
Lição 2: Usando vários blocos [Aguarde até]
-
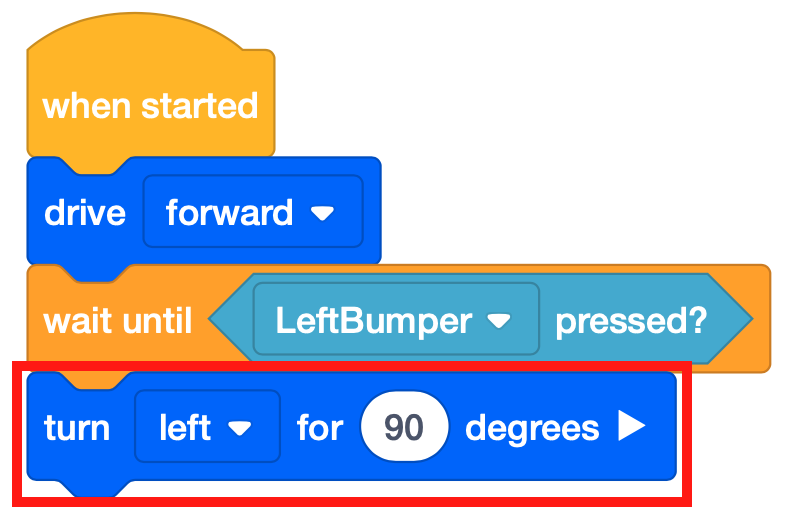
Para dirigir pelo Wall Maze Playground, o robô VR precisará virar e continuar dirigindo quando houver uma colisão com uma parede. Remova o bloco [Stop driving] e substitua-o por um bloco [Turn for]. Altere o parâmetro [Turn for] para "left".
- Inicie o Wall Maze Playground, se ainda não estiver aberto, e execute o projeto.
-
Observe o robô VR dirigir desde o início do labirinto de parede, pare quando o sensor de pára-choques for pressionado pela parede e vire à esquerda 90 graus.

-
Vários blocos [Aguarde até] podem ser usados no mesmo projeto. A partir da posição atual deste Robô de RV, o próximo passo para resolver o Labirinto da Parede seria avançar para a próxima parede e virar à direita 90 graus. A pilha de blocos existente pode ser duplicada e adicionada à parte inferior da pilha. Lembre-se de alterar o segundo bloco [Turn for] da esquerda para a direita.

- Redefina o Wall Maze Playground e execute o projeto novamente.
-
Observe o robô VR dirigir desde o início do labirinto de parede, pare quando o sensor de pára-choques for pressionado pela parede, vire à esquerda 90 graus, dirija para frente até que o sensor de pára-choques seja novamente pressionado por uma parede, vire à direita 90 graus e pare.

Mini Desafio
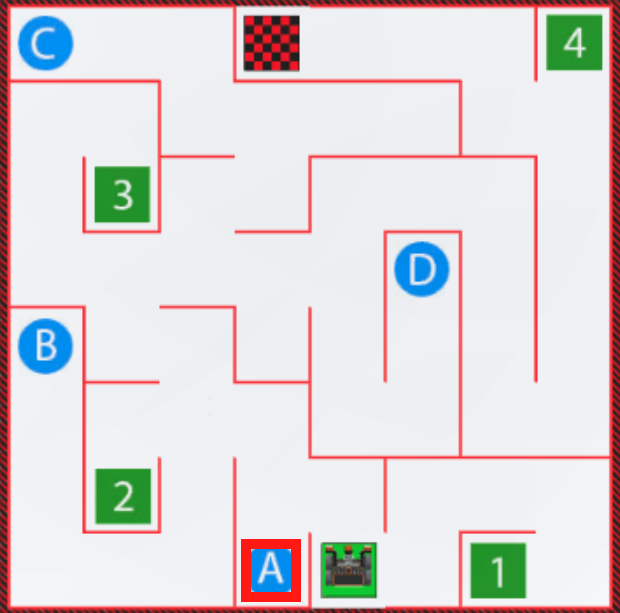
Para este mini desafio, crie um projeto em que o robô de RV dirija do início até a letra ‘A’ no Wall Maze Playground usando vários blocos [Wait until] e o Bumper Sensor!
Siga estas etapas para concluir o mini desafio:
-
Assista ao vídeo da solução abaixo para ver como o robô VR deve dirigir para completar o mini desafio. Neste videoclipe, o Robô VR começa no início, na parte inferior central do Playground. Ele avança até que o Sensor do Para-choque seja pressionado pela parede oposta, depois vira à esquerda e segue para a próxima parede à sua frente. Quando o Para-choque é pressionado nessa parede, o robô vira à esquerda novamente e avança até atingir a parede final e a letra A.
- Crie um projeto adicionando ou removendo os blocos necessários ao projeto Unit4Lesson2. Lembre-se de que você pode usar blocos VEXcode, blocos Switch ou uma combinação dos dois tipos de blocos para criar o seu projeto.
- Inicie o projeto para testá-lo.
- Se o projeto não for bem-sucedido, edite e tente novamente. Continue a revisar e executar o projeto até que o Robô VR conduza com sucesso do início à letra ‘A’.
- Salve o projeto assim que o robô de RV conduzir com sucesso do início à letra ‘A’.
Parabéns! Você resolveu o mini desafio!
Perguntas
Selecione uma ligação abaixo para aceder ao questionário da aula.
Google Doc / .docx / .pdf