
Apprendre
Avant de pouvoir conduire le Clawbot dans le Speed Stack Challenge, vous devez d'abord apprendre à utiliser le programme de contrôle du conducteur sur le cerveau pour conduire le Clawbot.
Programme de contrôle du conducteur
Il existe déjà un programme intégré dans le cerveau qui vous permet de piloter le Clawbot à l'aide du contrôleur sans avoir à écrire de code.
Regardez cette vidéo pour en savoir plus sur l'utilisation du programme de contrôle du conducteur sur le cerveau.
Ouvrir le résumé de la leçon
Google Doc / .docx / .pdf
Chacune des quatre options de contrôle du conducteur vous permet de contrôler le robot à l'aide des joysticks de différentes manières.
| Configuration | Description | Commandes du joystick |
|---|---|---|
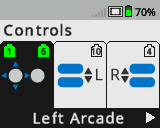 |
Arcade gauche Conduisez le robot vers l'avant, l'arrière, la gauche et la droite à l'aide du joystick gauche. |
 |
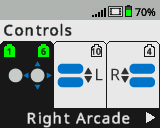 |
Arcade droite Conduisez le robot vers l'avant, l'arrière, la gauche et la droite à l'aide du joystick droit. |
 |
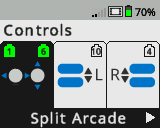 |
Split Arcade Conduisez le robot à gauche et à droite à l'aide du joystick gauche, et avancez et reculez à l'aide du joystick droit. |
 |
 |
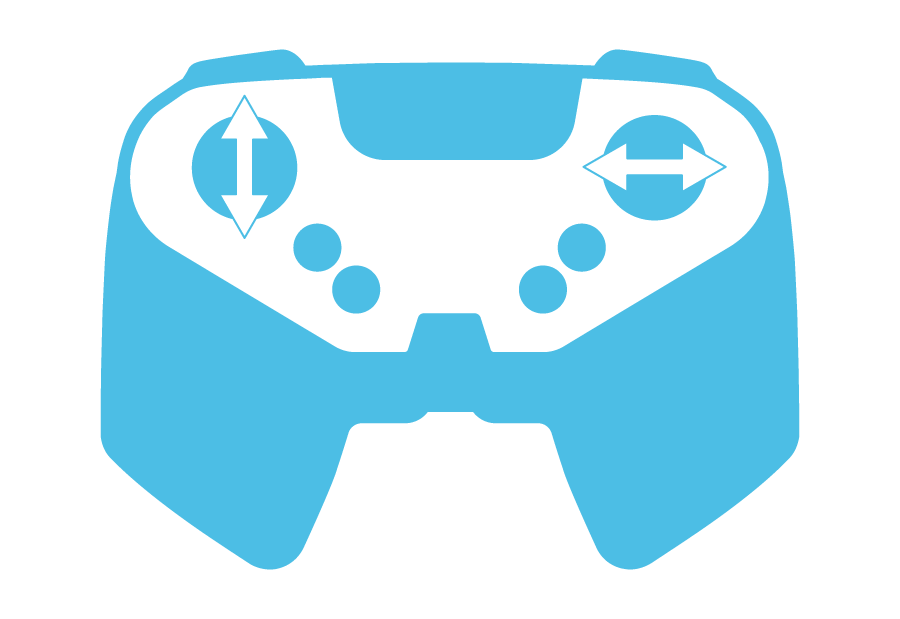
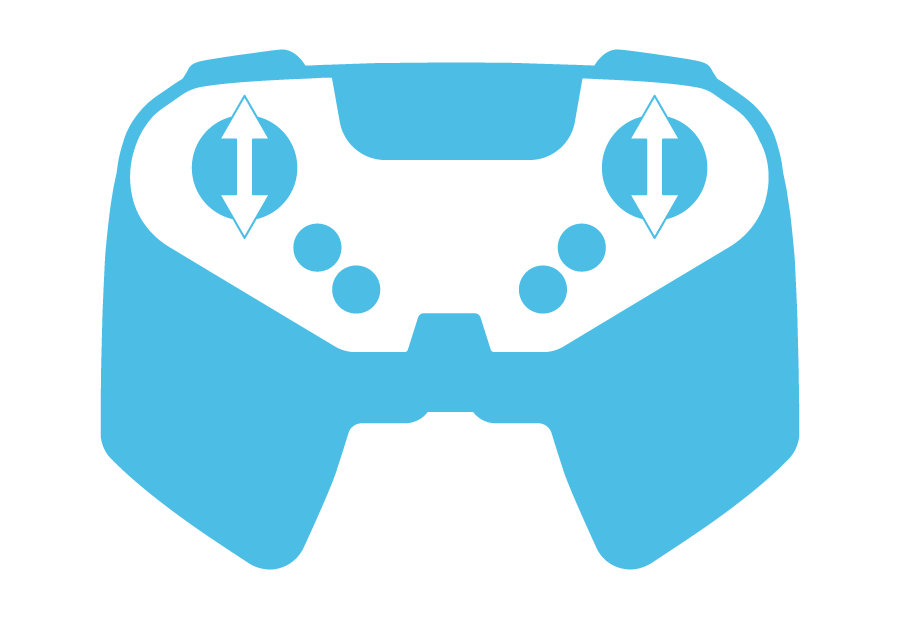
Entraînement de réservoir Conduisez le moteur gauche du robot à l'aide du joystick gauche et le moteur droit du robot à l'aide du joystick droit. |
 |
Vérifiez votre compréhension
Avant de passer à la section Pratique, assurez-vous de comprendre les concepts abordés sur cette page en répondant aux questions du document ci-dessous dans votre cahier d'ingénierie.
Vérifiez votre compréhension des questions Google Doc / .docx / .pdf
Sélectionnez Suivant > pour vous entraîner à conduire votre robot pour empiler et marquer des cubes sur le terrain.