


![]() 激發討論
-
自動行為
激發討論
-
自動行為
顯示 VEX 機器人競賽場地的圖像,用於 今年的比賽 ,或者您可以使用 2019-2020 VEX 機器人競賽塔接管中的圖像。
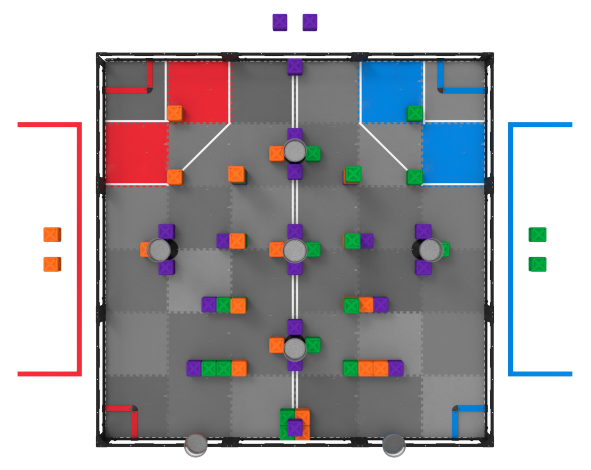
首先為學生提供一個計劃目標,但確保該目標適合他們的經驗水平。 機器人的操縱器和感測器可能尚未討論,因此,僅透過基本運動即可實現目標。 例如,要求他們計劃如何從上方區域的頂部紅色角落移動到右下紫色立方體,而不接觸區域上的其他任何東西。
Q: 如果您需要從左上角移動到右下角,您計劃的第一步是什麼?
A: 答案可能會有所不同,但應該與將任務分解為更小的可編程行為或與 VEXcode V5 指令相對應的行為有關。
問: 機器人的第一個行為是什麼?
A: 答案可以是向一個方向轉彎或向前行駛。 可接受的答案應全部對應於單一指令。
Q: 您需要做什麼來對轉彎或駕駛進行程式設計? 您需要什麼測量數據?
A: 對於沒有感測器的自主程序,精確的轉彎和行駛距離是必要的。