


Construyendo comportamientos para una rutina autónoma
Las competiciones de robótica VEX requieren la planificación de una rutina autónoma para el partido de habilidades de programación de 60 segundos del desafío de habilidades de robot y para el período autónomo de 15 segundos del juego del año actual. Programar el robot para que funcione de forma autónoma requiere dividir lo que el robot necesita hacer en código programable basado en el comportamiento.
A continuación se muestran algunos comportamientos típicos de un robot de competición VEX:
-
Conducir hacia adelante y hacia atrás
-
Girando a derecha e izquierda
-
Agarrando un objeto del juego
-
Colocar con precisión un objeto del juego.
-
Ordenar entre diferentes objetos del juego
Una vez que haya creado las instrucciones básicas para este tipo de comportamientos, ejecutar una rutina autónoma exitosa simplemente significa planificar el orden de estas acciones.
![]() Motivar el debate
-
Comportamientos automatizados
Motivar el debate
-
Comportamientos automatizados
Muestre una imagen del campo de la Competencia de Robótica VEX para el juego del año actual o puedes usar este de la adquisición de la torre del concurso de robótica VEX 2019-2020.
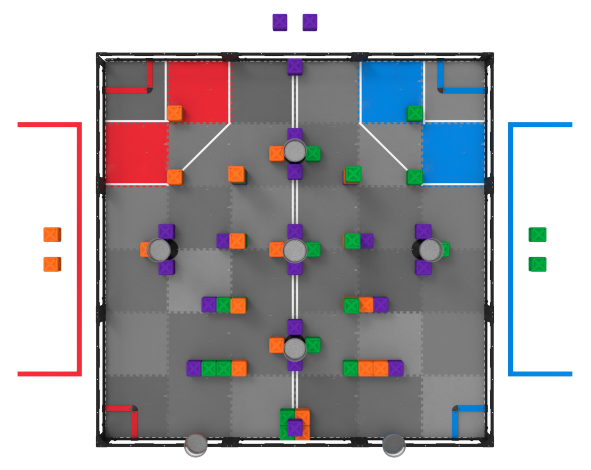
Comience proporcionando a los estudiantes un objetivo para planificar, pero asegúrese de que sea apropiado para su nivel de experiencia. Es posible que aún no se haya discutido el manipulador y los sensores del robot, por lo que el objetivo se puede obtener solo con movimientos básicos. Por ejemplo, pídales que planifiquen cómo moverse desde la esquina roja superior en el campo de arriba hasta el cubo morado inferior derecho sin tocar nada más en el campo.
P: Si necesitabas moverte desde la parte superior izquierda esquina a la esquina inferior derecha, ¿cuál es su primer paso para planificar eso?
A: Las respuestas pueden variar, pero deben estar relacionadas con dividir la tarea en comportamientos programables más pequeños o comportamientos que correspondan a las instrucciones de VEXcode V5.
P: ¿Cuál es el primer comportamiento del robot?
A: Las respuestas podrían ser girar en una dirección o seguir adelante. Todas las respuestas aceptables deben corresponder a instrucciones únicas.
P: ¿Qué necesitarías hacer para programar turnos? o conducir? ¿Qué medidas necesitarías?
A: Para un programa autónomo sin sensores, serían necesarias las distancias de giro y conducción precisas.
![]() Amplíe su aprendizaje
-
Sketch y Psuedocódigo
Amplíe su aprendizaje
-
Sketch y Psuedocódigo
Para ampliar esta actividad, pida a sus alumnos que dibujen un campo de desafío (real o creado) a escala y luego escriban un pseudocódigo (Google / .docx / .pdf< /2> ) para un programa autónomo de 15 segundos. El pseudocódigo no se ha introducido en esta práctica de laboratorio pero, al planificar con comportamientos simples, los estudiantes ya han comenzado a practicar la escritura de pseudocódigo. No es necesario presentar la práctica de escribir pseudocódigo, como se describe en el enlace, pero el plan de los estudiantes debe incluir una descomposición del problema en pasos lo suficientemente básicos como para ser considerado pseudocódigo.