
学ぶ
Speed Stack Challenge で Clawbot を運転する前に、まず Brain の Driver Control プログラムを使用して Clawbot を運転する方法を学ぶ必要があります。
ドライバー制御プログラム
Brain にはすでにプログラムが組み込まれており、コードを書かずにコントローラーを使用して Clawbot を駆動できるようになります。
Brain での Driver Control プログラムの使用方法については、このビデオをご覧ください。
レッスンの概要を開く Google ドキュメント / .docx / .pdf
4 つのドライバー制御オプションのそれぞれにより、ジョイスティックをさまざまな方法で使用してロボットを制御できます。
| 構成 | 説明 |
ジョイスティックコントロール |
|---|---|---|
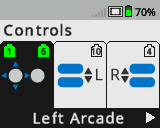 |
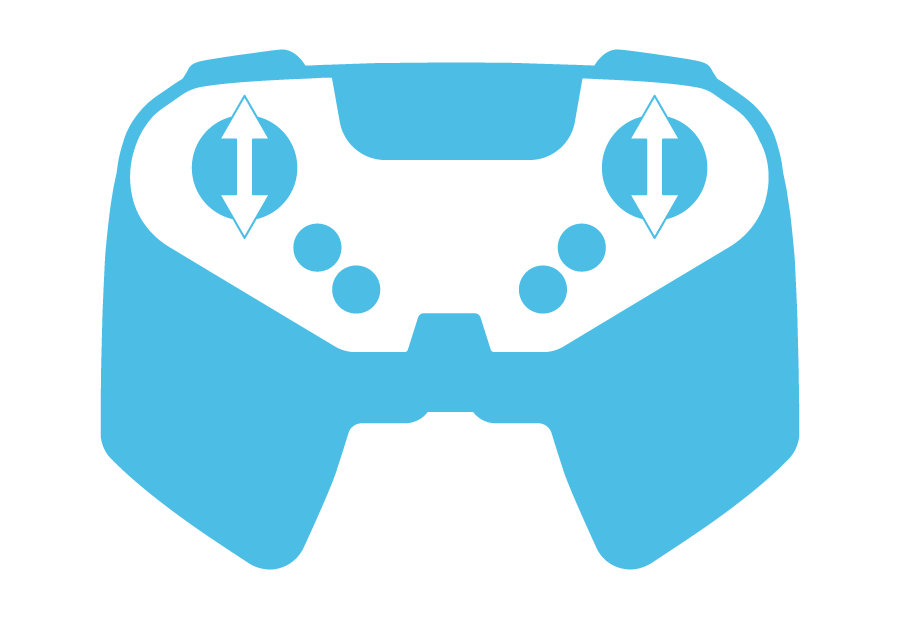
レフトアーケード ロボットを前進、後進、左、右に操作するには、すべて左側のジョイスティックを使用します。 |
 |
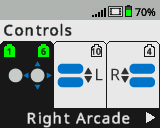 |
右のアーケード 右のジョイスティックを使用して、ロボットを前進、後進、左、右に操作します。 |
 |
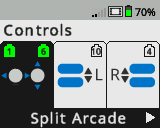 |
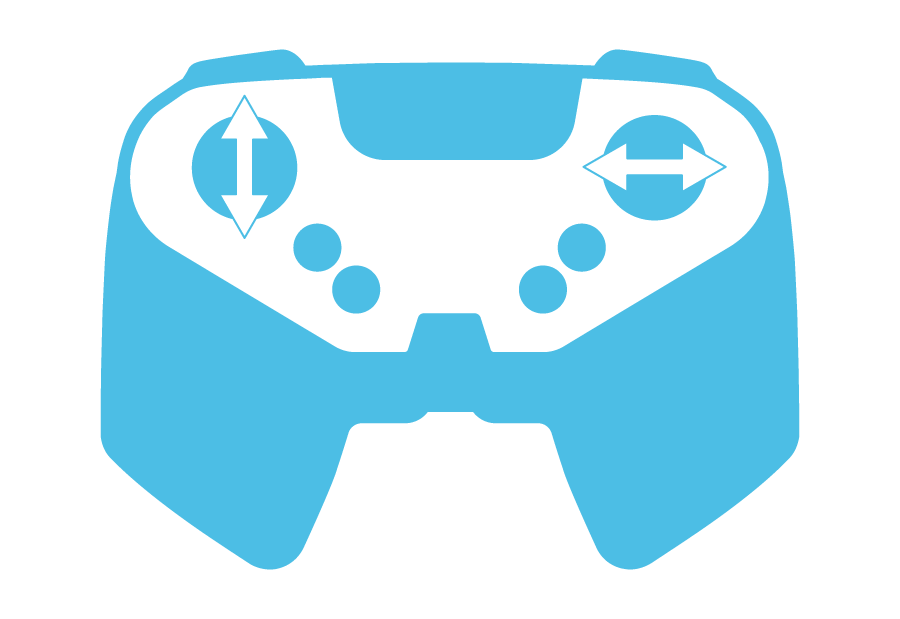
スプリットアーケード 左のジョイスティックを使用してロボットを左右に動かし、右のジョイスティックを使用して前進または後進させます。 |
 |
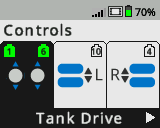 |
タンクドライブ 左側のジョイスティックを使用してロボットの左側のモーターを駆動し、右側のジョイスティックを使用してロボットの右側のモーターを駆動します。 |
 |
理解を確認してください
「実践」セクションに進む前に、エンジニアリング ノートブックにある以下の文書の質問に答えて、このページで説明されている概念を確実に理解してください。
理解度を確認するための質問 Google ドキュメント / .docx / .pdf
次へ > を選択して、ロボットを操作してフィールド上でキューブを積み上げて得点する練習をします。