
Mokytis
Kad galėtumėte vairuoti „Clawbot“ „Speed Stack Challenge“, pirmiausia turite išmokti naudoti „Driver Control“ programą smegenyse, kad vairuotumėte „Clawbot“.
Vairuotojo valdymo programa
Smegenyse jau yra įdiegta programa, leidžianti valdyti „Clawbot“ naudojant valdiklį, nereikia rašyti jokio kodo.
Peržiūrėkite šį vaizdo įrašą, kad sužinotumėte apie Driver Control programos naudojimą smegenyse.
Atviros pamokos santrauka Doc .docx
Kiekviena iš keturių vairuotojo valdymo parinkčių leidžia skirtingais būdais valdyti robotą naudojant vairasvirtes.
| Konfigūracija | apibūdinimas |
Vairasvirtės valdikliai |
|---|---|---|
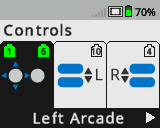 |
Kairė arkada Važiuokite robotu pirmyn, atbuline eiga, kairėn ir dešinėn naudodami kairįjį vairasvirtę. |
 |
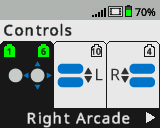 |
Dešinė arkada Važiuokite robotu pirmyn, atbuline eiga, kairėn ir dešinėn naudodami dešinįjį vairasvirtę. |
 |
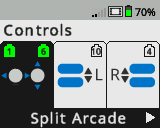 |
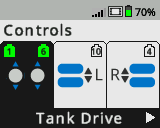
Split Arcade Važiuokite robotu kairėn ir dešinėn, naudodami kairįjį vairasvirtę, o pirmyn ir atgal – dešine vairasvirte. |
 |
 |
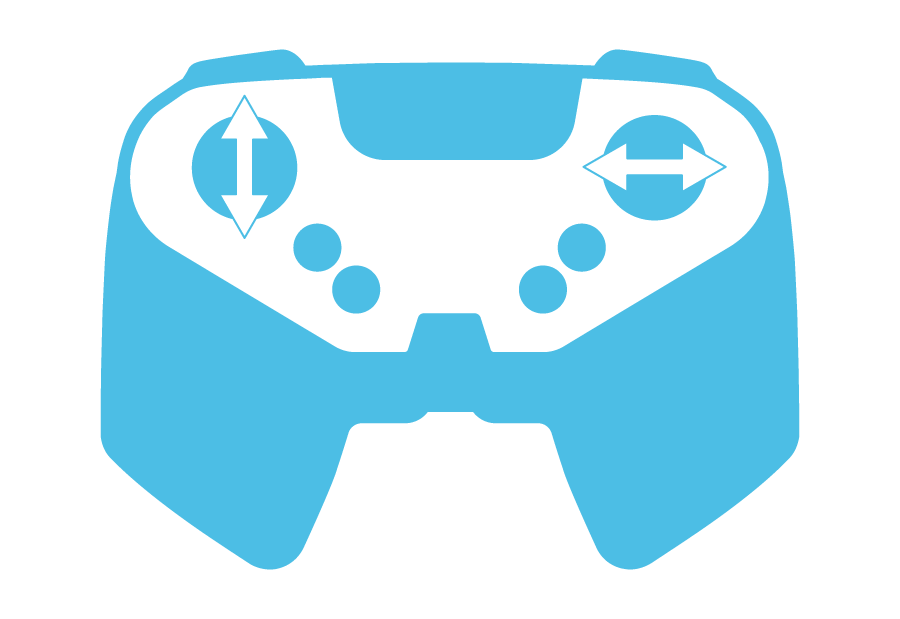
Tanko pavara Kairiuoju roboto varikliu valdykite kairįjį vairasvirtę, o dešinįjį – dešinįjį vairasvirtę. |
 |
Patikrinkite savo supratimą
Prieš pereidami prie praktikos skyriaus, įsitikinkite, kad suprantate šiame puslapyje aprašytas sąvokas, atsakydami į toliau pateikto dokumento klausimus savo inžinerijos bloknote.
Patikrinkite savo supratimo klausimus Google Doc
Pasirinkite Kitas > , kad išmoktumėte vairuoti savo robotą, kad būtų galima sukrauti ir surinkti kubelius lauke.