
उड़ान यातायात नियंत्रक चुनौती समाधान - पायथन
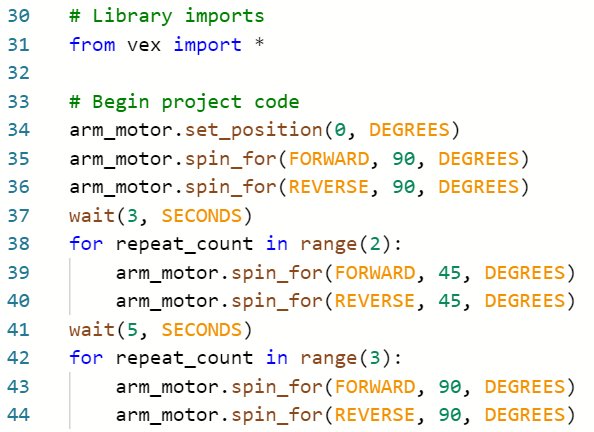
चूंकि लूप्स अभी तक शुरू नहीं किए गए हैं, इसलिए निम्नलिखित एक पूर्णतः स्वीकार्य समाधान है:
अधिक उन्नत छात्र समाधान को सरल बनाने के लिए लूप का उपयोग कर सकते हैं।
एसटीईएम लैब्स
शीघ्र वितरण
विद्यार्थी
चूंकि लूप्स अभी तक शुरू नहीं किए गए हैं, इसलिए निम्नलिखित एक पूर्णतः स्वीकार्य समाधान है:
अधिक उन्नत छात्र समाधान को सरल बनाने के लिए लूप का उपयोग कर सकते हैं।