
ฝึกฝน
ในส่วนที่แล้วคุณได้เรียนรู้เกี่ยวกับตัวจัดการแบบแอคทีฟและพาสซีฟและวิธีที่พวกเขาสามารถออกแบบมาเพื่อจัดการกับวัตถุ ตอนนี้คุณจะนำสิ่งที่คุณได้เรียนรู้ไปประยุกต์ใช้กับการออกแบบ Clawbot ในปัจจุบันเพื่อที่จะ เคลื่อนย้าย Buckyballs ได้อย่างมีประสิทธิภาพในกิจกรรมการฝึกฝนนักจัดการ!
ในกิจกรรมนี้คุณจะได้ฝึกฝนการเคลื่อนบัคกี้บอลจากใจกลางสนามผ่านเป้าหมายที่ท้ายสนาม คุณจะทำซ้ำในการออกแบบหุ่นยนต์กรงเล็บปัจจุบันหรือสร้างใหม่เพื่อเพิ่มความสามารถของคุณในการย้าย Buckyballs ผ่านเป้าหมาย
ดูวิดีโอด้านล่างเพื่อดูว่าท่านจะนำสิ่งที่ได้เรียนรู้ไปประยุกต์ใช้ในการทำกิจกรรมการฝึกบริหารจัดการให้เสร็จสมบูรณ์ได้อย่างไร
ตอนนี้ถึงตาคุณแล้วที่จะทำกิจกรรมฝึกฝนการจัดการให้เสร็จ!
ในแอนิเมชันนี้ตัวควบคุมจะใช้เพื่อขับเคลื่อนหุ่นยนต์เพื่อเคลื่อนบัคกี้บอลจากใจกลางสนามผ่านเป้าหมายที่ปลายด้านตรงข้ามของสนามภาพเคลื่อนไหว นี้แสดงให้เห็นถึงวิธีหนึ่งที่เป็นไปได้ในการเคลื่อนย้ายบัคกี้บอล คุณจะทำซ้ำและปรับปรุงตามการสร้างตัวจัดการของคุณใน ขณะที่คุณทำกิจกรรมการฝึกฝนตัวจัดการเสร็จสิ้น
ใช้เอกสารนี้เป็นเอกสารอ้างอิงเพื่อทำกิจกรรมการฝึกฝนให้เสร็จ สมบูรณ์ Google /.docx /.pdf
เมื่อคุณทำกิจกรรมฝึกซ้อมเสร็จแล้วให้บันทึกการออกแบบและการทดสอบของคุณลงในสมุดบันทึกวิศวกรรมของคุณ:
- การสังเกตว่าหุ่นยนต์เคลื่อนที่บัคกี้บอลไปยังเป้าหมายได้ดีเพียงใด
- การออกแบบดั้งเดิมของหุ่นยนต์ของคุณ
- คุณทำซ้ำในการออกแบบนี้เพื่อปรับปรุงประสิทธิภาพของหุ่นยนต์ของคุณในกิจกรรมการฝึกฝนอย่างไร?
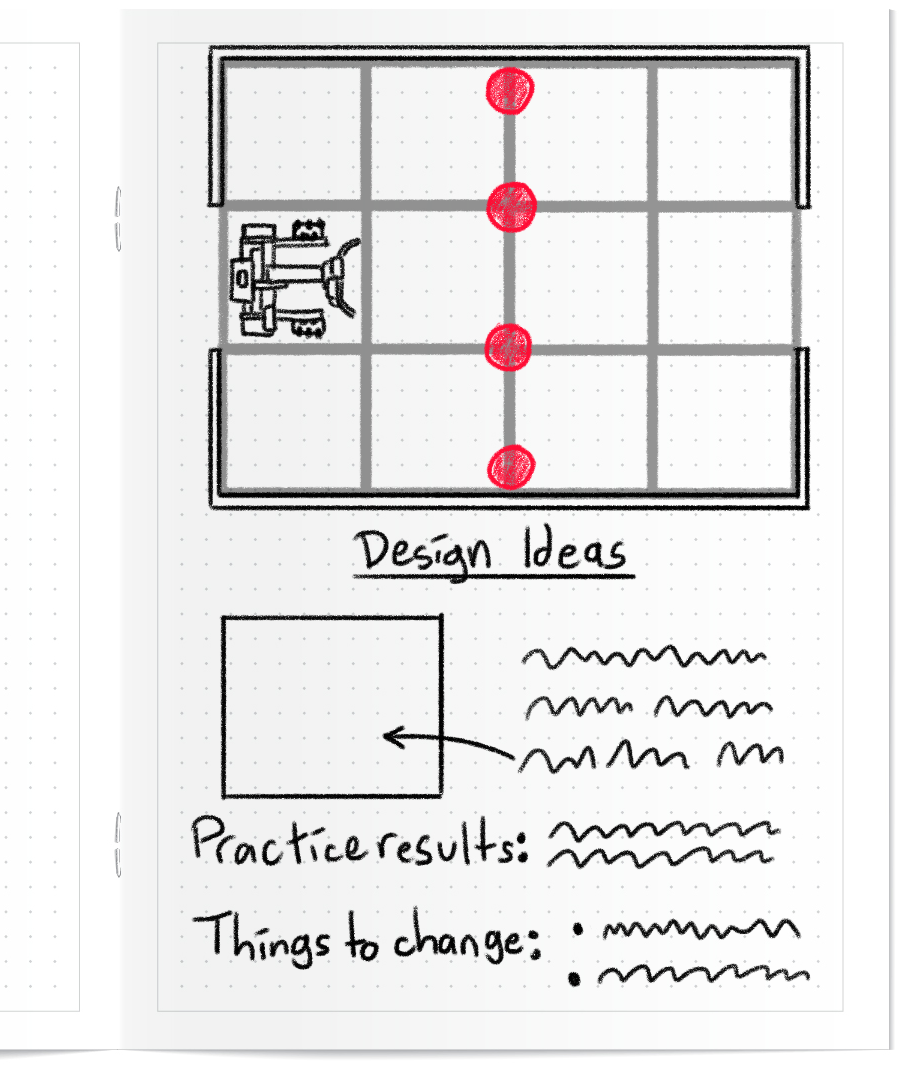
ดูภาพด้านซ้ายเพื่อดูตัวอย่างว่าท่านจะบันทึกแนวคิดและการทดสอบการออกแบบของท่านได้อย่างไร
เตรียมพร้อมสำหรับการท้าทาย
ในการแข่งขัน (ในหน้าถัดไป) คุณจะนำการออกแบบหุ่นยนต์ของคุณไปทดสอบเมื่อคุณแข่งขันใน One-on-One Robot Soccer เรียนรู้วิธีการแข่งขันในความท้าทายตรวจสอบความเข้าใจของคุณจากนั้นฝึกฝนเพื่อความท้าทาย
เลือกถัดไป > เพื่อเข้าร่วมการแข่งขัน Robot Soccer Challenge แบบตัวต่อตัว