
പാഠം 2: ഒന്നിലധികം [വരെ കാത്തിരിക്കുക] ബ്ലോക്കുകൾ ഉപയോഗിക്കുന്നു
-
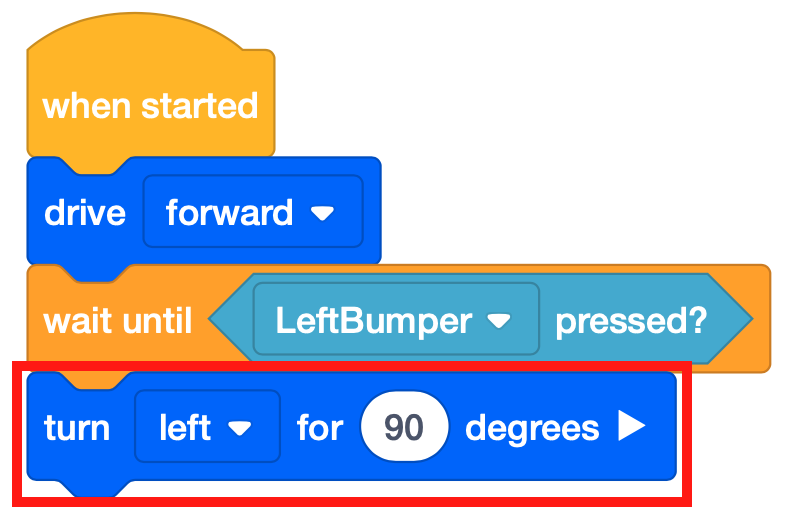
Wall Maze Playgroundലൂടെ വാഹനമോടിക്കാൻ, ഒരു മതിലുമായി കൂട്ടിയിടിക്കുമ്പോൾ VR റോബോട്ട് തിരിഞ്ഞും മറിഞ്ഞും വാഹനമോടിക്കേണ്ടതുണ്ട്. [സ്റ്റോപ്പ് ഡ്രൈവിംഗ്] ബ്ലോക്ക് നീക്കം ചെയ്ത് പകരം [ടേൺ ഫോർ] ബ്ലോക്ക് സ്ഥാപിക്കുക. [Turn for] പാരാമീറ്റർ “ഇടത്” ആക്കുക.
- Wall Maze Playground തുറന്നിട്ടില്ലെങ്കിൽ അത് സമാരംഭിച്ച് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
-
വാൾ മെയ്സിന്റെ തുടക്കം മുതൽ VR റോബോട്ട് ഡ്രൈവ് ചെയ്യുന്നത് കാണുക, ബമ്പർ സെൻസർ ഭിത്തിയിൽ അമർത്തുമ്പോൾ നിർത്തുക, തുടർന്ന് 90 ഡിഗ്രി ഇടത്തേക്ക് തിരിയുക.

-
ഒരേ പ്രോജക്റ്റിൽ ഒന്നിലധികം [Wait until] ബ്ലോക്കുകൾ ഉപയോഗിക്കാൻ കഴിയും. ഈ വിആർ റോബോട്ടിന്റെ നിലവിലെ സ്ഥാനത്ത് നിന്ന് ആരംഭിച്ച്, വാൾ മെയ്സ് പരിഹരിക്കുന്നതിനുള്ള അടുത്ത ഘട്ടം അടുത്ത മതിലിലേക്ക് മുന്നോട്ട് പോയി 90 ഡിഗ്രി വലത്തേക്ക് തിരിയുക എന്നതാണ്. നിലവിലുള്ള ബ്ലോക്കുകളുടെ ഡ്യൂപ്ലിക്കേറ്റ് ഉണ്ടാക്കി സ്റ്റാക്കിന്റെ അടിയിൽ ചേർക്കാൻ കഴിയും. രണ്ടാമത്തെ [ടേൺ ഫോർ] ബ്ലോക്ക് ഇടത്തുനിന്ന് വലത്തോട്ട് മാറ്റാൻ ഓർമ്മിക്കുക.

- Wall Maze Playground പുനഃസജ്ജമാക്കി പ്രോജക്റ്റ് വീണ്ടും പ്രവർത്തിപ്പിക്കുക.
-
വാൾ മെയ്സിന്റെ തുടക്കം മുതൽ VR റോബോട്ട് ഡ്രൈവ് ചെയ്യുന്നത് കാണുക, ബമ്പർ സെൻസർ ഭിത്തിയിൽ അമർത്തുമ്പോൾ നിർത്തുക, 90 ഡിഗ്രി ഇടത്തേക്ക് തിരിയുക, ബമ്പർ സെൻസർ വീണ്ടും ഒരു ഭിത്തിയിൽ അമർത്തുന്നതുവരെ മുന്നോട്ട് ഡ്രൈവ് ചെയ്യുക, തുടർന്ന് 90 ഡിഗ്രി വലത്തേക്ക് തിരിഞ്ഞ് നിർത്തുക.
മിനി ചലഞ്ച്
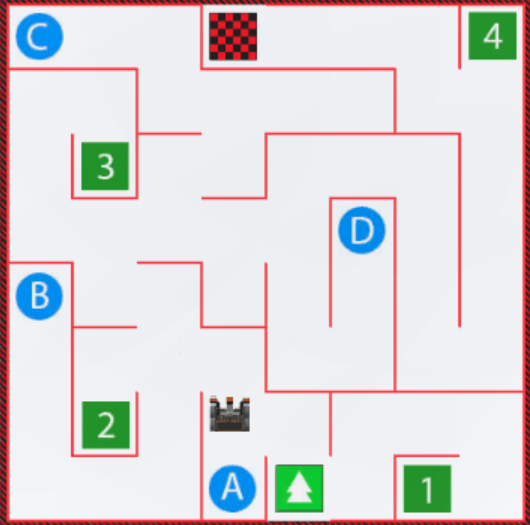
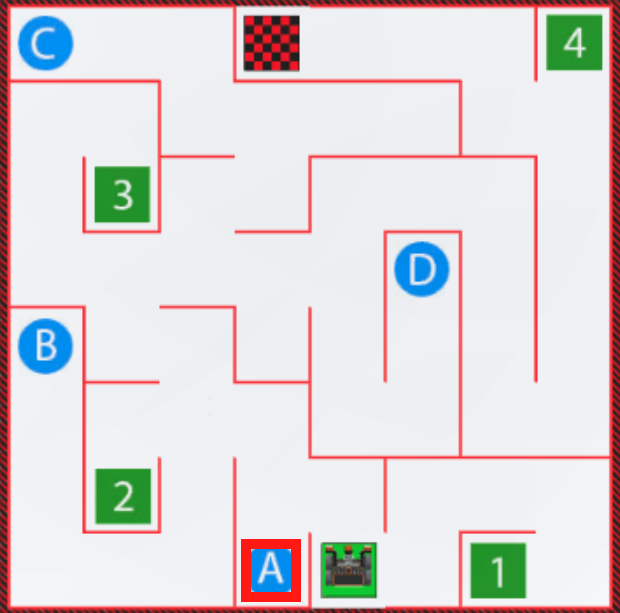
ഈ മിനി ചലഞ്ചിനായി, ഒന്നിലധികം [Wait until] ബ്ലോക്കുകളും ബമ്പർ സെൻസറും ഉപയോഗിച്ച് Wall Maze Playground ൽ VR റോബോട്ട് തുടക്കം മുതൽ 'A' എന്ന അക്ഷരത്തിലേക്ക് ഡ്രൈവ് ചെയ്യുന്ന ഒരു പ്രോജക്റ്റ് സൃഷ്ടിക്കുക!
മിനി ചലഞ്ച് പൂർത്തിയാക്കാൻ ഈ ഘട്ടങ്ങൾ പാലിക്കുക:
-
മിനി ചലഞ്ച് പൂർത്തിയാക്കാൻ വിആർ റോബോട്ട് എങ്ങനെ ഡ്രൈവ് ചെയ്യണമെന്ന് കാണാൻ താഴെയുള്ള പരിഹാര വീഡിയോ കാണുക. ഈ വീഡിയോ ക്ലിപ്പിൽ, പ്ലേഗ്രൗണ്ടിന്റെ താഴത്തെ മധ്യഭാഗത്ത് വിആർ റോബോട്ട് ആരംഭിക്കുന്നു. ബമ്പർ സെൻസർ എതിർവശത്തെ ഭിത്തിയിൽ അമർത്തുന്നതുവരെ അത് മുന്നോട്ട് നീങ്ങുന്നു, തുടർന്ന് ഇടത്തേക്ക് തിരിഞ്ഞ് അതിനു മുന്നിലുള്ള അടുത്ത ഭിത്തിയിലേക്ക് നീങ്ങുന്നു. ആ ഭിത്തിയിൽ ബമ്പർ അമർത്തുമ്പോൾ, റോബോട്ട് വീണ്ടും ഇടത്തേക്ക് തിരിഞ്ഞ് അവസാന ഭിത്തിയിലും A എന്ന അക്ഷരത്തിലും എത്തുന്നതുവരെ മുന്നോട്ട് നീങ്ങുന്നു.
- Unit4Lesson2 പ്രോജക്റ്റിലേക്ക് ആവശ്യമായ ബ്ലോക്കുകൾ ചേർത്തോ നീക്കം ചെയ്തോ ഒരു പ്രോജക്റ്റ് സൃഷ്ടിക്കുക. നിങ്ങളുടെ പ്രോജക്റ്റ് സൃഷ്ടിക്കാൻ നിങ്ങൾക്ക് VEXcode ബ്ലോക്കുകൾ, സ്വിച്ച് ബ്ലോക്കുകൾ അല്ലെങ്കിൽ രണ്ട് ബ്ലോക്ക് തരങ്ങളുടെയും സംയോജനം ഉപയോഗിക്കാമെന്ന് ഓർമ്മിക്കുക.
- അത് പരീക്ഷിക്കുന്നതിനായി പ്രോജക്റ്റ് ആരംഭിക്കുക.
- പ്രോജക്റ്റ് വിജയിച്ചില്ലെങ്കിൽ, എഡിറ്റ് ചെയ്ത് വീണ്ടും ശ്രമിക്കുക. വി.ആർ. റോബോട്ട് തുടക്കം മുതൽ 'A' എന്ന അക്ഷരത്തിലേക്ക് വിജയകരമായി നീങ്ങുന്നത് വരെ പദ്ധതി പരിഷ്കരിച്ച് പ്രവർത്തിപ്പിക്കുന്നത് തുടരുക.
- വി.ആർ. റോബോട്ട് തുടക്കം മുതൽ 'A' എന്ന അക്ഷരത്തിലേക്ക് വിജയകരമായി ഡ്രൈവ് ചെയ്തുകഴിഞ്ഞാൽ പ്രോജക്റ്റ് സേവ് ചെയ്യുക.
അഭിനന്ദനങ്ങൾ! നിങ്ങൾ മിനി ചലഞ്ച് പരിഹരിച്ചു!
ചോദ്യങ്ങൾ
പാഠ ക്വിസ് ആക്സസ് ചെയ്യുന്നതിന് താഴെയുള്ള ലിങ്ക് തിരഞ്ഞെടുക്കുക.