ความท้าทายแรลลี่โรโบ
ในการท้าทายนี้ คุณจะต้องขับเคลื่อนหุ่นยนต์ของคุณผ่านสนามแข่งรวมกับเส้นทางของบุคคลหรือทีมอื่น! เพื่อให้บรรลุผลสำเร็จในการท้าทาย ทีมจะต้องสร้างแผนที่ขนาดที่ถูกต้องของหลักสูตรรวมใหม่โดยใช้ขนาดและมาตราส่วนจากทั้งนักเรียนหรือทีม แต่ละทีมจากหลักสูตรรวมจะมีไดร์เวอร์ที่จะนำทางหุ่นยนต์ตลอดหลักสูตร ทีมที่มีนักแข่งที่เข้าเส้นชัยได้เร็วที่สุดเป็นผู้ชนะ!
กฎการท้าทาย:
-
หุ่นยนต์จะต้องเริ่มต้นและสิ้นสุดที่เส้นชัย
-
ทั้งสองทีมจะใช้โปรแกรม Drive บน Robot Brain
-
ในขณะที่สมาชิกในทีมคนหนึ่งขับเคลื่อนหุ่นยนต์ คนอื่นๆ ควรตรวจสอบให้แน่ใจว่าหุ่นยนต์ไม่ได้ชนด้านข้างของสนามหรือสูญเสียการควบคุม
-
คุณสามารถขับหุ่นยนต์ผ่านสนามแข่งได้หนึ่งครั้งเป็นรอบฝึกซ้อมก่อนที่จะบันทึกเวลา
-
ขนาดของทั้งสองหลักสูตรจะต้องอยู่ในหน่วยและขนาดเดียวกัน
-
แต่ละทีมจะต้องจัดทำแผนที่ขนาดใหม่อย่างถูกต้อง โดยมีการวัดตามมูลค่าของสนามแข่งที่รวมกัน
-
ไม่ว่าทีมใดจะจบหลักสูตรเดียวกันโดยใช้เวลาน้อยกว่า - ชนะ!
-
มีความสุข!
![]() เคล็ดลับของครู
เคล็ดลับของครู
ตรวจสอบให้แน่ใจว่าแต่ละทีมมีตัวควบคุม V5 ที่จับคู่อย่างถูกต้อง ก่อนที่จะรันโปรแกรมไดรฟ์
![]() กล่องเครื่องมือครู
กล่องเครื่องมือครู
วิธีแก้ไขที่เป็นไปได้อาจมีดังต่อไปนี้:
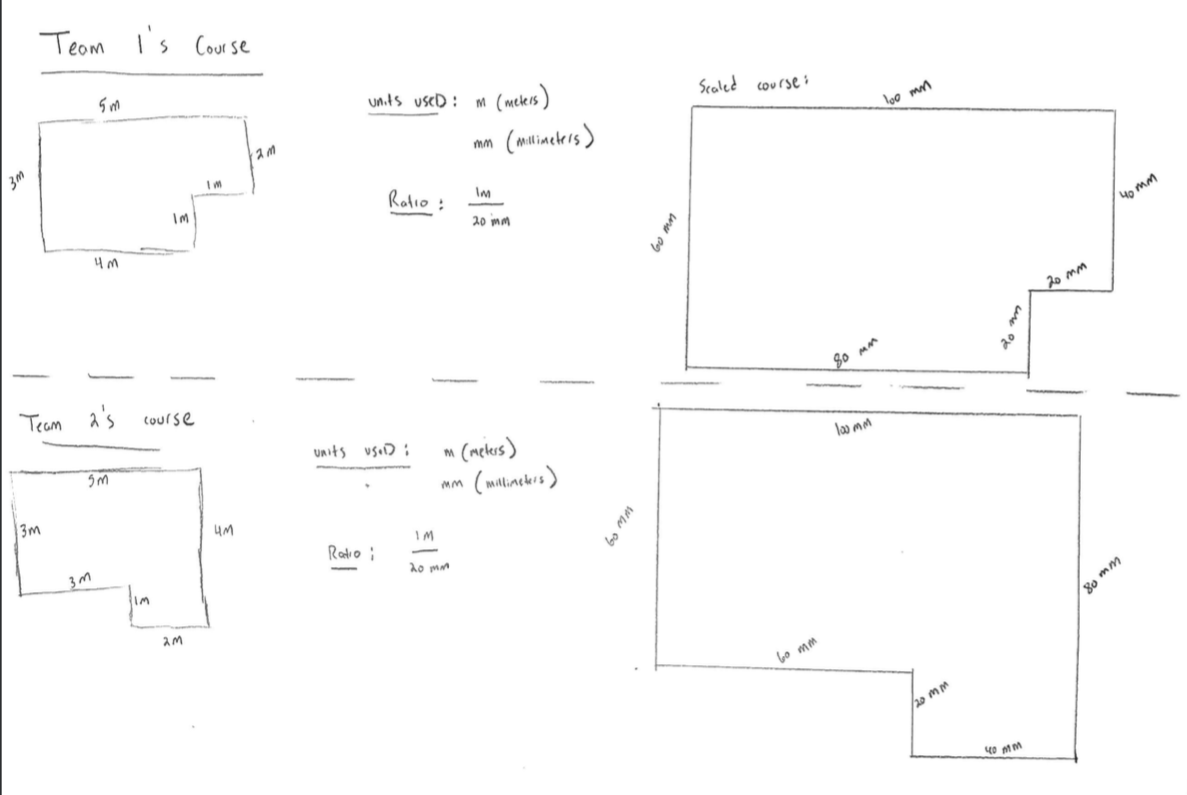
ด้านบนของหน้าแสดงขนาดที่แท้จริงของหลักสูตรของกลุ่มหรือทีม ตรงกลางหน้าจะแสดงหน่วยและอัตราส่วนที่ใช้ในการปรับขนาด นี่เป็นสิ่งสำคัญเนื่องจากแต่ละกลุ่มจะต้องแน่ใจว่าพวกเขาใช้หน่วยและขนาดเดียวกัน หากไม่เป็นเช่นนั้น พวกเขาจะใช้เวลาสักครู่เพื่อทำการเปลี่ยนแปลงที่จำเป็น เพื่อให้พวกเขาอยู่ในหน่วยเดียวกันและใช้มาตราส่วนเดียวกัน
ด้านขวาของหน้าแสดงขนาดของหลักสูตรที่ย่อขนาดลง
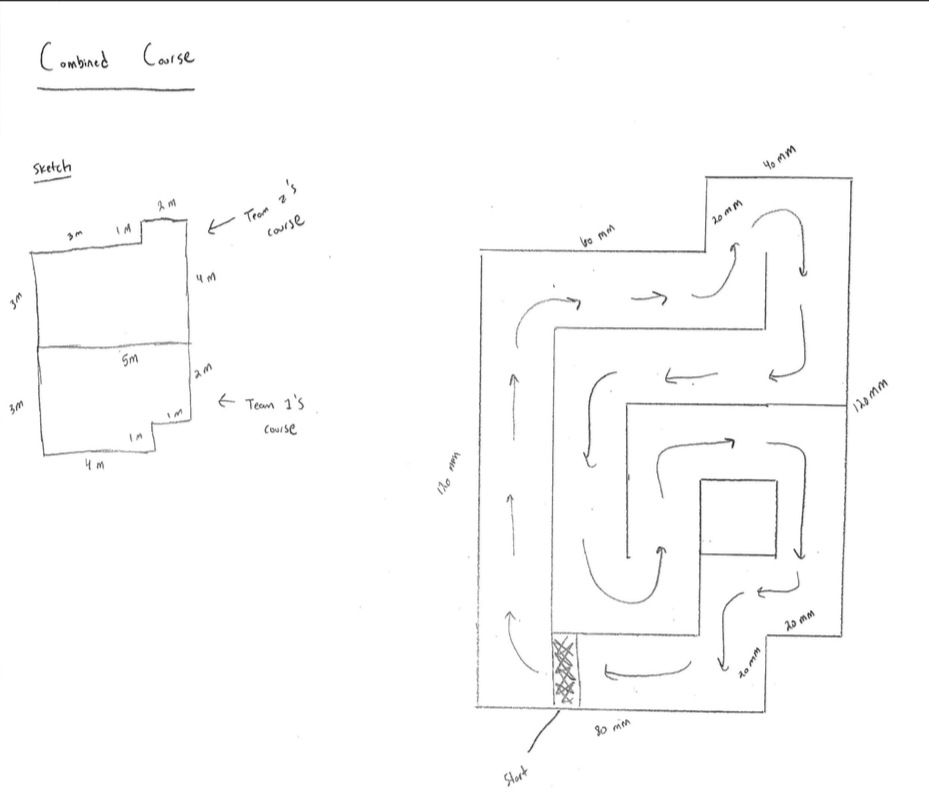
ที่ด้านล่าง หลักสูตรรวมจะแสดงวิธีที่ทั้งสองกลุ่มตัดสินใจรวมหลักสูตรเข้าด้วยกัน พวกเขาตัดสินใจว่าเนื่องจากทั้งสองมีสนามด้านหนึ่งที่ยาว 5 เมตรหรือลดขนาดลงเหลือ 100 มม. พวกเขาจึงจัดวางสนามของกลุ่มหรือทีมที่ 1 แล้วเชื่อมต่อสนามของทีมหรือกลุ่มที่ 2 โดยพลิกกลับในแนวนอน เพื่อให้ รวมด้าน 100 มม.
จากนั้นกลุ่มต่างๆ ใช้ขนาดของสปีดบอทที่ลดขนาดลงเพื่อออกแบบวิธีที่หุ่นยนต์ควรนำทางในเส้นทางโดยใช้ลูกศรและการวัดที่แม่นยำ
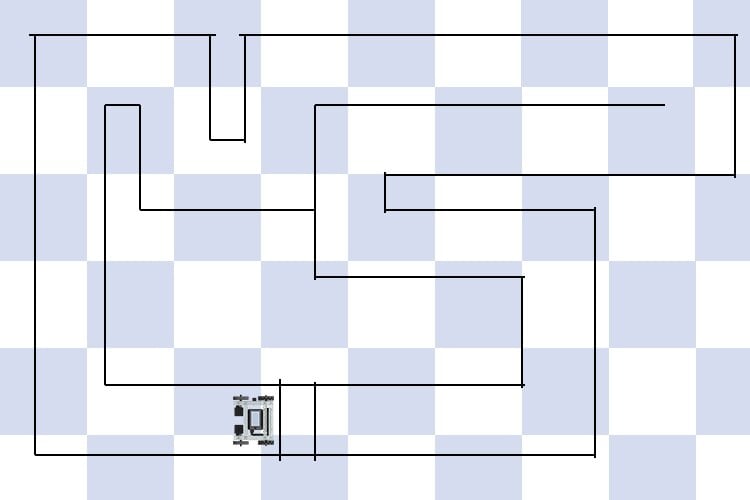
จากนั้นนักเรียนจึงขยายขนาดภาพวาดให้มีขนาดเท่าของจริงและทดสอบเพื่อดูว่ากลุ่มใดสำรวจได้เร็วที่สุด!