
Pratica
Nell'ultima sezione hai imparato a conoscere i manipolatori attivi e passivi e come possono essere progettati per manipolare oggetti. Ora applicherai ciò che hai imparato per iterare sull'attuale progettazione del Clawbot in modo da spostare modo efficiente i Buckyball nell'attività pratica sui Manipolatori!
In questa attività, ti eserciterai a spostare i Buckyball dal centro del campo fino alla porta posta alla fine del campo. Itererai sul design attuale del manipolatore di artigli o ne creerai uno nuovo per massimizzare la tua capacità di muovere i Buckyball attraverso l'obiettivo.
Guarda il video qui sotto per scoprire come applicare ciò che hai imparato per completare l'attività pratica sui Manipolatori.
Adesso tocca a te completare l'attività pratica sui Manipolatori!
In questa animazione, un controller viene utilizzato per guidare il robot per spostare i Buckyball dal centro del campo attraverso la porta all'estremità opposta del campo. Questa animazione mostra solo un possibile modo per spostare i Buckyball. Itererai e migliorerai la tua build del manipolatore mentre completi l'attività di pratica dei manipolatori.
Utilizzare questo documento come riferimento per completare l'attività pratica. Google / .docx / .pdf
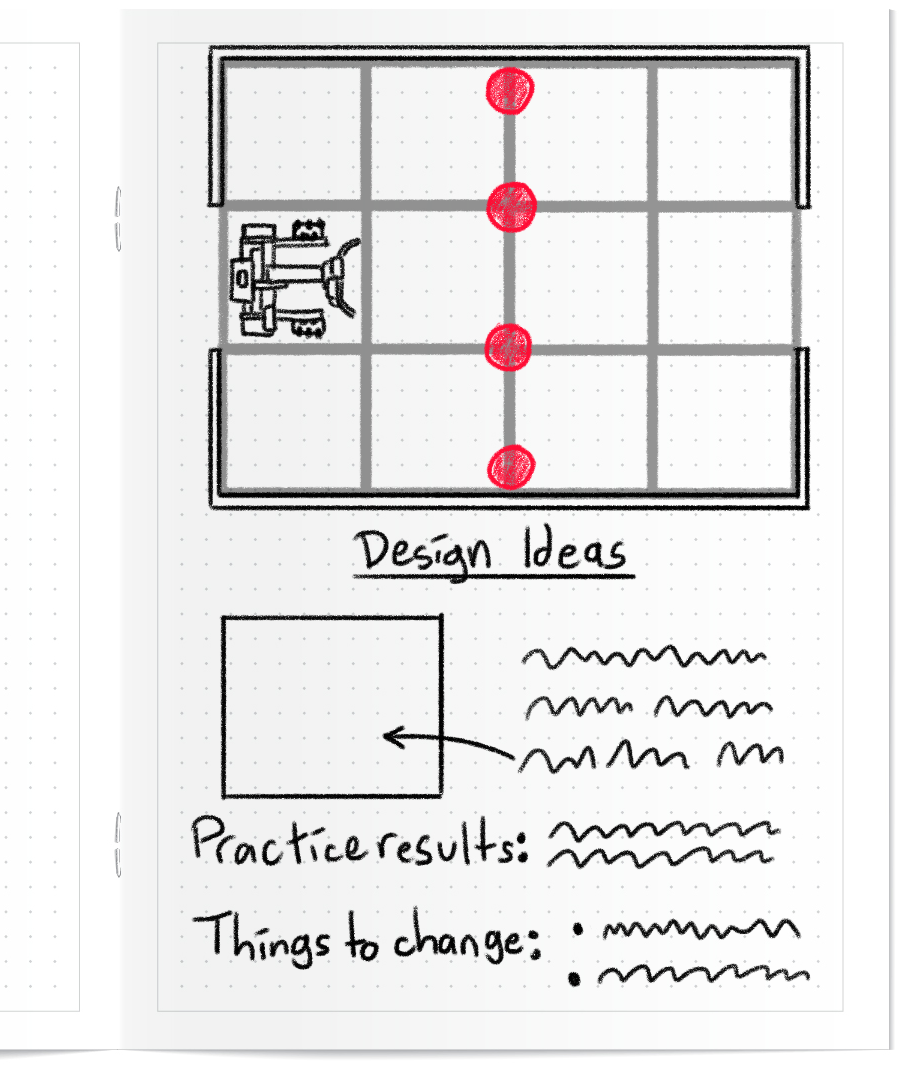
Una volta completata l'attività pratica, documenta i tuoi progetti e test nel tuo quaderno di progettazione:
- Osservazioni su quanto bene il robot inizialmente sposta i Buckyball verso l'obiettivo.
- Il progetto originale del tuo manipolatore.
- Come hai elaborato questo progetto per migliorare le prestazioni del tuo robot nell'attività pratica?
Nell'immagine a sinistra puoi vedere un esempio di come registrare le tue idee progettuali e i tuoi test.
Preparati per la sfida
In Compete (nella pagina successiva), metterai alla prova il progetto del tuo manipolatore quando gareggerai in uno-contro-uno Robot Soccer. Impara come competere nella sfida, verifica la tua comprensione, quindi allenati per la sfida.
L'obiettivo di questa sfida è il controller per guidare il tuo robot e il maggior numero di gol in 60 secondi.
Guarda questa animazione per scoprire come competere nella sfida di calcio tra robot uno contro uno.
Segui i passaggi in questo documento per saperne di più su come completare questa sfida. Google / .docx / .pdf
Controlla la tua comprensione
Prima di iniziare la sfida, assicurati di aver compreso le regole e di aver impostato la sfida rispondendo alle domande nel documento sottostante sul tuo quaderno di progettazione.
Verifica la tua comprensione domande Google / .docx / .pdf
Dopo aver completato le domande, esercitatevi per la sfida.
Seleziona Avanti > per partecipare alla sfida di calcio tra robot uno contro uno.