
學習
在 Speed Stack Challenge 中駕駛 Clawbot 之前,您首先需要學習如何使用 Brain 上的驅動程式控製程式來驅動 Clawbot。
駕駛員控製程式
Brain 中已經內建了一個程序,可讓您使用控制器驅動 Clawbot,而無需編寫任何程式碼。
觀看此視頻,了解如何使用 Brain 上的駕駛員控製程式。
公開課總結 Google Doc / .docx / .pdf
四個驅動程式控制選項中的每一個都允許您以不同的方式使用操縱桿控制機器人。
| 配置 | 描述 |
搖桿控制 |
|---|---|---|
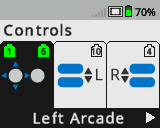 |
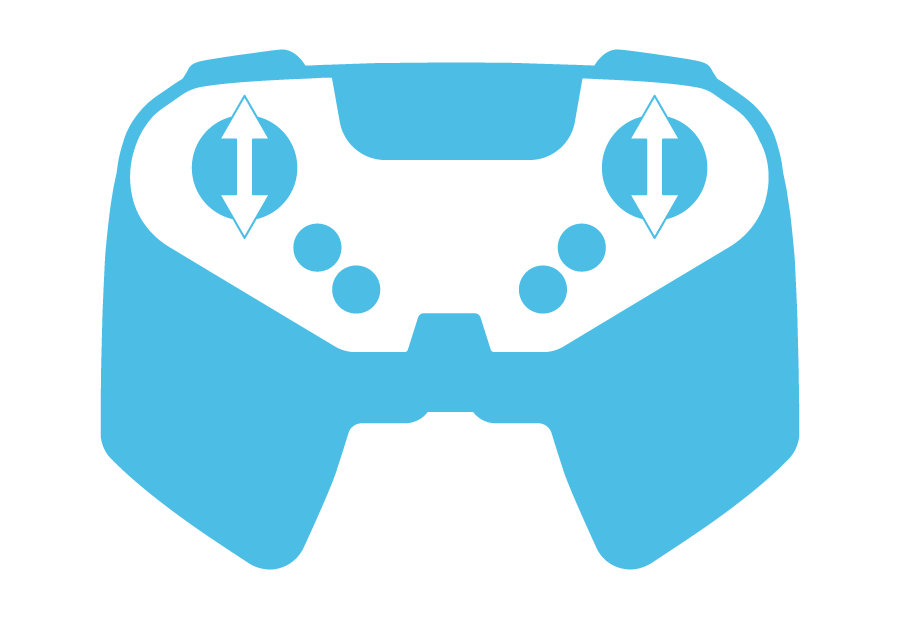
左街機 使用左操縱桿驅動機器人前進、後退、向左和向右。 |
 |
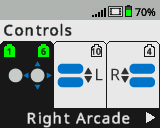 |
右側街機 使用右操縱桿驅動機器人前進、後退、向左和向右。 |
 |
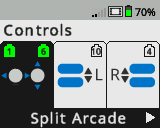 |
分割街機 使用左操縱桿左右驅動機器人,使用右操縱桿前進和後退。 |
 |
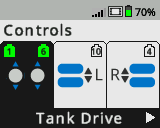 |
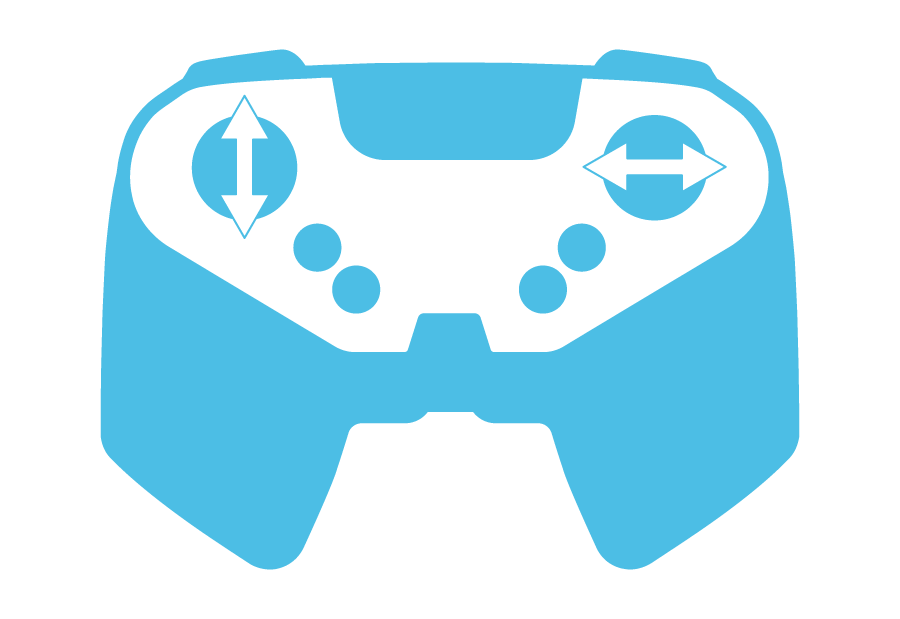
坦克駕駛 使用左操縱桿驅動機器人的左電機,使用右操縱桿驅動機器人的右電機。 |
 |