

De plus en plus
6 Cours
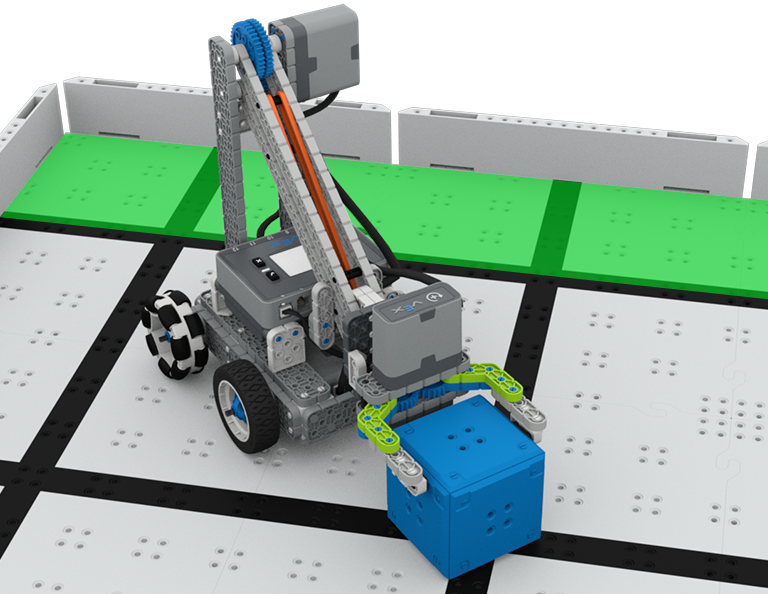
Dans cette unité, vous découvrirez comment concevoir un Clawbot pour collecter, ramasser et déplacer des cubes d'un côté à l'autre du terrain, dans le cadre de la compétition Up and Over !
Visitez le portail de l'enseignant pour accéder au matériel de soutien et aux vidéos destinés aux enseignants sur le contenu et l'animation des leçons Up and Over.

Leçon 1 : Introduction
Dans cette leçon, vous serez initié à la compétition Up and Over, configurez la batterie et le contrôleur, préparez-vous à coder et à construire le Clawbot.
Leçon 2 : Conception de griffes
Dans cette leçon, vous apprendrez ce qu'est une griffe, comment une griffe efficace fonctionne et comment le dépistage peut bénéficier aux conceptions et à la stratégie de votre équipe. Ensuite, vous appliquerez ce que vous avez appris dans le défi Grab and Go.
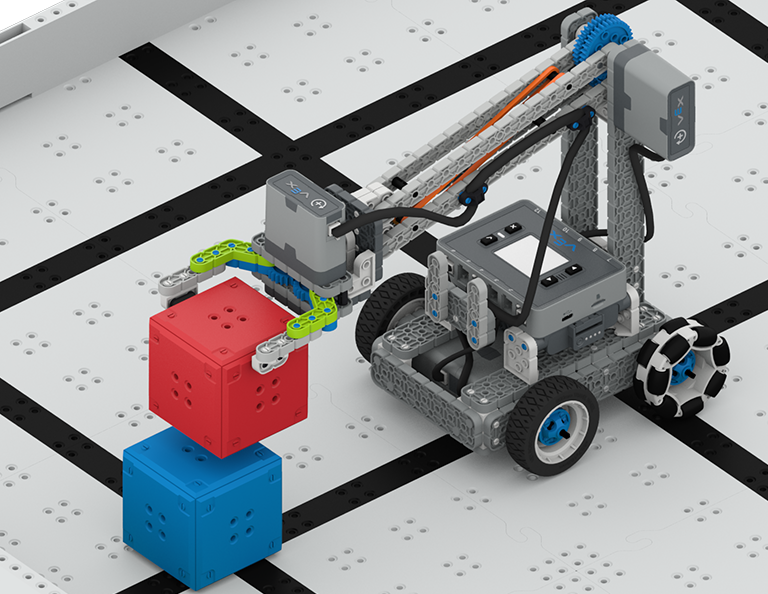
Leçon 3 : Conception des bras
Dans cette leçon, vous en apprendrez plus sur les différents éléments des bras robotiques, leur fonctionnement et ce qui rend une conception de bras efficace, afin d'empiler autant de cubes que possible en une minute dans le défi Stacked Up.
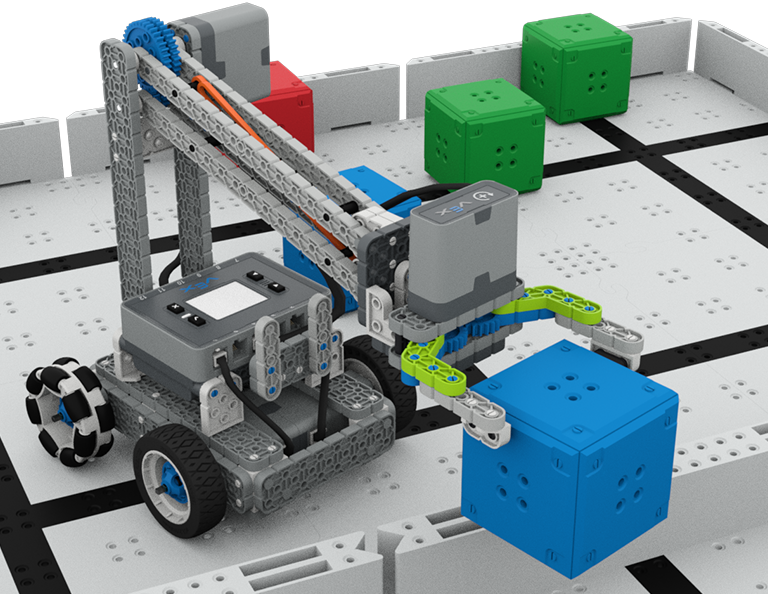
Leçon 4 : Groupes moteurs
Dans cette leçon, vous apprendrez ce que sont les groupes moteurs, comment ils peuvent être utiles et comment configurer les groupes moteurs dans VEXcode IQ afin d'itérer sur votre robot pour terminer le défi Up and Over.
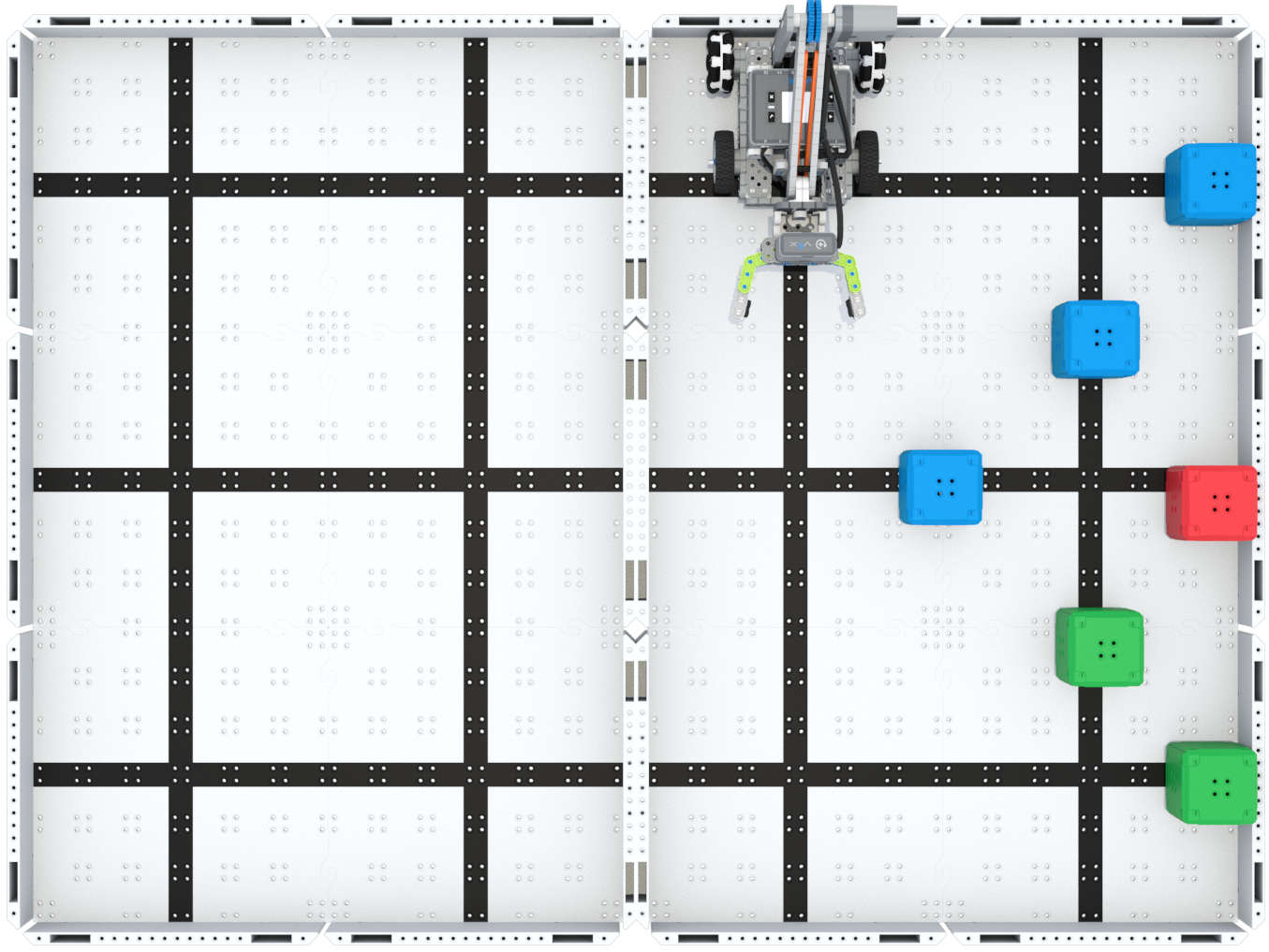
Leçon 5 : Concurrence accrue
Dans cette leçon, vous appliquerez les enseignements des leçons précédentes pour participer à la compétition Up and Over !

Leçon 6 : Conclusion
Dans cette leçon, vous réfléchirez à l'unité et identifierez les liens entre ce que vous avez fait et une carrière STEM.