


การสร้างพฤติกรรมสำหรับกิจวัตรอัตโนมัติ
การแข่งขันหุ่นยนต์ VEX จำเป็นต้องมีการวางแผนกิจวัตรอัตโนมัติสำหรับการจับคู่ทักษะการเขียนโปรแกรม 60 วินาทีของ Robot Skills Challenge และสำหรับช่วงอิสระ 15 วินาทีของ เกมของปีปัจจุบัน การเขียนโปรแกรมหุ่นยนต์ให้ทำงานโดยอัตโนมัติจำเป็นต้องแจกแจงสิ่งที่หุ่นยนต์ต้องทำเป็นโค้ดตามพฤติกรรมที่ตั้งโปรแกรมได้
ต่อไปนี้เป็นพฤติกรรมทั่วไปบางประการสำหรับหุ่นยนต์แข่งขัน VEX:
-
การขับรถไปข้างหน้าและย้อนกลับ
-
เลี้ยวขวาและซ้าย
-
คว้าวัตถุเกม
-
วางวัตถุในเกมได้อย่างแม่นยำ
-
การเรียงลำดับระหว่างวัตถุในเกมที่แตกต่างกัน
เมื่อคุณสร้างคำแนะนำพื้นฐานสำหรับพฤติกรรมประเภทนี้แล้ว การดำเนินกิจวัตรอัตโนมัติให้ประสบความสำเร็จนั้นหมายถึงการวางแผนลำดับของการกระทำเหล่านี้!
![]() กระตุ้นการสนทนา
-
พฤติกรรมอัตโนมัติ
กระตุ้นการสนทนา
-
พฤติกรรมอัตโนมัติ
แสดงรูปภาพของสนามการแข่งขัน VEX Robotics สำหรับ เกมของปีปัจจุบัน หรือคุณสามารถใช้อันนี้จาก VEX Robotics Competition Tower Takeover ประจำปี 2019-2020 ก็ได้
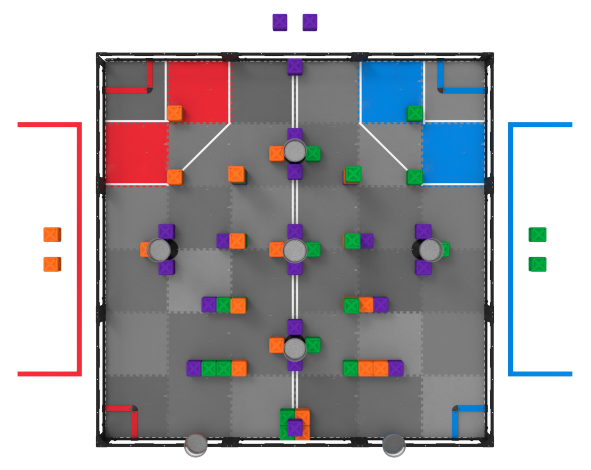
เริ่มต้นด้วยการให้วัตถุประสงค์ในการวางแผนแก่นักเรียน แต่ต้องแน่ใจว่าเหมาะสมกับระดับประสบการณ์ของพวกเขา หุ่นยนต์และเซ็นเซอร์ของหุ่นยนต์อาจยังไม่ได้มีการพูดคุยถึง ดังนั้น ควรรักษาวัตถุประสงค์ให้บรรลุได้ด้วยการเคลื่อนไหวขั้นพื้นฐานเท่านั้น ตัวอย่างเช่น ขอให้พวกเขาวางแผนว่าจะย้ายจากมุมสีแดงบนของช่องด้านบนไปยังลูกบาศก์สีม่วงล่างขวาโดยไม่ต้องสัมผัสสิ่งอื่นใดบนสนาม
ถาม: หากคุณต้องการย้ายจากด้านซ้ายบน มุมล่างขวา ขั้นตอนแรกของคุณในการวางแผนคืออะไร?
A: คำตอบอาจแตกต่างกันไป แต่ควรเกี่ยวข้องกับการแบ่งงานออกเป็นพฤติกรรมที่ตั้งโปรแกรมได้เล็กๆ น้อยๆ หรือพฤติกรรมที่สอดคล้องกับคำสั่ง VEXcode V5
ถาม: พฤติกรรมแรกของหุ่นยนต์คืออะไร?
A: คำตอบอาจเป็นการเลี้ยวหรือขับไปข้างหน้า คำตอบที่ยอมรับได้ทั้งหมดควรสอดคล้องกับคำสั่งเดียว
ถาม: คุณต้องทำอะไรเพื่อตั้งโปรแกรมผลัดกัน หรือกำลังขับรถ? คุณต้องการการวัดอะไร?
A: สำหรับโปรแกรมอัตโนมัติที่ไม่มีเซ็นเซอร์ จำเป็นต้องมีระยะการเลี้ยวและการขับขี่ที่แม่นยำ
![]() ขยายการเรียนรู้ของคุณ
-
Sketch และ Psuedocode
ขยายการเรียนรู้ของคุณ
-
Sketch และ Psuedocode
หากต้องการขยายกิจกรรมนี้ ให้นักเรียนร่างขอบเขตความท้าทาย (ของจริงหรือที่สร้างขึ้น) เพื่อปรับขนาด แล้วเขียนโค้ดเทียม (Google / .docx / .pdf< /2> ) สำหรับโปรแกรมอัตโนมัติ 15 วินาที แล็บนี้ยังไม่มีการนำรหัสเทียมมาใช้ แต่ด้วยการวางแผนด้วยพฤติกรรมง่ายๆ นักเรียนจึงได้เริ่มฝึกเขียนรหัสเทียมแล้ว ไม่จำเป็นต้องฝึกการเขียนรหัสเทียมตามที่อธิบายไว้ในลิงก์ แต่แผนของนักเรียนควรรวมการแบ่งย่อยของปัญหาออกเป็นขั้นตอนพื้นฐานเพียงพอที่จะพิจารณารหัสเทียมได้