
学习
在 Speed Stack Challenge 中驾驶 Clawbot 之前,您首先需要学习如何使用 Brain 上的驱动程序控制程序来驱动 Clawbot。
驾驶员控制程序
Brain 中已经内置了一个程序,允许您使用控制器驱动 Clawbot,而无需编写任何代码。
观看此视频,了解如何使用 Brain 上的驾驶员控制程序。
公开课总结 Google Doc / .docx / .pdf
四个驱动程序控制选项中的每一个都允许您以不同的方式使用操纵杆控制机器人。
| 配置 | 描述 |
操纵杆控制 |
|---|---|---|
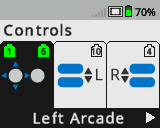 |
左街机 使用左操纵杆驱动机器人前进、后退、向左和向右。 |
 |
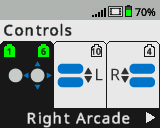 |
右侧街机 使用右操纵杆驱动机器人前进、后退、向左和向右。 |
 |
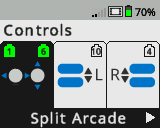 |
分割街机 使用左操纵杆左右驱动机器人,使用右操纵杆前进和后退。 |
 |
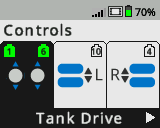 |
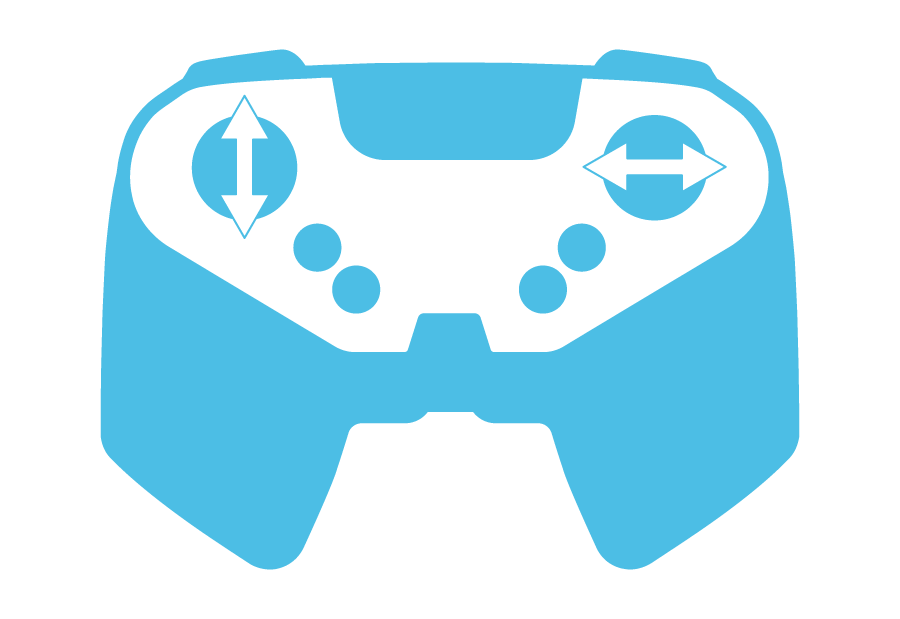
坦克驾驶 使用左操纵杆驱动机器人的左电机,使用右操纵杆驱动机器人的右电机。 |
 |