
레슨 2: 여러 개의 [대기까지] 블록 사용
-
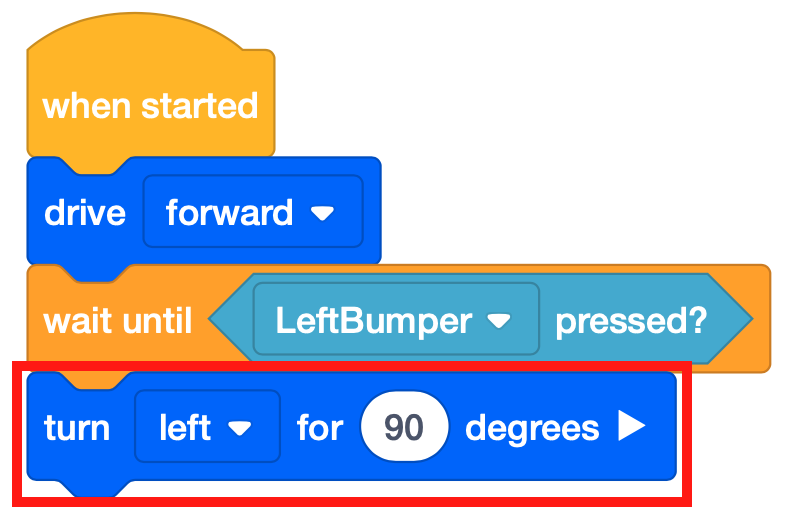
벽 미로 놀이터을 통과하려면 VR 로봇이 벽과 충돌할 때 방향을 바꾸고 계속 주행해야 합니다. [주행정지] 블록을 제거하고 [회전] 블록으로 교체합니다. [회전] 매개변수를 "왼쪽"으로 변경합니다.
- 아직 열려 있지 않으면 Wall Maze Playground 을 실행하고 프로젝트를 실행하세요.
-
VR 로봇이 벽 미로의 시작 부분에서 주행하다가 범퍼 센서가 벽에 닿으면 멈추고 왼쪽으로 90도 회전하는 모습을 지켜보세요.

-
동일한 프로젝트에서 여러 개의 [대기] 블록을 사용할 수 있습니다. VR 로봇의 현재 위치에서 출발하여, 벽 미로를 해결하기 위한 다음 단계는 다음 벽으로 가서 오른쪽으로 90도 회전하는 것입니다. 기존 블록 스택을 복제하여 스택 맨 아래에 추가할 수 있습니다. 두 번째 [회전] 블록을 왼쪽에서 오른쪽으로 바꾸는 걸 잊지 마세요.

- 벽 미로 놀이터 을 재설정하고 프로젝트를 다시 실행합니다.
-
VR 로봇이 벽 미로의 시작 부분에서 주행하다가 범퍼 센서가 벽에 닿으면 멈추고, 왼쪽으로 90도 회전한 후 범퍼 센서가 다시 벽에 닿을 때까지 앞으로 주행한 다음 오른쪽으로 90도 회전하고 멈추는 모습을 지켜보세요.
미니 챌린지
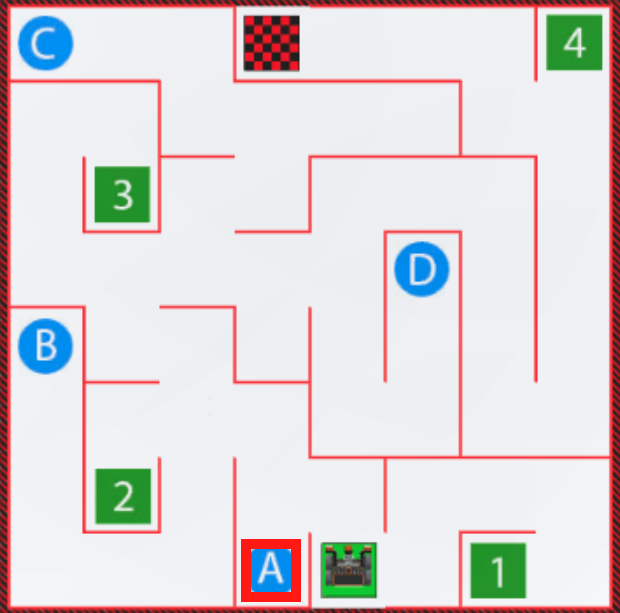
이 미니 챌린지에서는 여러 개의 [대기까지] 블록과 범퍼 센서를 사용하여 VR 로봇이 벽 미로 놀이터 의 시작 지점에서 문자 'A'까지 주행하는 프로젝트를 만들어 보세요!
미니 챌린지를 완료하려면 다음 단계를 따르세요.
-
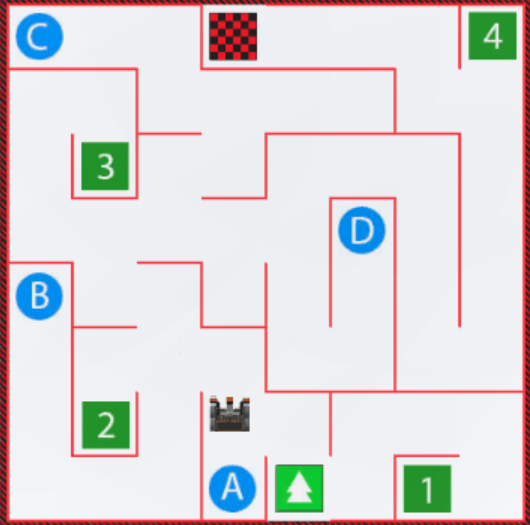
아래의 솔루션 영상을 시청하여 미니 챌린지를 완료하기 위해 VR 로봇이 어떻게 운전해야 하는지 알아보세요. 이 영상 클립에서 VR 로봇은 놀이터 중앙 하단에서 시작합니다. 범퍼 센서가 반대편 벽에 닿을 때까지 앞으로 주행한 다음, 왼쪽으로 돌아 앞에 있는 다음 벽으로 주행합니다. 범퍼가 벽에 닿으면 로봇은 다시 왼쪽으로 돌아 마지막 벽과 문자 A에 도달할 때까지 전진합니다.
- Unit4Lesson2 프로젝트에 필요한 블록을 추가하거나 제거하여 프로젝트를 만듭니다. VEXcode 블록, Switch 블록 또는 두 가지 블록 유형을 조합하여 프로젝트를 만들 수 있다는 점을 기억하세요.
- 프로젝트를 시작하여 테스트해 보세요.
- 프로젝트가 성공적이지 않으면, 편집하고 다시 시도하세요. VR 로봇이 처음부터 'A' 문자까지 성공적으로 주행할 때까지 프로젝트를 계속 수정하고 실행합니다.
- VR 로봇이 처음부터 'A' 문자까지 성공적으로 주행하면 프로젝트를 저장합니다.
축하해요! 미니 챌린지를 해결했습니다!