


培养自主习惯
VEX 机器人竞赛要求为机器人技能挑战赛的 60 秒编程技能和 当年比赛的 15 秒自主阶段规划一个自主程序。 对机器人进行编程以使其自主运行需要将机器人需要做的事情分解为可编程的基于行为的代码。
以下是 VEX 竞赛机器人的一些典型行为:
-
前进和后退
-
左转和右转
-
抓取游戏对象
-
精确放置游戏对象
-
不同游戏对象之间的排序
一旦您为这些类型的行为构建了基本指令,成功运行自主程序只需规划这些操作的顺序!
![]() 激励讨论
-
自动化行为
激励讨论
-
自动化行为
显示 VEX 机器人竞赛场地的图像,可以是 当前年度的比赛 ,也可以使用 2019-2020 VEX 机器人竞赛 Tower Takeover 中的这张图片。
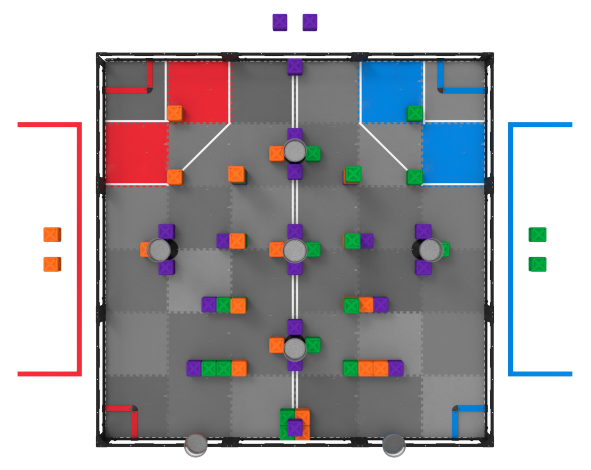
首先为学生提供一个规划目标,但要确保该目标适合他们的经验水平。 机器人的操纵器和传感器可能尚未讨论,因此,仅通过基本动作即可实现目标。 例如,让他们计划如何从上方场地中的顶部红色角落移动到右下方的紫色立方体,而不触碰场地上的任何其他东西。
问: 如果您需要从左上角移动到右下角,您计划的第一步是什么?
答: 答案可能有所不同,但应该与将任务分解为更小的可编程行为或与
VEXcode V5 指令相对应的行为有关。
问: 机器人的第一个行为是什么?
答: 答案可能是向某个方向转弯,也可能是向前行驶。
可接受的答案都应该对应单个指令。
问: 您需要做什么来编程转弯或驾驶?
您需要哪些测量?
答: 对于没有传感器的自动程序,精确的转弯和行驶距离是必要的。