
![]() Caja de herramientas para maestros
: el propósito de esta lectura
Caja de herramientas para maestros
: el propósito de esta lectura
Este laboratorio STEM se centra en programar el robot para que responda a las condiciones que detecta. Esta primera lectura pretende introducir la idea de condicionales, condiciones booleanas (VERDADERAS o FALSAS) y el beneficio de incluir estas estructuras de programación dentro de un proyecto. Los estudiantes deben comenzar a reconocer que incluir programación condicional mejora la forma en que el robot responde a su entorno.
Mientras observa a un robot, puede parecer que está tomando decisiones sobre su propio comportamiento, pero dentro de la programación, está verificando las condiciones y tomando medidas de manera apropiada. Los estudiantes podrían considerar cómo las condiciones influyen en sus propias decisiones informadas.
Decisión a tomar: ¿Debo llevar un paraguas?
Estado actual: Es probable que llueva (VERDADERO).
Decisión: Tome un paraguas.
 Rutas
Rutas Toma de decisiones
En su nivel más básico, los programas están escritos para lograr secuencias simples de comportamiento. Por ejemplo, es posible que desee que su robot avance y también haga algunos giros para llegar a un destino. Pero, ¿qué pasa si quieres que tu robot espere el momento adecuado para comenzar a conducir hacia adelante y completar su ruta? Eso requeriría programación con declaraciones condicionales. Usarías una declaración condicional para definir cuál es el "momento adecuado para comenzar" dentro de tu proyecto. Tal vez el "momento adecuado" es después de pulsar un botón o cuando un sensor detecta un nivel específico y luego comienza a funcionar. Cuando observa el comportamiento del robot, parecerá que está decidiendo cuándo comenzar a conducir, pero es porque establece la condición para cuándo debe comenzar a conducir.
Las sentencias condicionales son potentes sentencias de programación que utilizan una condición booleana (VERDADERA o FALSA). Usando el mismo escenario de ejemplo que el anterior, podría programar su robot para verificar repetidamente si su pantalla cerebral está pulsada y avanzar cuando lo esté. La declaración condicional en ese proyecto puede leer algo similar a "Si la pantalla detecta que está pulsada (TRUE), ejecute la secuencia de conducción". Esta afirmación no menciona ningún comportamiento si la condición es FALSA (la pantalla no está pulsada), por lo que el robot no realiza ninguna acción cuando es FALSA. Las declaraciones condicionales le permiten desarrollar proyectos en los que el robot se comporta de manera diferente dependiendo de lo que siente. Para obtener más información sobre la lógica booleana, haga clic aquí.
En el siguiente ejemplo, si se pulsa la pantalla del cerebro (TRUE), el robot avanzará. Si no se pulsa la pantalla del Cerebro (FALSE) el robot dejará de conducir. Esto muestra que el robot solo avanza cuando se presiona la pantalla del cerebro; de lo contrario, el robot se detiene.
// Begin project code
int main() {
// Initializing Robot Configuration. ¡NO LO RETIRE!
vexcodeInit();
while (true) {
if (Brain.Screen.pressing()) {
Drivetrain.drive(forward);
}
else {
Drivetrain.stop();
}
}
}
![]() Consejos para maestros
-
Uso de autocompletar
Consejos para maestros
-
Uso de autocompletar
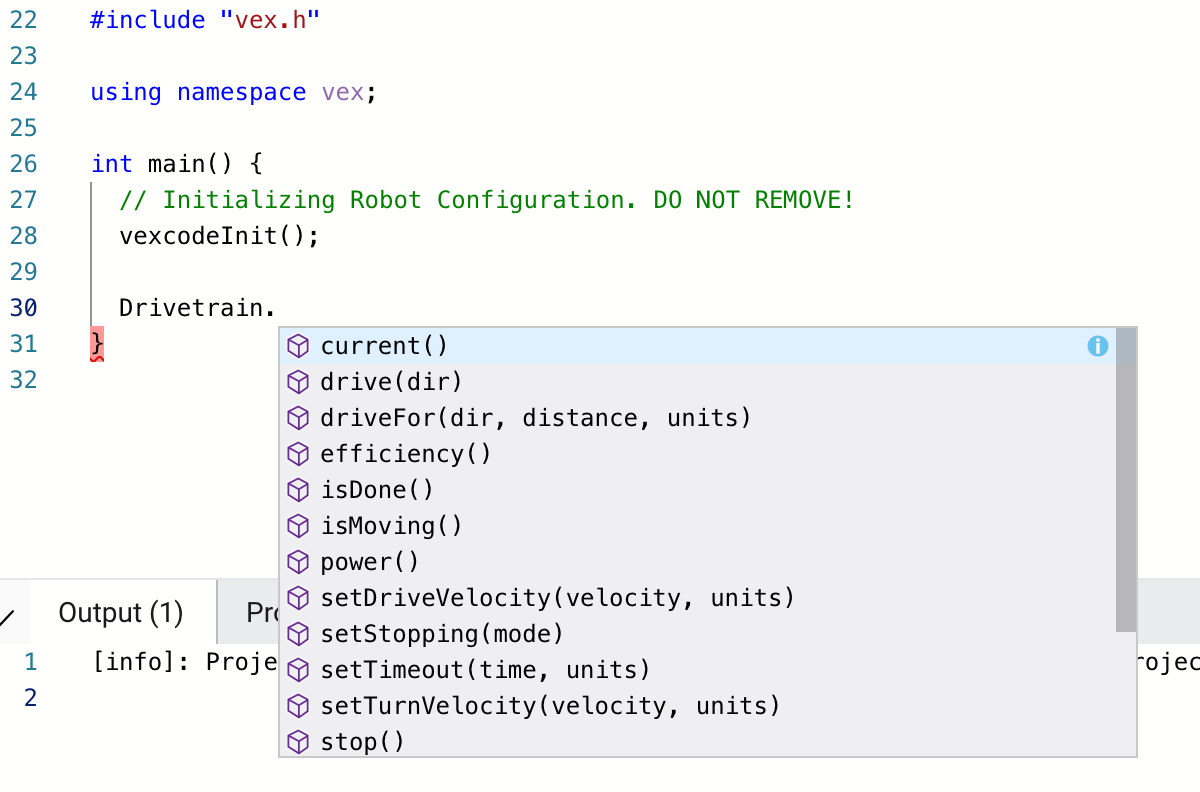
Autocompletar es una función en VEXcode V5 que predice el resto del comando que está escribiendo. Mientras los estudiantes trabajan en VEXcode V5, anímelos a usar la función de autocompletar para ayudar con la sintaxis. Puede notar una función de autocompletar cuando comience a escribir la instrucción. Use las teclas "Arriba" y "Abajo" para seleccionar el nombre que desee, luego presione "Tab" o (Intro/Retorno) en su teclado para hacer la selección. Para obtener más información sobre esta función, consulta los artículos de C++.
![]() Amplíe su aprendizaje
Amplíe su aprendizaje
Para ampliar esta actividad, pida a sus alumnos que formen equipos y creen un boceto de un laberinto para que otro equipo lo complete. El laberinto debe requerir un mínimo de tres a cinco declaraciones condicionales. Por ejemplo, continúe hacia adelante hasta que haya una pared. A continuación, gire a la izquierda. Los estudiantes deben escribir una solución al laberinto en forma de diagrama de flujo. Luego, los estudiantes deben intercambiar laberintos con otro equipo que, a su vez, debe crear una solución al laberinto en forma de diagrama de flujo. Luego, los dos equipos deben comparar las respuestas para ver qué tan cerca coinciden.
Para relacionar esta actividad con juegos en línea o móviles, pida a sus estudiantes que describan el objetivo de su juego/aplicación favorita. Luego, pida a los estudiantes que creen un diagrama de flujo que describa las primeras diez decisiones de sí/no o de verdadero/falso que siguen en su juego.