
Aprender
Antes de que pueda conducir el Clawbot en el Speed Stack Challenge, primero debe aprender a usar el programa Driver Control en el cerebro para conducir el Clawbot.
Programa de control del conductor
Hay un programa ya integrado en el cerebro que le permite conducir el Clawbot usando el controlador sin tener que escribir ningún código.
Vea este vídeo para obtener información sobre el uso del programa Control del conductor en el cerebro.
Abrir resumen de la lección
Google Doc / .docx / .pdf
Cada una de las cuatro opciones de control del conductor le permite controlar el robot utilizando los joysticks de diferentes maneras.
| Configuración | Descripción | Controles del joystick |
|---|---|---|
 |
Arcada izquierda Conduce el robot hacia adelante, atrás, izquierda y derecha usando el joystick izquierdo. |
 |
 |
Arcada derecha Conduce el robot hacia adelante, atrás, izquierda y derecha usando el joystick derecho. |
 |
 |
Split Arcade Conduce el robot hacia la izquierda y hacia la derecha con el joystick izquierdo, y hacia adelante y hacia atrás con el joystick derecho. |
 |
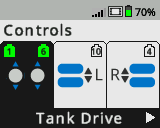 |
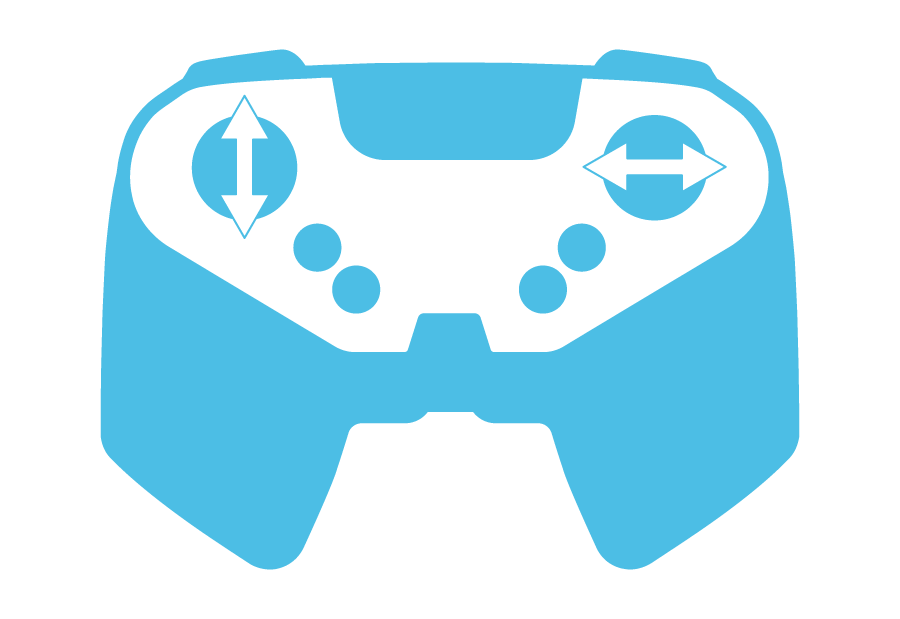
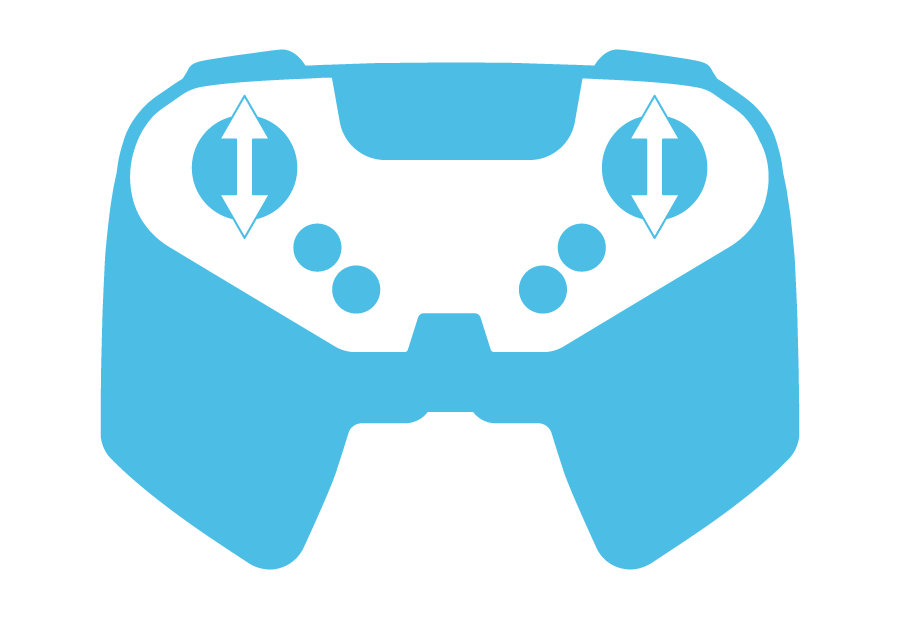
Transmisión del tanque Accione el motor izquierdo del robot con el joystick izquierdo y el motor derecho del robot con el joystick derecho. |
 |
Compruebe su comprensión
Antes de pasar a la sección Práctica, asegúrese de comprender los conceptos cubiertos en esta página respondiendo las preguntas del documento a continuación en su cuaderno de ingeniería.
Compruebe sus preguntas de comprensión Google Doc / .docx / .pdf
Selecciona Siguiente > para practicar cómo conducir tu robot para apilar y anotar cubos en el campo.