
ในหน่วยนี้ คุณได้เรียนรู้เกี่ยวกับการเขียนโค้ดหุ่นยนต์ VEX AIM เพื่อตัดสินใจและทำซ้ำพฤติกรรมในโครงการแล้ว จะเป็นอย่างไรหากคุณสามารถเขียนโค้ดการตัดสินใจแบบเดียวกันนี้ ในขณะที่กำลังขับหุ่นยนต์ ? ในบทเรียนนี้ คุณจะได้เรียนรู้วิธีนำสิ่งที่เรียนรู้ไปใช้ในโครงการ VEXcode AIM เพื่อให้คุณสามารถปรับแต่ง One Stick Controller ของคุณได้ สิ่งนี้จะช่วยคุณเมื่อคุณเตรียมพร้อมที่จะเข้าร่วมการแข่งขันขับรถ Capstone Challenge
ชมวิดีโอด้านล่างเพื่อเรียนรู้เกี่ยวกับ:
- วิธีการทำงานของบล็อก Move พร้อมคอนโทรลเลอร์ ในโครงการ
- วิธีการปรับแต่งปุ่มบนคอนโทรลเลอร์
- ความแตกต่างระหว่างบล็อก If และบล็อก If else
ตอนนี้คุณได้ชมวิดีโอแล้ว ให้บันทึกความคิดของคุณลงในสมุดบันทึก ตอบคำถามเหล่านี้เพื่อเป็นแนวทางในการคิดของคุณและช่วยคุณเตรียมความพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- ลองนึกถึงงานขับรถที่คุณเคยทำสำเร็จมาก่อน การปรับแต่งคอนโทรลเลอร์ของคุณจะเป็นประโยชน์หรือไม่? ทำไมหรือทำไมไม่?
- คุณมองเห็นการใช้การควบคุมแบบกำหนดเองในความท้าทาย Capstone อย่างไร
- คุณมีหลักฐานอะไรจากวิดีโอที่สนับสนุนความคิดของคุณบ้าง?
- คุณมีคำถามอะไรเกี่ยวกับการเข้ารหัสตัวควบคุมบ้าง?
ตอนนี้คุณได้ชมวิดีโอแล้ว ให้บันทึกความคิดของคุณลงในสมุดบันทึก ตอบคำถามเหล่านี้เพื่อเป็นแนวทางในการคิดของคุณและช่วยคุณเตรียมความพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- ลองนึกถึงงานขับรถที่คุณเคยทำสำเร็จมาก่อน การปรับแต่งคอนโทรลเลอร์ของคุณจะเป็นประโยชน์หรือไม่? ทำไมหรือทำไมไม่?
- คุณมองเห็นการใช้การควบคุมแบบกำหนดเองในความท้าทาย Capstone อย่างไร
- คุณมีหลักฐานอะไรจากวิดีโอที่สนับสนุนความคิดของคุณบ้าง?
- คุณมีคำถามอะไรเกี่ยวกับการเข้ารหัสตัวควบคุมบ้าง?
หลังจากที่นักเรียนดูวิดีโอแล้วและก่อนที่จะฝึกซ้อม มารวมกันเพื่ออภิปรายทั้งชั้นเรียน ใช้คำตอบของนักเรียนต่อคำถามที่กำหนดไว้เป็นพื้นฐานในการอภิปราย
ในขณะที่นักเรียนแบ่งปันแนวคิดเกี่ยวกับการเขียนโค้ดตัวควบคุม ให้สนับสนุนให้พวกเขาเปิดใจยอมรับแนวคิดที่แตกต่าง เนื่องจากไม่มีวิธีการใดวิธีหนึ่งที่จะเขียนโค้ดตัวควบคุมของคุณได้ "อย่างถูกต้อง" ความงดงามของการปรับแต่งการควบคุมก็คือ คุณสามารถปรับแต่งโค้ดของคุณเพื่อให้ทำงานได้ดีที่สุดสำหรับคุณ สิ่งที่ดีที่สุดสำหรับนักเรียนคนหนึ่งอาจขัดแย้งกับสัญชาตญาณของนักเรียนอีกคนหนึ่ง และแนวคิดและกิจกรรมนี้เป็นสถานที่ที่ยอดเยี่ยมในการเน้นย้ำและเฉลิมฉลองความแตกต่างในการคิดเหล่านั้น สิ่งนี้ใช้ได้ไม่เพียงแต่กับปุ่มที่นักเรียนเลือกใช้ในการเขียนโค้ดเท่านั้น แต่ยังรวมถึงบล็อคหรือกลยุทธ์การเขียนโค้ดที่พวกเขาเลือกด้วย กระตุ้นให้ผู้เรียนอภิปรายแนวคิดการเขียนโค้ดในวิดีโอนี้โดยถามคำถาม เช่น:
- อธิบายความแตกต่างระหว่างการเข้ารหัสการตัดสินใจด้วยบล็อก If และการเข้ารหัสการตัดสินใจด้วยบล็อก If else
- อันหนึ่งมีข้อได้เปรียบเหนืออีกอันหรือไม่? ทำไมหรือทำไมไม่?
- คุณนึกถึงการตัดสินใจแบบมีเงื่อนไขที่คุณทำในชีวิตประจำวันที่เหมือนกับการบล็อก If else ได้ไหม มันคืออะไรและทำไมมันถึงคล้ายกัน?
View the VEXcode API Reference to learn more about the controller blocks, the Move with controller block, and the Logic - Controls section of blocks.
การฝึกปฏิบัติแบบมีคำแนะนำ
ตอนนี้คุณได้ดูและอภิปรายวิดีโอแล้ว ก็ถึงคราวของคุณที่จะฝึกฝนแล้ว!
ขั้นตอนที่ 1: ตั้งค่าฟิลด์ของคุณตามที่แสดงในภาพด้านล่าง โดยวาง AprilTag ID แบบสุ่มในแต่ละมุม 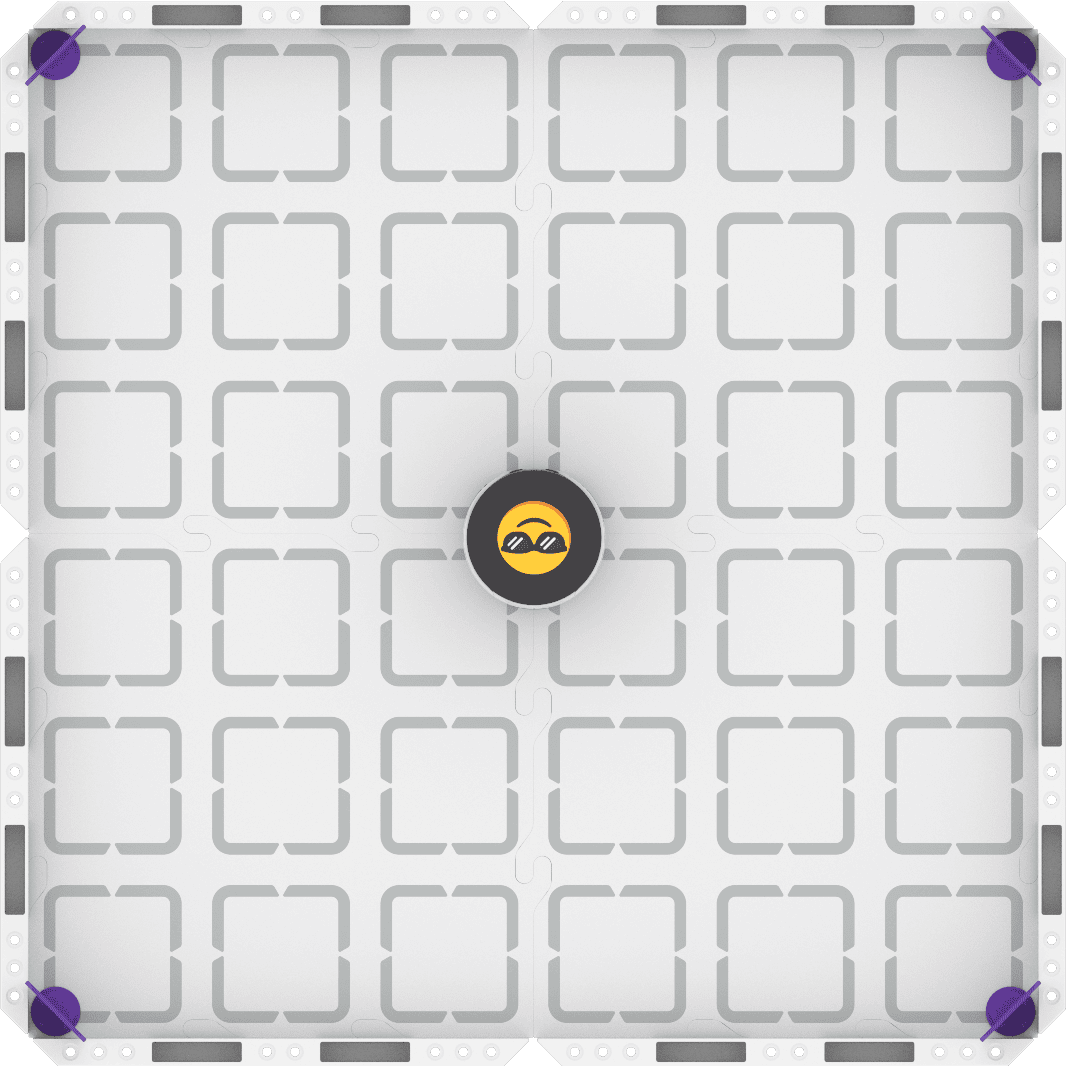
ขั้นตอน 2: ใช้โหมดขับเคลื่อนเพื่อสร้างแบบจำลองการเคลื่อนไหวและวางแผนปฏิกิริยาที่หุ่นยนต์ของคุณจะมีต่อรหัส AprilTag ทั้งสี่รหัส
- งานของคุณคือการขับเคลื่อนหุ่นยนต์เพื่อตรวจจับและตอบสนองต่อ AprilTag ID แต่ละอัน โดยแสดงปฏิกิริยาที่แตกต่างกันสำหรับ AprilTag ID แต่ละอัน บันทึกการขับขี่ของคุณและวางแผนว่าคุณจะกระตุ้นปฏิกิริยาต่างๆ ของคุณอย่างไรด้วยปุ่มควบคุมแบบกำหนดเอง
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการฝึกฝนของคุณ
- เคล็ดลับ: ขณะขับรถ ให้สังเกตว่าปุ่มใดจะช่วยให้สมาชิกแต่ละคนในกลุ่มทำภารกิจต่างๆ ได้ง่ายขึ้น ตัดสินใจว่าคุณจะใช้ปุ่มที่กำหนดเองแบบเดียวกันหรือไม่หรือคุณต้องการมีการควบคุมแยกกัน
ขั้นตอน 3: เขียนโค้ดให้หุ่นยนต์ของคุณทำงานให้สำเร็จ
- งานของคุณคือใช้แผนจากขั้นตอนที่ 2 เพื่อสร้างโปรเจ็กต์ที่ให้คุณบังคับหุ่นยนต์เพื่อตรวจจับและตอบสนองต่อ AprilTag ID แต่ละตัว โดยแสดงปฏิกิริยาที่แตกต่างกันสำหรับ AprilTag ID แต่ละตัว
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการฝึกฝนของคุณ
- เคล็ดลับ: สร้างและทดสอบโครงการของคุณสำหรับการตอบสนอง AprilTag ID ครั้งละหนึ่งรายการ การทำงานแบบค่อยเป็นค่อยไปจะช่วยให้ค้นหาและแก้ไขข้อผิดพลาดได้ง่ายขึ้นขณะที่คุณทำงาน และช่วยให้แน่ใจว่าโครงการของคุณทำงานได้ตามที่ตั้งใจไว้
ขั้นตอนที่ 4: สำรวจ! สลับไปมาระหว่างการขับรถและการเขียนโค้ดเพื่อทำซ้ำในโครงการของคุณและปรับปรุงมัน
- ลองคิดดูว่าคุณจะใช้ปุ่มควบคุมแบบกำหนดเองอย่างไร มีวิธีอื่นในการบรรลุภารกิจนี้หรือไม่?
- ทดสอบกลยุทธ์การเขียนโค้ดต่างๆ เพื่อค้นหากลยุทธ์ที่เหมาะกับคุณที่สุด
- อย่าลืมบันทึกการวนซ้ำและเหตุผลในการเลือกเขียนโค้ดของคุณไว้ในวารสารของคุณ
ตอนนี้คุณได้ดูและอภิปรายวิดีโอแล้ว ก็ถึงคราวของคุณที่จะฝึกฝนแล้ว!
ขั้นตอนที่ 1: ตั้งค่าฟิลด์ของคุณตามที่แสดงในภาพด้านล่าง โดยวาง AprilTag ID แบบสุ่มในแต่ละมุม
ขั้นตอน 2: ใช้โหมดขับเคลื่อนเพื่อสร้างแบบจำลองการเคลื่อนไหวและวางแผนปฏิกิริยาที่หุ่นยนต์ของคุณจะมีต่อรหัส AprilTag ทั้งสี่รหัส
- งานของคุณคือการขับเคลื่อนหุ่นยนต์เพื่อตรวจจับและตอบสนองต่อ AprilTag ID แต่ละอัน โดยแสดงปฏิกิริยาที่แตกต่างกันสำหรับ AprilTag ID แต่ละอัน บันทึกการขับขี่ของคุณและวางแผนว่าคุณจะกระตุ้นปฏิกิริยาต่างๆ ของคุณอย่างไรด้วยปุ่มควบคุมแบบกำหนดเอง
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการฝึกฝนของคุณ
- เคล็ดลับ: ขณะขับรถ ให้สังเกตว่าปุ่มใดจะช่วยให้สมาชิกแต่ละคนในกลุ่มทำภารกิจต่างๆ ได้ง่ายขึ้น ตัดสินใจว่าคุณจะใช้ปุ่มที่กำหนดเองแบบเดียวกันหรือไม่หรือคุณต้องการมีการควบคุมแยกกัน
ขั้นตอน 3: เขียนโค้ดให้หุ่นยนต์ของคุณทำงานให้สำเร็จ
- งานของคุณคือใช้แผนจากขั้นตอนที่ 2 เพื่อสร้างโปรเจ็กต์ที่ให้คุณบังคับหุ่นยนต์เพื่อตรวจจับและตอบสนองต่อ AprilTag ID แต่ละตัว โดยแสดงปฏิกิริยาที่แตกต่างกันสำหรับ AprilTag ID แต่ละตัว
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการฝึกฝนของคุณ
- เคล็ดลับ: สร้างและทดสอบโครงการของคุณสำหรับการตอบสนอง AprilTag ID ครั้งละหนึ่งรายการ การทำงานแบบค่อยเป็นค่อยไปจะช่วยให้ค้นหาและแก้ไขข้อผิดพลาดได้ง่ายขึ้นขณะที่คุณทำงาน และช่วยให้แน่ใจว่าโครงการของคุณทำงานได้ตามที่ตั้งใจไว้
ขั้นตอนที่ 4: สำรวจ! สลับไปมาระหว่างการขับรถและการเขียนโค้ดเพื่อทำซ้ำในโครงการของคุณและปรับปรุงมัน
- ลองคิดดูว่าคุณจะใช้ปุ่มควบคุมแบบกำหนดเองอย่างไร มีวิธีอื่นในการบรรลุภารกิจนี้หรือไม่?
- ทดสอบกลยุทธ์การเขียนโค้ดต่างๆ เพื่อค้นหากลยุทธ์ที่เหมาะกับคุณที่สุด
- อย่าลืมบันทึกการวนซ้ำและเหตุผลในการเลือกเขียนโค้ดของคุณไว้ในวารสารของคุณ
เตือนนักเรียนถึงความคาดหวังสำหรับการปฏิบัติและการอภิปรายร่วมกันก่อนที่จะเริ่มต้น
แจกบัตรงานขั้นตอนที่ 2 หมายเลข (Google / .docx / .pdf) ให้กับนักเรียนแต่ละคน นักเรียนจะใช้บัตรงานนี้ขณะขับรถและวางแผนโครงการและปฏิกิริยาของพวกเขา เนื่องจากโหมดไดรฟ์ไม่มีปุ่มสำหรับตรวจจับ AprilTags หรือ "ตอบสนอง" นักเรียนจึงควรใช้เวลาในการหารือและบันทึกไม่เพียงแค่ปฏิกิริยาที่พวกเขาต้องการเขียนโค้ดเท่านั้น แต่ การเขียนโค้ดด้วย นักเรียนควรเช็คอินกับคุณเพื่อแบ่งปันแผนการของพวกเขาก่อนที่จะเริ่มเขียนโค้ด
เมื่อคุณเช็คอินกับนักเรียนเกี่ยวกับแผนของพวกเขา ให้แน่ใจว่าแผนของพวกเขามีความเฉพาะเจาะจงและร่วมมือกัน ถามคำถามเช่น:
- คุณเลือกที่จะเขียนโค้ดปุ่มอะไร? คุณตัดสินใจยังไง?
- คุณกำลังตัดสินใจเรื่องใดอยู่? ทำไม?
- คุณจะใช้บล็อคอะไรในการเขียนโค้ดการตัดสินใจเหล่านั้น
แจกบัตรงานขั้นตอนที่ (Google / .docx / .pdf) เมื่อนักเรียนได้แบ่งปันแผนการสอนที่สมบูรณ์กับคุณแล้ว ในขณะที่นักเรียนกำลังสร้างและทดสอบโครงการของตน ให้เดินไปรอบๆ ห้องและอภิปรายเกี่ยวกับกระบวนการและโครงการของตน ถามคำถามเช่น:
- คุณเขียนโค้ดปุ่มอะไรบ้างจนถึงตอนนี้? ขั้นตอนต่อไปของคุณคืออะไร?
- สมาชิกแต่ละกลุ่มใช้การควบคุมแบบกำหนดเองแบบเดียวกันหรือไม่ ทำไมหรือทำไมไม่? แตกต่างกันอย่างไรและเพราะเหตุใด?
- คุณทดสอบโครงการของคุณอย่างไรเพื่อให้แน่ใจว่าทำงานได้ตามที่ตั้งใจไว้?
- หากคุณย้าย ID AprilTags ไปยังตำแหน่งอื่น โปรเจ็กต์ของคุณจะยังคงทำงานได้หรือไม่ ทำไมหรือทำไมไม่?
กระตุ้นให้ผู้เรียนลองใช้กลยุทธ์การเขียนโค้ดที่แตกต่างกันเมื่อต้องทำซ้ำเพื่อปรับปรุงโครงการของตน พวกเขาสามารถทดสอบการเขียนโค้ดปุ่มต่างๆ หรือการเขียนโค้ดการตัดสินใจที่แตกต่างกัน หรือใช้บล็อก If else แทนบล็อก If การสำรวจกลยุทธ์การเขียนโค้ดและการพูดคุยเกี่ยวกับวิธีการและเหตุผลที่พวกเขาเลือกเขียนโค้ดบางอย่าง ถือเป็นการฝึกฝนการคิดวิเคราะห์ที่ดี เช่นเดียวกับการฝึกฝนด้านวิทยาการคอมพิวเตอร์
เพื่อทราบข้อมูลของคุณ
คุณสามารถบันทึกโครงการต่างๆ ลงในหุ่นยนต์ของคุณได้โดยการดาวน์โหลดลงในช่องต่างๆ โดยค่าเริ่มต้น โปรเจ็กต์ VEXcode AIM จะถูกดาวน์โหลดไปที่สล็อต 1 เลือกไอคอนช่องในแถบเครื่องมือ ข้างกล่องโต้ตอบชื่อโครงการ เพื่อเปลี่ยนช่อง

เลือกช่องที่คุณต้องการจากเมนูแบบเลื่อนลง
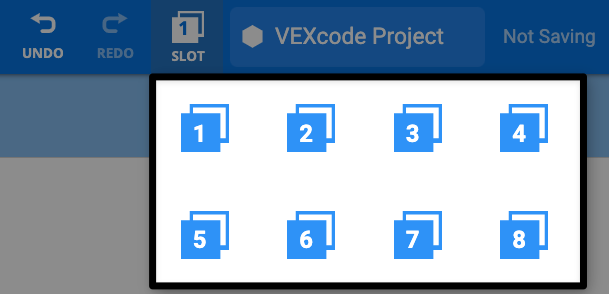
ตอนนี้เมื่อคุณดาวน์โหลดโครงการของคุณ มันจะถูกดาวน์โหลดลงในช่องที่คุณเลือก
สรุป
ตอนนี้คุณได้ทำกิจกรรมเสร็จสิ้นแล้ว ถึงเวลามาแบ่งปันว่าคุณได้นำความรู้ที่ได้เรียนรู้เกี่ยวกับการเขียนโค้ดปุ่มควบคุมแบบกำหนดเองมาปรับใช้กับความท้าทายนี้อย่างไร ตอบคำถามต่อไปนี้ในสมุดบันทึกของคุณเพื่อช่วยให้คุณสะท้อนการเรียนรู้ของคุณและเตรียมพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- อธิบายโครงการของคุณ รวมกลยุทธ์การเขียนโค้ดที่คุณใช้เพื่อปรับแต่งการควบคุมของคุณ
- คุณคิดว่าเหตุใดกลยุทธ์ดังกล่าวจึงประสบความสำเร็จ? ให้หลักฐานจากการสังเกตและบันทึกของคุณ
- โครงการของคุณเปลี่ยนแปลงไปอย่างไรบ้างในระหว่างการปฏิบัติ? ทำไมคุณถึงทำการเปลี่ยนแปลงเหล่านั้น?
- คุณคิดว่าโค้ดคอนโทรลเลอร์แบบกำหนดเองจะมีประโยชน์ในการท้าทาย Capstone หรือไม่ ทำไมหรือทำไมไม่?
ตอนนี้คุณได้ทำกิจกรรมเสร็จสิ้นแล้ว ถึงเวลามาแบ่งปันว่าคุณได้นำความรู้ที่ได้เรียนรู้เกี่ยวกับการเขียนโค้ดปุ่มควบคุมแบบกำหนดเองมาปรับใช้กับความท้าทายนี้อย่างไร ตอบคำถามต่อไปนี้ในสมุดบันทึกของคุณเพื่อช่วยให้คุณสะท้อนการเรียนรู้ของคุณและเตรียมพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- อธิบายโครงการของคุณ รวมกลยุทธ์การเขียนโค้ดที่คุณใช้เพื่อปรับแต่งการควบคุมของคุณ
- คุณคิดว่าเหตุใดกลยุทธ์ดังกล่าวจึงประสบความสำเร็จ? ให้หลักฐานจากการสังเกตและบันทึกของคุณ
- โครงการของคุณเปลี่ยนแปลงไปอย่างไรบ้างในระหว่างการปฏิบัติ? ทำไมคุณถึงทำการเปลี่ยนแปลงเหล่านั้น?
- คุณคิดว่าโค้ดคอนโทรลเลอร์แบบกำหนดเองจะมีประโยชน์ในการท้าทาย Capstone หรือไม่ ทำไมหรือทำไมไม่?
ให้คำแนะนำนักเรียนในการแบ่งปันการเรียนรู้และโครงการของพวกเขาในการอภิปรายทั้งชั้นเรียน เชิญนักเรียนมาสาธิตโครงการของพวกเขาและแสดงโค้ดเพื่อให้พวกเขาสามารถอธิบายตัวเลือกที่พวกเขาเลือกสำหรับชั้นเรียนได้
ใช้คำถามที่นักเรียนตอบไว้ในสมุดบันทึกเป็นจุดเริ่มต้นสำหรับการแบ่งปันและการอภิปราย กระตุ้นให้นักเรียนเปรียบเทียบและแสดงความแตกต่างระหว่างโครงการของตนกับผู้อื่นในชั้นเรียน และพูดคุยกันว่าโครงการเหล่านั้นแตกต่างกันอย่างไรและเพราะเหตุใด ถามคำถามเช่น:
- หากคุณจะทำโครงการนี้อีกครั้ง กลยุทธ์การปรับแต่งของคุณจะเปลี่ยนไปหรือไม่ ทำไมหรือทำไมไม่?
- คุณคิดว่าคุณสามารถเขียนโค้ดตัวควบคุมของคุณให้บรรลุพฤติกรรมอื่น ๆ อะไรได้บ้าง?
- เมื่อคิดล่วงหน้าถึง Capstone คุณคิดว่าจะนำการเรียนรู้นี้ไปประยุกต์ใช้เพื่อปรับปรุงทักษะการขับขี่ของคุณได้อย่างไร
กระตุ้นให้ผู้เรียนเชื่อมโยงประเด็นในการอภิปรายกลับไปยังเป้าหมายการเรียนรู้ที่พวกเขาสร้างร่วมกันในตอนเริ่มต้นของหน่วย โปรดทราบว่าหากมีพื้นที่ใดที่คุณต้องการทบทวนในคำแนะนำของคุณก่อนที่จะดำเนินการกับความท้าทาย Capstone ไม่แน่ใจว่าจะเสริมการสอนของคุณในลักษณะนี้ได้อย่างไร? กำหนดตารางเซสชันแบบ 1 ต่อ 1 เพื่อรับการสนับสนุนการวางแผนส่วนบุคคล
เลือก กลับไปยังหน่วย > เพื่อกลับไปยังหน่วยทั้งหมด