
Mempelajari
Sebelum Anda dapat mengendarai Clawbot dalam Speed Stack Challenge, Anda harus terlebih dahulu mempelajari cara menggunakan program Driver Control di Brain untuk mengendarai Clawbot.
Program Kontrol Pengemudi
Ada program yang sudah tertanam di Brain yang memungkinkan Anda mengendalikan Clawbot menggunakan Controller tanpa harus menulis kode apa pun.
Tonton video ini untuk mempelajari tentang penggunaan program Kontrol Pengemudi di Otak.
Ringkasan Pelajaran Terbuka
Google Doc / .docx / .pdf
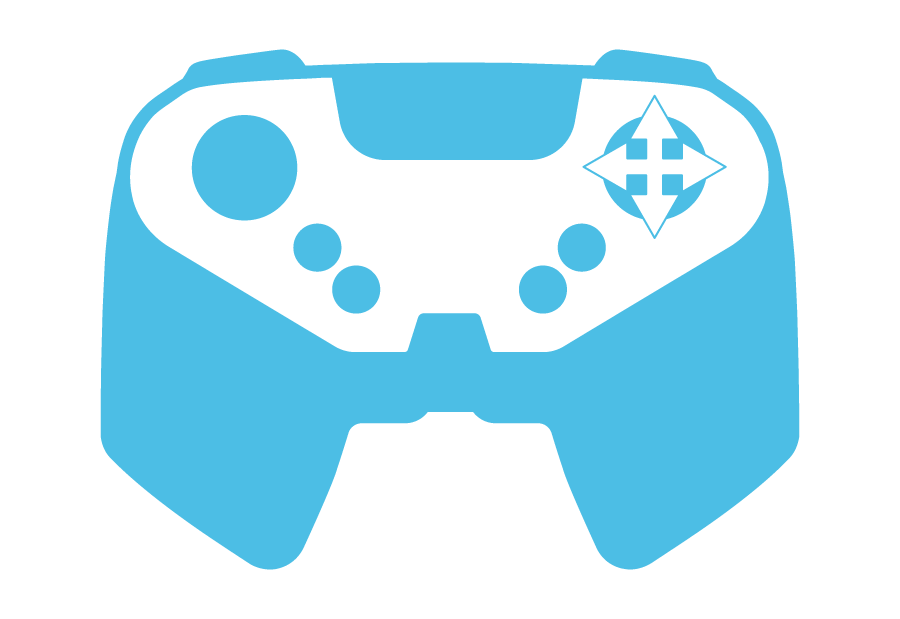
Masing-masing dari empat pilihan kontrol pengemudi memungkinkan Anda mengendalikan robot menggunakan joystick dengan cara yang berbeda.
| Konfigurasi | Keterangan | Kontrol Joystick |
|---|---|---|
 |
Arcade Kiri Gerakkan robot maju, mundur, kiri, dan kanan, semuanya menggunakan joystick kiri. |
 |
 |
Arcade Kanan Gerakkan robot maju, mundur, ke kiri, dan ke kanan, semuanya menggunakan joystick kanan. |
 |
 |
Arcade Terpisah Gerakkan robot ke kiri dan kanan menggunakan joystick kiri, dan maju dan mundur menggunakan joystick kanan. |
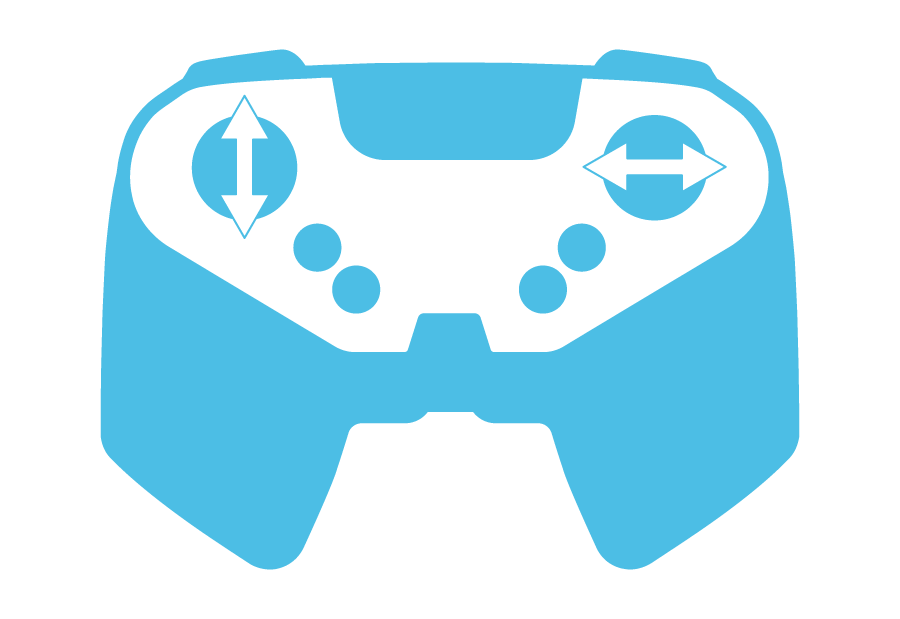 |
 |
Penggerak Tangki Kendarai motor kiri robot menggunakan joystick kiri, dan motor kanan robot menggunakan joystick kanan. |
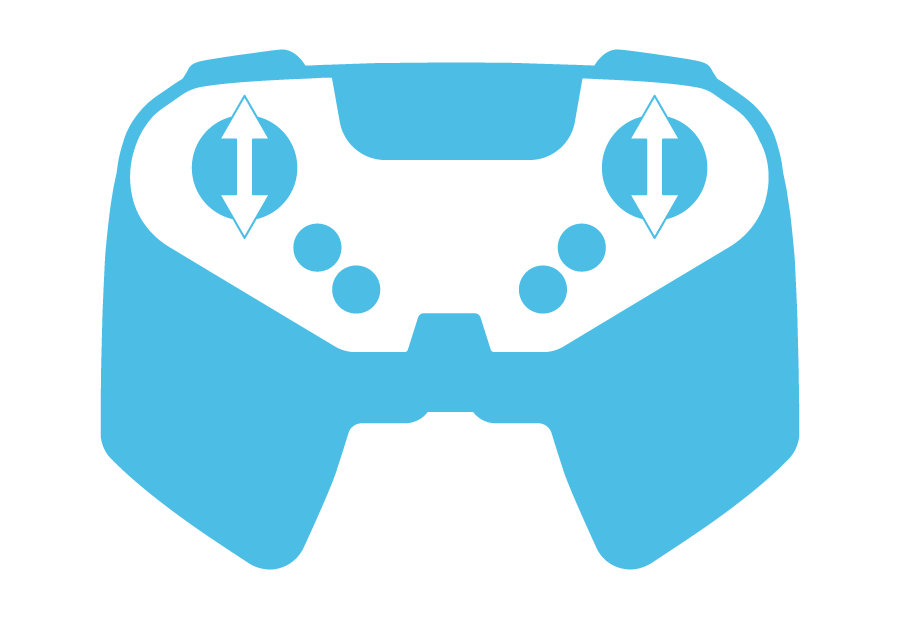 |
Periksa Pemahaman Anda
Sebelum melanjutkan ke bagian Praktik, pastikan Anda memahami konsep yang dibahas di halaman ini dengan menjawab pertanyaan dalam dokumen di bawah ini di buku catatan teknik Anda.
Pertanyaan Periksa Pemahaman Anda Google Doc / .docx / .pdf
Pilih Berikutnya > untuk berlatih mengendalikan robot Anda untuk menumpuk dan memberi skor pada kubus di Lapangan.