
Práctica
En la última sección, aprendiste sobre los manipuladores activos y pasivos y cómo pueden diseñarse para manipular objetos. ¡Ahora vas a aplicar lo que has aprendido para iterar en el diseño actual de Clawbot con el fin de mover Buckyballs de manera eficiente en la actividad de práctica de Manipuladores!
En esta actividad, practicarás mover bolas de bucky desde el centro del campo a través de la portería al final del campo. Iterarás en el diseño actual del manipulador de garras, o crearás uno nuevo para maximizar tu capacidad de mover las Buckyballs a través de la meta.
Mire el video a continuación para ver cómo puede aplicar lo que ha aprendido para completar la actividad de práctica de Manipuladores.
¡Ahora es tu turno de completar la actividad de práctica de Manipuladores!
En esta animación, se utiliza un controlador para impulsar al robot a mover las Buckyballs desde el centro del campo a través de la portería en el extremo opuesto del campo. Esta animación muestra solo una forma posible de mover las Buckyballs. Iterarás y mejorarás la construcción de tu manipulador a medida que completes la actividad de práctica de Manipuladores.
Utilice este documento como referencia para completar la actividad de práctica. Google / .docx / .pdf
A medida que complete la actividad de práctica, documente sus diseños y pruebas en su cuaderno de ingeniería:
- Observaciones sobre qué tan bien el robot mueve inicialmente las Buckyballs a la meta.
- El diseño original de tu manipulador.
- ¿Cómo iteró en este diseño para mejorar el rendimiento de su robot en la actividad de práctica?
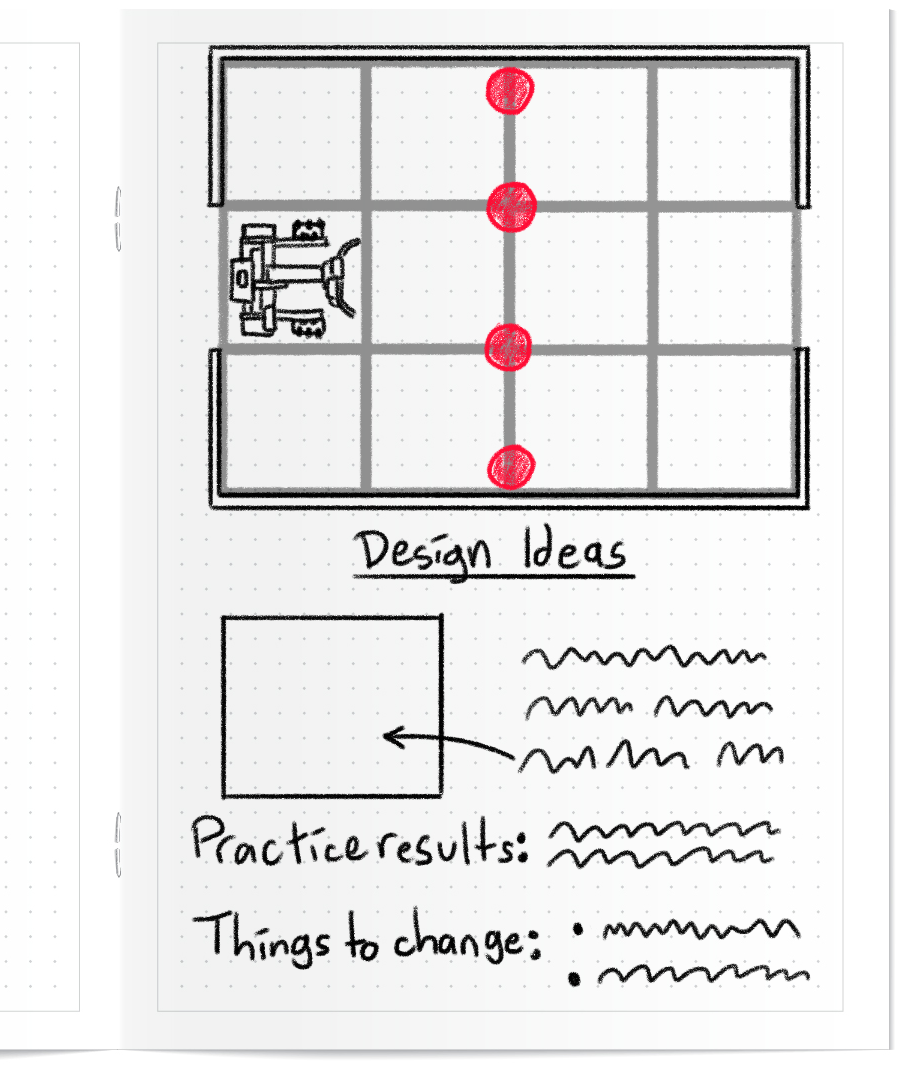
Vea la imagen de la izquierda para ver un ejemplo de cómo puede registrar sus ideas y pruebas de diseño.
Prepárate para el reto
En Compete (en la página siguiente), pondrás a prueba el diseño de tu manipulador cuando compitas en One-on-One Robot Soccer. Aprende a competir en el desafío, comprueba tu comprensión y luego practica para el desafío.
El objetivo de este desafío es utilizar el controlador para que tu robot marque la mayor cantidad de goles en 60 segundos.
Mira esta animación para ver cómo competir en el One-on-One Robot Soccer Challenge.
Sigue los pasos de este documento para obtener más información sobre cómo completar este desafío. Google / .docx / .pdf
Compruebe su comprensión
Antes de comenzar el desafío, asegúrese de comprender las reglas y configúrelas respondiendo las preguntas del siguiente documento en su cuaderno de ingeniería.
Verifique sus preguntas de comprensión Google / .docx / .pdf
Después de completar las preguntas, practique para el desafío.
Selecciona Siguiente > para competir en el One-on-One Robot Soccer Challenge.