
Pemrograman Lengan Robot - C++
 Kotak Alat Guru
-
Garis Besar Aktivitas
Kotak Alat Guru
-
Garis Besar Aktivitas
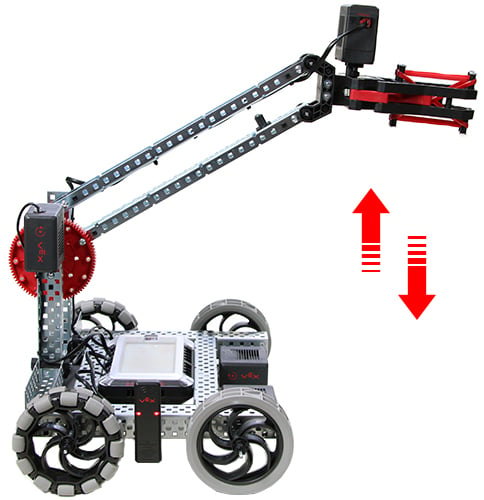
V5 Clawbot siap menjangkau!
Eksplorasi ini akan memberi Anda alat untuk dapat mulai membuat beberapa proyek keren yang menggunakan lengan V5 Clawbot.
- Instruksi VEXcode V5 yang akan digunakan dalam eksplorasi ini:
- ArmMotor.spinFor(maju, 90,derajat);
- ArmMotor.setPosition(0, derajat);
- tunggu(2, detik);
-
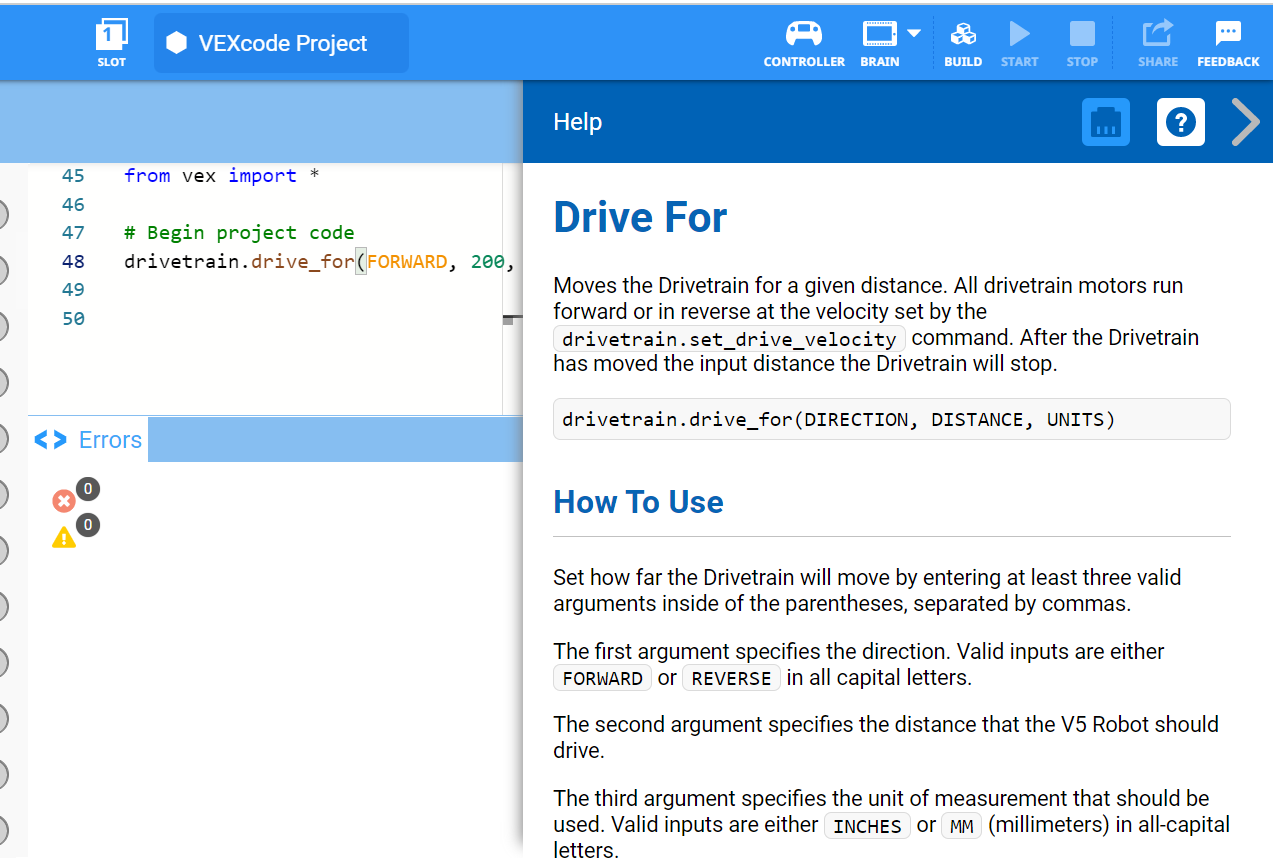
Untuk mengetahui informasi lebih lanjut tentang instruksi, pilih Bantuan lalu pilih ikon tanda tanya di samping perintah untuk melihat informasi lebih lanjut.
- Pastikan Anda telah mengunduh dan menyiapkan perangkat keras yang diperlukan, buku catatan teknik, dan VEXcode V5.
| Kuantitas | Bahan-bahan yang Dibutuhkan |
|---|---|
| 1 |
Kit Pemula Kelas VEX V5 (dengan firmware terbaru) |
| 1 |
Kode VEX V5 |
| 1 |
Buku Catatan Teknik |
| 1 |
Contoh proyek Clawbot dan Advanced TrainingBot (Drivetrain 2-motor, Tanpa Gyro) |
Langkah 1: Persiapan Eksplorasi
Sebelum Anda memulai kegiatan, apakah Anda sudah menyiapkan masing-masing barang ini? Periksa masing-masing hal berikut ini:
-
Apakah motor terpasang pada port yang benar?
-
Apakah kabel pintardimasukkan sepenuhnyake semua motor?
-
Apakah Otakdihidupkan?
-
Apakah bateraiterisi?
 Tips Guru
Tips Guru
Modelkan setiap langkah pemecahan masalah untuk siswa.
Langkah 2: Mulai Proyek Baru
Sebelum Anda memulai proyek Anda, pilih proyek templat yang benar. Proyek contoh Clawbot dan Advanced TrainingBot (Drivetrain 2-motor, Tanpa Gyro) berisi konfigurasi motor Clawbot. Jika templat tidak digunakan, robot Anda tidak akan menjalankan proyek dengan benar.
Selesaikan langkah-langkah berikut:
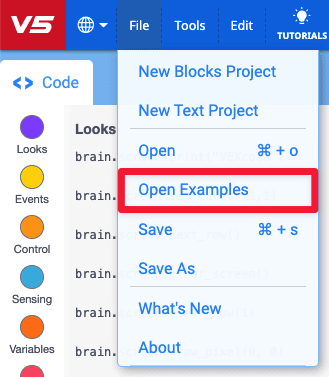
- Buka menu File.
- PilihBukaContoh.

- Pilih dan buka proyek contoh Clawbot dan Advanced TrainingBot (Drivetrain 2-motor, Tanpa Gyro).
- Karena kita akan memprogram untuk mengendalikan lengan, ganti nama proyek AndaArmControl.
- Simpanproyek Anda.
- Periksa untuk memastikan nama proyek ArmControl sekarang ada di jendela di tengah bilah alat.

Tips Guru
-
Karena ini merupakan kegiatan awal dalam pemrograman, guru harus memodelkan langkah-langkahnya, lalu meminta siswa menyelesaikan tindakan yang sama. Guru kemudian harus memantau siswa untuk memastikan bahwa mereka mengikuti langkah-langkah dengan benar.
-
Pastikan siswa telah memilih Buka Contoh dari menu File.
-
Pastikan siswa telah memilih proyek contoh Clawbot Template (Drivetrain 2-motor, Tanpa Gyro).
Anda dapat menunjukkan kepada siswa bahwa ada beberapa pilihan untuk dipilih pada halamanContoh. Saat mereka membangun dan menggunakan robot lain, mereka akan memiliki kesempatan untuk menggunakan templat yang berbeda.
-
Anda dapat meminta siswa untuk menambahkan inisial mereka atau nama kelompok mereka ke nama proyek. Ini akan membantu membedakan proyek jika Anda meminta siswa untuk menyerahkannya.
Kotak Alat Guru
-
Menyimpan Proyek
-
Tunjukkan bahwa ketika mereka pertama kali membuka VEXcode V5, jendelanya diberi label MyProject1. MyProject1 adalah nama proyek default saat VEXcode V5 pertama kali dibuka. Setelah proyek diubah namanya menjadi Drive dan disimpan, tampilan diperbarui untuk menampilkan nama proyek baru. Dengan menggunakan jendela ini di bilah alat, mudah untuk memeriksa apakah siswa menggunakan proyek yang benar.
-
Beritahukan siswa bahwa mereka sekarang siap untuk memulai proyek pertama mereka. Jelaskan kepada siswa bahwa hanya dengan mengikuti beberapa langkah sederhana, mereka akan dapat membuat dan menjalankan proyek yang akan menaikkan dan menurunkan lengan Clawbot.
-
Ingatkan siswa untuk menyimpan proyek mereka saat mereka mengerjakannya. Artikeldari Basis Pengetahuan Robotik VEX ini menjelaskan praktik penyimpanan dalam VEXcode V5.
Kotak Alat Guru
-
Berhenti dan Diskusikan
Ini saat yang tepat untuk berhenti sejenak dan meminta kelompok siswa meninjau kembali langkah-langkah yang baru saja diselesaikan saat memulai proyek baru di VEXcode V5.
Langkah 3: Gerakkan Lengan ke Atas
Sekarang kita akan mulai dengan memprogram lengan untuk terangkat!
int main() {
// Menginisialisasi Konfigurasi Robot. JANGAN DIHAPUS!
vexcodeInit();
ArmMotor.setPosition(0, derajat);
}- Tulis instruksi ArmMotor.setPosition(); seperti yang ditunjukkan di atas di area pemrograman untuk mengatur posisi awal lengan.
ArmMotor.setPosition(0, derajat);
ArmMotor.spinFor(maju, 90, derajat);- Tambahkan instruksi ArmMotor.spinFor(); di bawah perintah ArmMotor.setPosition() seperti yang ditunjukkan di atas untuk menggerakkan lengan ke atas. Pastikan Spin For diberi indentasi agar sesuai dengan perintah Set Position , dan semua perintah berada dalam kurung kurawal.

- Klik ikon Slot. Anda dapat mengunduh proyek Anda ke salah satu slot yang tersedia di Robot Brain. Klik Slot 1.

- Hubungkan robot ke komputer atau tablet Anda. Ikon Otak pada bilah alatberubah menjadi hijausetelah koneksi berhasil dibuat.

- Klik tombolUnduhpada bilah alat untuk mengunduh proyek Drive ke Robot Brain.
Kotak Alat Guru
-
Bantuan dengan Teks
-
Jika siswa menggunakan komputer, minta mereka sekarang untuk melepaskan kabel USB dari Robot Brain. Menghubungkan robot ke komputer saat menjalankan proyek dapat menyebabkan robot menarik kabel koneksi.

- Periksa apakah proyek ArmControl telah diunduh ke otak di slot yang Anda pilih.
Kotak Alat Guru
-
Pilihan untuk Menjadi Model Pertama
Model menjalankan proyek di depan kelas sebelum meminta semua siswa mencobanya sekaligus. Kumpulkan para siswa di satu area dan sisakan cukup ruang bagi Clawbot untuk menggerakkan lengannya. Tunjukkan cara mengakhiri proyek dan menurunkan lengan Clawbot kembali ke posisi istirahat.
Beritahukan siswa bahwa sekarang giliran mereka untuk menjalankan proyek mereka. Pastikan mereka memiliki ruang yang cukup untuk mengangkat lengan Clawbot dengan aman.
- Jalankanproyek pada Clawbot dengan memastikan proyek dipilih lalu tekan tombol Jalankan. Selamat atas terciptanya proyek Claw Arm pertama Anda!
Langkah 4: Coba Ini: Program Lengan ke Bawah
Sekarang setelah Anda memprogram lengan untuk bergerak ke atas, Anda sekarang akan memprogram lengan untuk menurunkan atau bergerak ke bawah.

![]()
- Tambahkan instruksi ArmMotor.spinFor(); kedua ke proyek ArmControl Anda sehingga lengan terangkat hingga 90 derajat, menunggu 2 detik, lalu turun kembali.
- Petunjuk:Anda perlu mengubah arah dalam instruksi.
- Perhatikan bahwa lengan menahan posisinya saat perintahwaitdijalankan. Motor menarik daya dari baterai untuk menahan lengan melawan gaya gravitasi. Itu karena pengaturan default untuk menghentikan motor adalah pengaturantahan. Ada dua pengaturan lain untuk berhenti -remdanluncur. Anda akan mempelajarinya di lab lain.
Kotak Alat Guru
-
Solusi
Solusi untuk tantangan tersebut ada di bawah. Untuk menurunkan lengan, siswa perlu mengubah parameter “maju” menjadi “mundur” dalam instruksi ArmMotor.spinFor(); yang ditambahkan.
// Mulai kode proyek
int main() {
// Inisialisasi Konfigurasi Robot. JANGAN DIHAPUS!
vexcodeInit();
ArmMotor.setPosition(0, derajat);
ArmMotor.spinFor(maju, 90, derajat);
tunggu(2,detik);
ArmMotor.spinFor(mundur, 90, derajat);
}Langkah 5: Selesaikan Tantangan Pengendali Lalu Lintas Penerbangan
![]() Dalam Tantangan Pengendali Lalu Lintas Penerbangan, Clawbot harus menggerakkan lengannya ke atas dan ke bawah satu kali sejauh 90 derajat, menunggu selama 3 detik, menggerakkan lengannya ke atas dan ke bawah dua kali sejauh 45 derajat, menunggu selama 5 detik, lalu menggerakkan lengannya ke atas dan ke bawah tiga kali sejauh 90 derajat.
Dalam Tantangan Pengendali Lalu Lintas Penerbangan, Clawbot harus menggerakkan lengannya ke atas dan ke bawah satu kali sejauh 90 derajat, menunggu selama 3 detik, menggerakkan lengannya ke atas dan ke bawah dua kali sejauh 45 derajat, menunggu selama 5 detik, lalu menggerakkan lengannya ke atas dan ke bawah tiga kali sejauh 90 derajat.
Berikut adalah daftar perilaku Clawbot:
- Gerakkan lengan ke atas lalu ke bawah sejauh 90 derajat.
- Tunggu 3 detik.
- Gerakkan lengan ke atas lalu ke bawah sejauh 45 derajat.
- Gerakkan lengan ke atas lalu ke bawah sejauh 45 derajat.
- Tunggu 5 detik.
- Gerakkan lengan ke atas lalu ke bawah sejauh 90 derajat.
- Gerakkan lengan ke atas lalu ke bawah sejauh 90 derajat.
- Gerakkan lengan ke atas lalu ke bawah sejauh 90 derajat.
Kotak Alat Guru
-
Solusi
Sebagian besar instruksi dalam tantangan ini adalah ArmMotor.spinFor(); Setelah menambahkan instruksi untuk menggerakkan lengan ke atas, dan satu untuk menggerakkan lengan ke bawah, Anda dapat menyorot kedua instruksi tersebut, klik kanan, lalu pilih untuk menyalin dan menempelkannya sebanyak yang diperlukan. Kemudian parameter dapat diubah untuk memenuhi tantangan dan instruksi wait(); dapat ditambahkan di antaranya.

- Solusi Tantangan Pengendali Lalu Lintas Penerbangan:
// Mulai kode proyek
int main() {
// Inisialisasi Konfigurasi Robot. JANGAN DIHAPUS!
vexcodeInit();
ArmMotor.setPosition(0, derajat);
ArmMotor.spinFor(maju, 90, derajat);
ArmMotor.spinFor(mundur, 90, derajat);
tunggu(3, detik)
ArmMotor.spinFor(maju, 45, derajat);
ArmMotor.spinFor(mundur, 45, derajat);
ArmMotor.spinFor(maju, 45, derajat);
ArmMotor.spinFor(mundur, 45, derajat);
tunggu(5, detik)
ArmMotor.spinFor(maju, 90, derajat);
ArmMotor.spinFor(mundur, 90, derajat);
ArmMotor.spinFor(maju, 90, derajat);
ArmMotor.spinFor(mundur, 90, derajat);
ArmMotor.spinFor(maju, 90, derajat);
ArmMotor.spinFor(mundur, 90, derajat);
}- Rubrik Pemrograman (Google Doc / .docx / .pdf)