
Uczyć się
Zanim będziesz mógł prowadzić Clawbota w wyzwaniu Speed Stack, musisz najpierw nauczyć się korzystać z programu Driver Control w Brain, aby prowadzić Clawbota.
Program kontroli kierowców
W Brain jest już wbudowany program, który pozwala sterować Clawbotem za pomocą Kontrolera, bez konieczności pisania jakiegokolwiek kodu.
Obejrzyj ten film, aby dowiedzieć się, jak korzystać z programu Driver Control w urządzeniu Brain.
Otwarte podsumowanie lekcji Dokument Google / .docx / .pdf
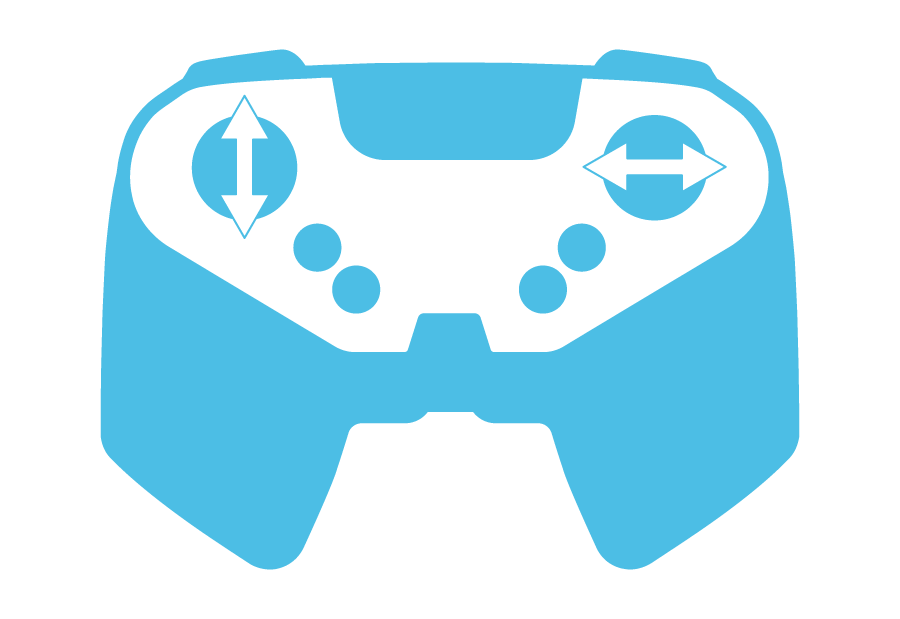
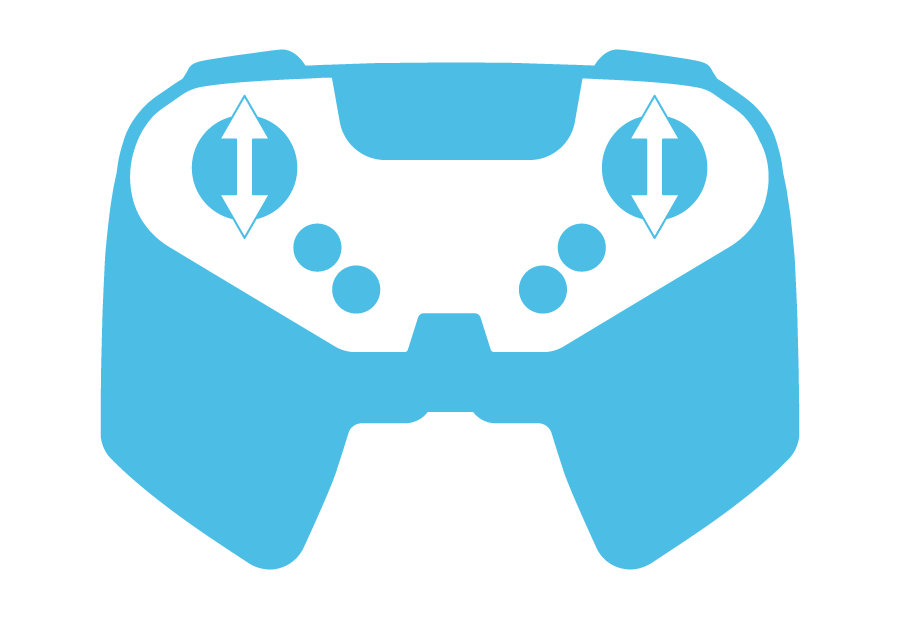
Każda z czterech opcji sterowania przez sterownik umożliwia sterowanie robotem za pomocą joysticków na różne sposoby.
| Konfiguracja | Opis |
Sterowanie joystickiem |
|---|---|---|
 |
Lewa Arkada Prowadź robota do przodu, do tyłu, w lewo i w prawo, używając lewego joysticka. |
 |
 |
Prawa Arkada Prowadź robota do przodu, do tyłu, w lewo i w prawo, używając prawego joysticka. |
 |
 |
Podzielona arkada Prowadź robota w lewo i w prawo za pomocą lewego joysticka, a do przodu i do tyłu za pomocą prawego joysticka. |
 |
 |
Napęd czołgu Napędzaj lewy silnik robota za pomocą lewego joysticka, a prawy silnik robota za pomocą prawego joysticka. |
 |
Sprawdź czy dobrze zrozumiałeś
Zanim przejdziesz do sekcji Praktyka, upewnij się, że rozumiesz pojęcia omówione na tej stronie, odpowiadając na pytania w poniższym dokumencie w swoim notatniku inżynierskim.
Sprawdź, czy rozumiesz pytania Dokument Google / .docx / .pdf
Wybierz Dalej > , aby poćwiczyć prowadzenie robota w układaniu stosów i zdobywaniu punktów na boisku.