
지금까지 이 단원에서는 VEX AIM 코딩 로봇을 코딩하여 프로젝트에서 결정을 내리고 동작을 반복하는 방법을 알아보았습니다. 을 운전하는 동안에 동일한 결정을 내릴 수 있다면 어떨까요? 이번 수업에서는 VEXcode AIM 프로젝트에서 배운 내용을 적용하여 One Stick Controller를 사용자 지정하는 방법에 대해 알아봅니다. 이는 Capstone 챌린지 대회의 운전 부문에 참여하기 위해 준비하는 데 도움이 될 것입니다.
아래 영상을 시청하여 다음에 대해 알아보세요:
- 프로젝트에서 컨트롤러 블록을 사용한 이동이 작동하는 방식입니다.
- 컨트롤러의 버튼을 사용자 지정하는 방법.
- If 블록과 If else 블록의 차이점.
지도 연습
귀하의 정보를 위해
여러 개의 프로젝트를 다른 슬롯에 다운로드하여 로봇에 저장할 수 있습니다. 기본적으로 VEXcode AIM 프로젝트는 슬롯 1에 다운로드됩니다. 프로젝트 이름 대화 상자 옆에 있는 도구 모음에서 슬롯 아이콘을 선택하여 슬롯을 변경합니다.

드롭다운 메뉴에서 원하는 슬롯을 선택하세요.
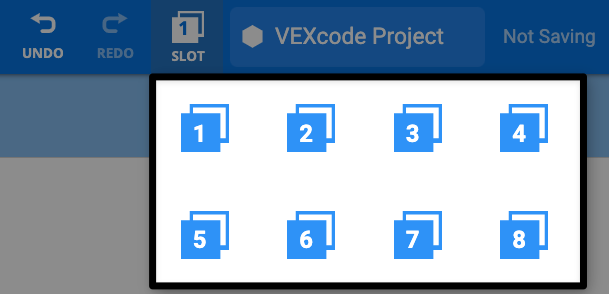
이제 프로젝트를 다운로드하면 선택한 슬롯에 다운로드됩니다.
마무리
모든 단위로 돌아가려면 > 단위로 돌아가기를 선택하세요.