folgen.