
Répondez aux questions suivantes dans votre cahier d'ingénierie lorsque vous concevez votre projet.
-
Quel type de danse robotique allez-vous créer ? Expliquez avec des détails.
-
Quels types de boucles utiliserez-vous et pourquoi ?
-
Quelles étapes suivrez-vous pour tester la danse ? Expliquez avec des détails.
Pour vous aider à planifier, cliquez sur l'un des liens suivants pour obtenir quelques exemples de mouvements de danse que vous pourriez inclure dans la danse du Clawbot (Google Doc / .docx / .pdf) .
![]() Conseils à l'enseignant
Conseils à l'enseignant
Une façon de rendre cette compétition de danse plus excitante est de demander aux élèves de comparer leurs plans pour obtenir des commentaires et de l'inspiration. Si le temps le permet, encouragez les élèves à partager leurs projets.
-
Les réponses varieront, mais les élèves peuvent noter qu'ils veulent que leur robot tourne ou lève le bras du robot en l'air.
-
Les boucles répétées et/ou éternelles peuvent être utilisées pour répéter des blocs spécifiques ou des mouvements de danse. Les boucles sont utilisées pour simplifier les projets et les rendre plus efficaces.
-
Les élèves peuvent d'abord écrire leurs idées pour la danse en utilisant un pseudo-code. Ils peuvent ensuite commencer à utiliser des blocs pour programmer la façon dont ils veulent que le robot se déplace. Une fois le projet terminé, ils peuvent l'exécuter et enregistrer leurs observations dans leur cahier d'ingénierie avant d'apporter des améliorations. Toutes les améliorations doivent également être enregistrées dans le cahier d'ingénierie.
Suivez les étapes ci-dessous lorsque vous créez votre projet :
- Planifiez la danse à l'aide de dessins et d' un pseudocode (Google Doc / .docx / .pdf).
- Utilisez le pseudocode que vous avez créé pour développer votre projet à l'aide de VEXcode V5.
-
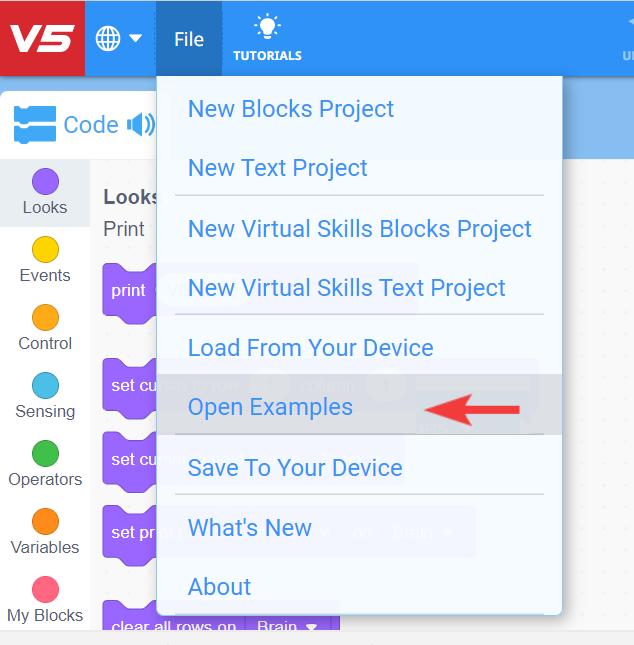
Ouvrez le projet d'exemple Clawbot (groupe motopropulseur 2 moteurs, pas de gyroscope).
-
Enregistrez votre projet sous GrooveMachine.

- Exécutez votre projet pour le tester souvent et répétez-le en utilisant ce que vous avez appris de vos tests.
- Partagez votre projet final avec votre professeur.
![]() Boîte à outils de l'enseignant
Boîte à outils de l'enseignant
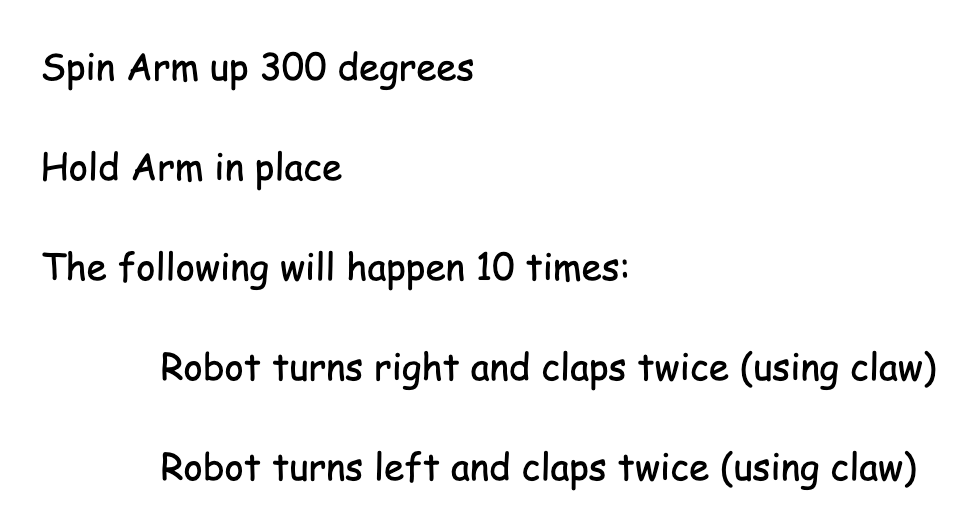
Ce qui suit est un exemple de ce à quoi pourrait ressembler le pseudocode des élèves. N'oubliez pas que vous pouvez suggérer aux élèves de fournir un pseudo-code plus détaillé. Un exemple pourrait être « ouvrir et fermer la griffe » au lieu de simplement « applaudir ».
Si vous souhaitez noter leur pseudocode, voici une rubrique pour le faire (Google Doc / .docx / .pdf). Si vous prévoyez d'utiliser cette rubrique ou toute autre rubrique, il est recommandé de la montrer aux élèves ou de leur en donner une copie avant de commencer à travailler.
Si vous rencontrez des difficultés pour démarrer, consultez les éléments suivants dans VEXcode V5 :
-
Exemples de projets
-
Utilisation du tutoriel Boucles

- Versions précédentes de votre projet
- La fonctionnalité d'aide pour en savoir plus sur les blocs