


Viselkedések kialakítása egy autonóm rutinhoz
A VEX Robotics Versenyek autonóm rutin tervezését igénylik a Robot Skills Challenge 60 másodperces programozási készségmérkőzésén, és a aktuális évi játék 15 másodperces autonóm időszakában. A robot önálló működésre való programozása megköveteli, hogy a robotnak mit kell tennie programozható viselkedés alapú kódba.
Íme néhány tipikus viselkedés a VEX versenyrobotoknál:
-
Előre-hátra vezetés
-
Jobbra-balra fordulás
-
Játéktárgy megragadása
-
Egy játéktárgy pontos elhelyezése
-
Válogatás a különböző játéktárgyak között
Miután elkészítette az alapvető utasításokat az ilyen típusú viselkedésekhez, egy sikeres autonóm rutin futtatása egyszerűen azt jelenti, hogy meg kell tervezni a műveletek sorrendjét!
![]() Motiválja a beszélgetést
-
Automatizált viselkedések
Motiválja a beszélgetést
-
Automatizált viselkedések
Jelenítse meg a VEX Robotics Competition mezőjének képét, vagy az aktuális év játékának értékéhez, vagy használhatja ezt a 2019-2020-as VEX Robotics Competition Tower átvételéből.
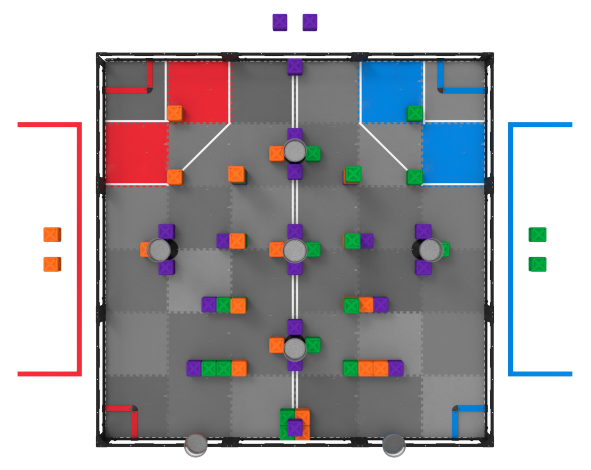
Kezdje azzal, hogy a hallgatóknak célt tűzzön ki a tervezés során, de gondoskodjon arról, hogy az megfeleljen a tapasztalati szintjüknek. Lehet, hogy a robot manipulátoráról és érzékelőiről még nem esett szó, így az objektívet csak alapvető mozdulatokkal kell elérhetővé tenni. Például kérje meg őket, hogy tervezzék meg, hogyan léphetnek át a fenti mező piros felső sarkából a jobb alsó lila kockába anélkül, hogy bármi mást is megérintene a mezőn.
K: Ha a bal felső sarokból a jobb alsó sarokba kellett lépnie, mi az első lépése ennek megtervezésében?
A: A válaszok eltérőek lehetnek, de vonatkozniuk kell a feladat kisebb programozható viselkedésekre, vagy a VEXcode V5 utasításainak megfelelő viselkedésekre.
K: Mi a robot első viselkedése?
A: A válaszok vagy egy irányba fordulás vagy előrehajtás lehet. Az elfogadható válaszoknak egyetlen utasításnak kell megfelelniük.
K: Mit kell tennie a kanyarodás vagy a vezetés programozásához? Milyen mérésekre lenne szükség?
A: Egy szenzorok nélküli autonóm programhoz pontos fordulási és vezetési távolságra lenne szükség.
![]() Bővítse tanulását
és psuedocode-val
Bővítse tanulását
és psuedocode-val
A tevékenység kibővítéséhez kérje meg diákjait, hogy vázoljanak fel egy kihívásmezőt (valós vagy létrehozott) méretezéshez, majd írjanak pszeudokódot (Google / .docx / .pdf ) egy 15 másodperces autonóm programhoz. A pszeudokódot ebben a laborban még nem vezették be, de egyszerű viselkedésekkel tervezve a diákok már elkezdték gyakorolni a pszeudokód írását. A linkben leírt pszeudokód írási gyakorlatot nem kell bemutatni, de a tanulók tervében tartalmaznia kell a probléma lebontását olyan alapvető lépésekre, amelyek pszeudokódnak tekinthetők.