रोबो रैली चैलेंज
रोबो रैली चैलेंज
इस चुनौती में, आपको अपने रोबोट को अपने रेसकोर्स के साथ किसी अन्य व्यक्ति या टीम के कोर्स पर चलाना होगा! चुनौती को सफलतापूर्वक पूरा करने के लिए, टीमों को छात्रों या टीमों दोनों के आयामों और पैमानों का उपयोग करके नए संयुक्त पाठ्यक्रम का सही ढंग से मापित मानचित्र भी बनाना होगा। संयुक्त पाठ्यक्रम की प्रत्येक टीम के पास एक ड्राइवर होगा जो रोबोट को पूरे पाठ्यक्रम में ले जाएगा। जिस चालक वाली टीम सबसे तेजी से कोर्स पूरा करती है, वह जीत जाती है!
चुनौती नियम:
- रोबोट को फिनिश लाइन पर शुरू और समाप्त करना होगा।
- दोनों टीमें रोबोट ब्रेन परड्राइव प्रोग्रामउपयोग करेंगी।
- जब एक टीम सदस्य रोबोट को चला रहा हो, तो अन्य सदस्यों को यह सुनिश्चित करना चाहिए कि रोबोट रास्ते के किनारों से न टकराए या नियंत्रण न खो दे।
- समय रिकॉर्ड होने से पहले आप अभ्यास के तौर पर रोबोट को रेसकोर्स में एक बार चला सकते हैं।
- दोनों पाठ्यक्रमों के आयाम समान इकाइयों और पैमाने पर होने चाहिए।
- प्रत्येक टीम को संयुक्त रेसकोर्स के मानों के आधार पर मापों सहित एक नया सही पैमाने वाला मानचित्र पूरा करना होगा।
- जो भी टीम कम समय में समान कोर्स पूरा कर लेगी - वह जीत जाएगी!
- मस्ती करो!
![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
सुनिश्चित करें किप्रोग्राम चलाने से पहले प्रत्येक टीम के पासनियंत्रक ठीक सेहो
![]() शिक्षक टूलबॉक्स
शिक्षक टूलबॉक्स
संभावित समाधान में निम्नलिखित शामिल हो सकते हैं:
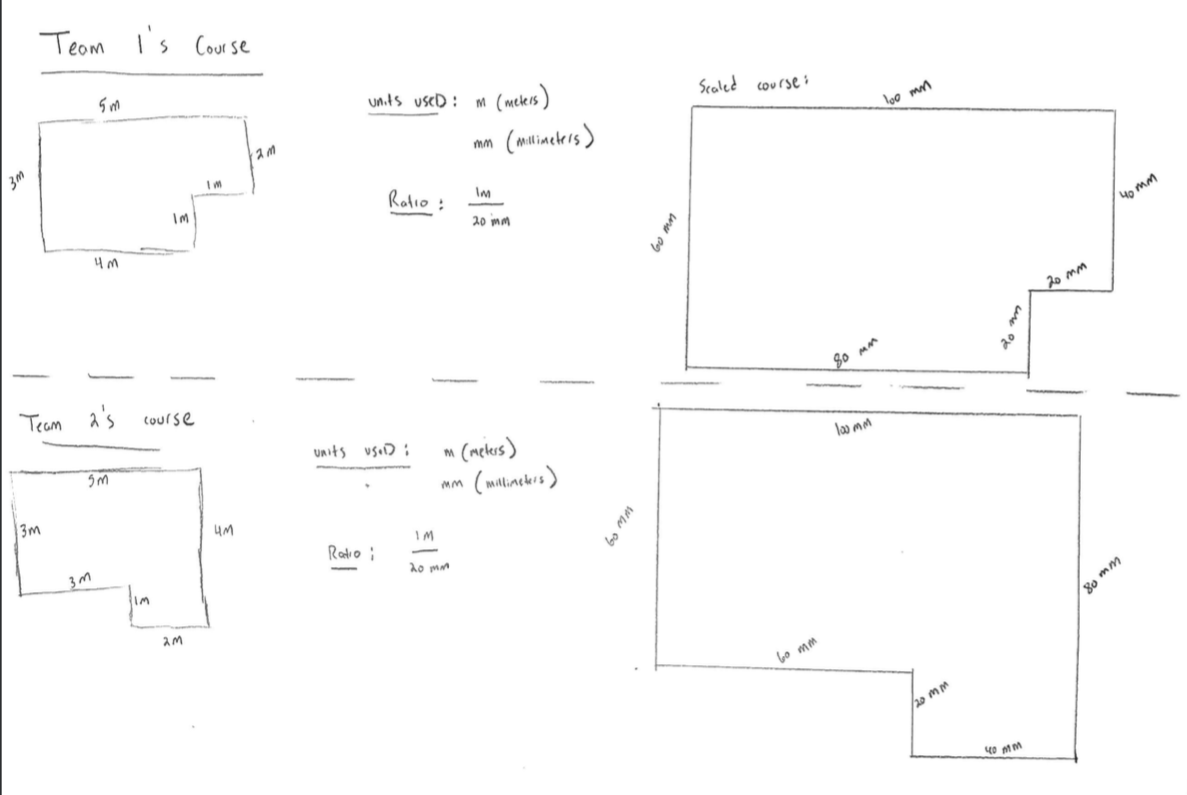
पृष्ठ का शीर्ष समूह या टीम के पाठ्यक्रम के वास्तविक आयाम दिखाता है। पृष्ठ के मध्य में यह दर्शाया गया है कि उन्होंने पैमाने के लिए कौन सी इकाइयों और अनुपात का उपयोग किया। यह महत्वपूर्ण है क्योंकि प्रत्येक समूह को यह सुनिश्चित करना होगा कि वे समान इकाइयों और पैमाने का उपयोग कर रहे हैं। यदि वे नहीं हैं, तो उन्हें आवश्यक परिवर्तन करने के लिए कुछ मिनट लेने की आवश्यकता होगी ताकि वे समान इकाइयों में हों और समान पैमाने का उपयोग करें।
पृष्ठ के दाईं ओर स्केल-डाउन पाठ्यक्रम आयाम दिखाए गए हैं।
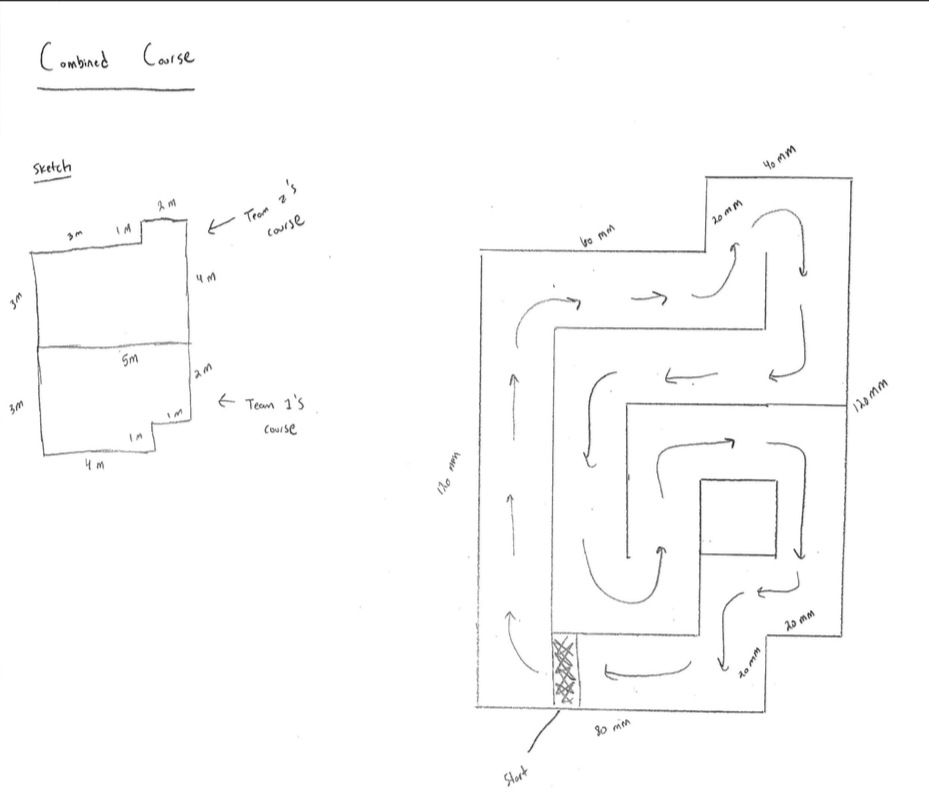
नीचे, संयुक्त पाठ्यक्रम दिखाता है कि दोनों समूहों ने अपने पाठ्यक्रमों को संयोजित करने का निर्णय कैसे लिया। उन्होंने निर्णय लिया कि चूंकि उन दोनों के पाठ्यक्रम का एक पक्ष 5 मीटर या 100 मिमी तक छोटा था, वे समूह या टीम 1 का पाठ्यक्रम तैयार करेंगे और फिर टीम या समूह 2 के पाठ्यक्रम को क्षैतिज रूप से पलट कर जोड़ देंगे, ताकि 100 मिमी पक्ष संयुक्त हो जाएं।
फिर समूहों ने छोटे आकार के स्पीडबोट के आकार का उपयोग करके डिजाइन किया कि रोबोट को तीर और सटीक माप का उपयोग करके पाठ्यक्रम को कैसे नेविगेट करना चाहिए।
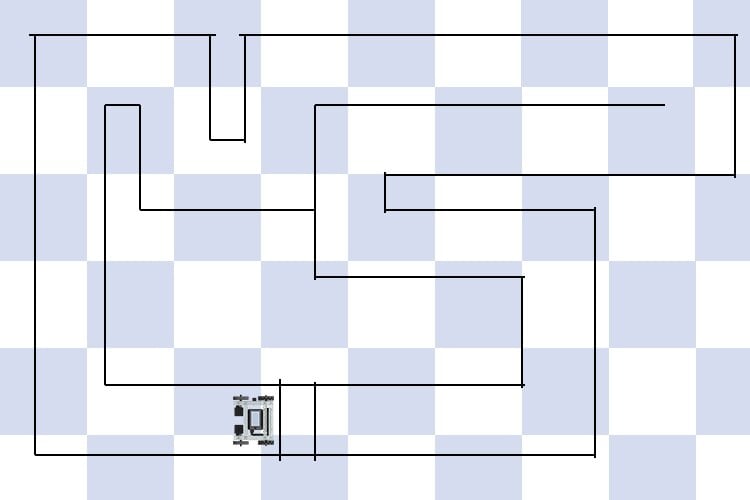
फिर छात्रों ने अपने चित्र को बड़ा किया ताकि यह वास्तविक आकार का हो और यह देखने के लिए इसका परीक्षण किया कि कौन सा समूह इसे सबसे तेजी से नेविगेट करता है!