
1과: 정사각형 그리기
move 명령은 VR 로봇에서 펜 도구를 위아래로 움직입니다. 이 예제에서는 VR 로봇이 아트 캔버스 놀이터에 사각형을 그립니다.
- 새로운 텍스트 프로젝트 템플릿은 drive_for 명령으로 시작합니다. 해당 명령을 제거하고 move 명령을 끌어서 입력하거나 복사하여 프로젝트를 시작하세요.
def main():
pen.move(아래로)
귀하의 정보를 위해
move명령은 VR 로봇에서 펜 도구를 집어 올리고 내려놓는 데 사용할 수 있습니다.
- drive_for 명령을 끌어다 놓거나 입력하거나 복사하여 move명령 아래에 놓습니다. drive_for명령의 매개변수를 600밀리미터(mm) 전진으로 설정합니다.
def main():
pen.move(아래로)
drivetrain.drive_for(전진, 600, MM)
프로젝트는 위와 같이 표시되어야 합니다.
- 다음으로, turn_for명령을 끌어다 놓거나 입력하거나 복사하여 drive_for 명령 뒤에 놓습니다. turn_for명령의 매개변수를 설정하여 오른쪽으로 90도 회전합니다.
def main():
pen.move(아래로)
drivetrain.drive_for(전진, 600, MM)
drivetrain.turn_for(오른쪽, 90, 도)
프로젝트는 위와 같이 표시되어야 합니다.
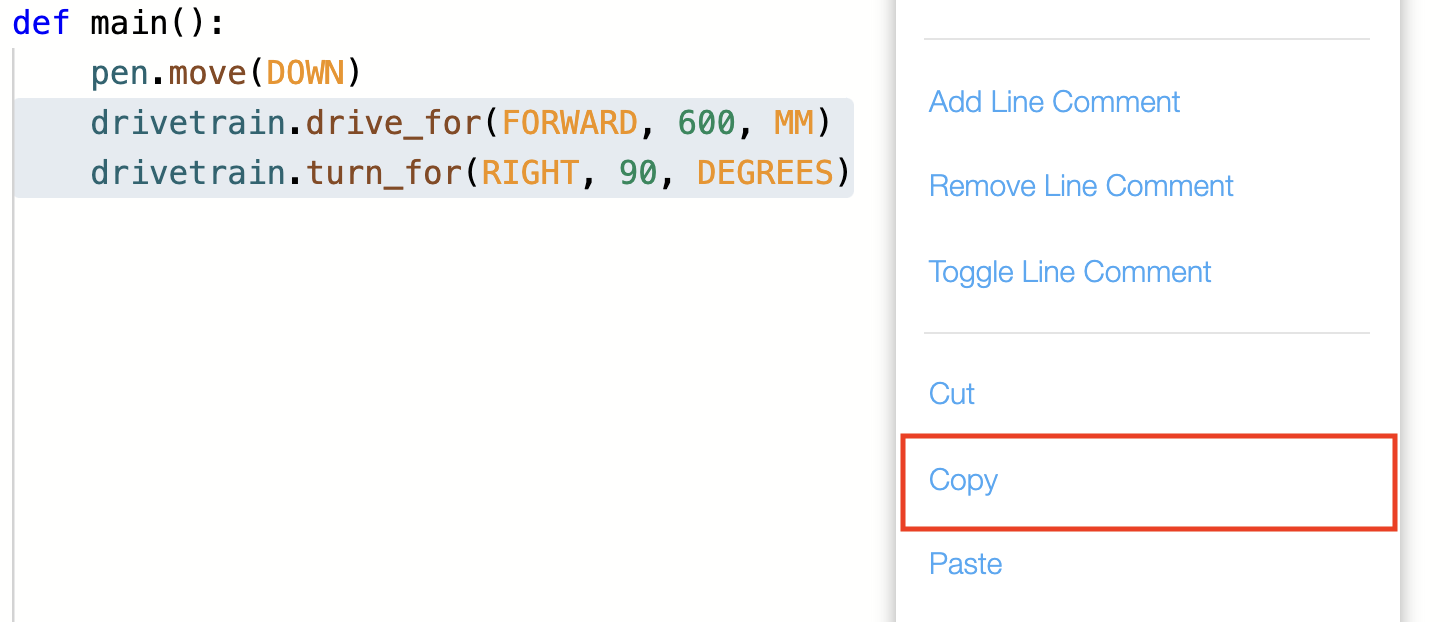
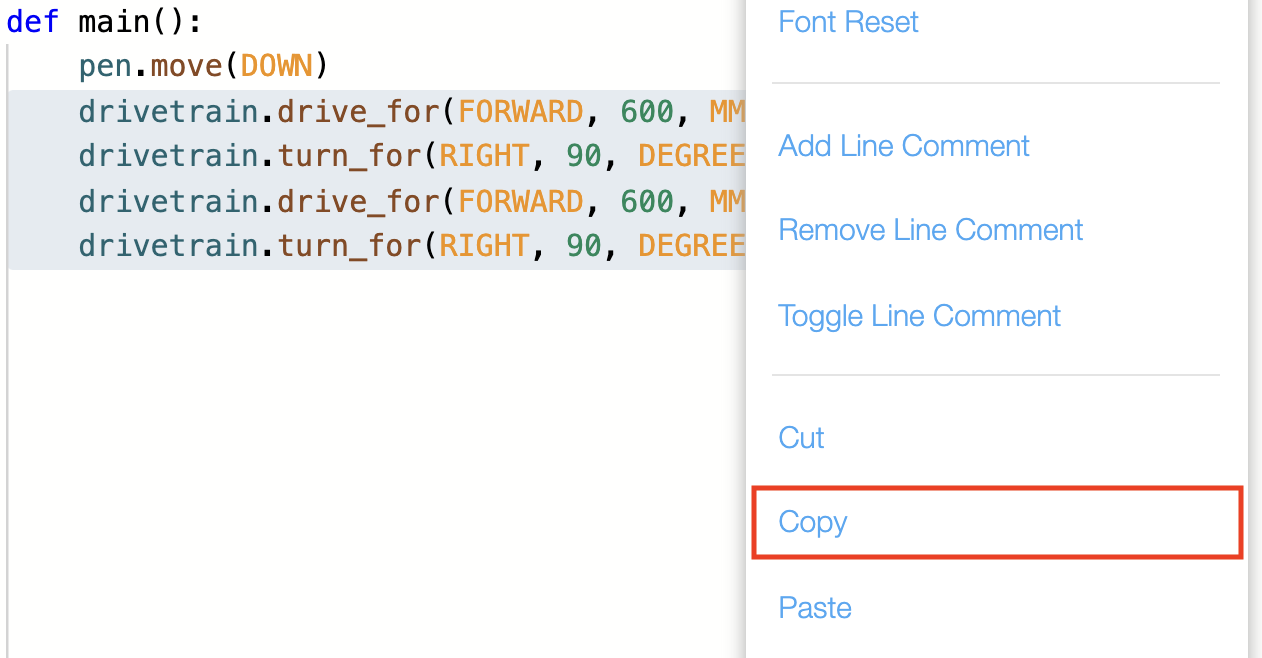
- 정사각형의 두 번째 면을 그리려면 drive_for및 turn_for 명령을 복사합니다. 복사하려면 drive_for및turn_for명령을 강조 표시합니다. 명령을 마우스 오른쪽 버튼으로 클릭하거나 길게 눌러 "복사"를 선택하세요. 그런 다음 명령 아래를 마우스 오른쪽 버튼으로 클릭하거나 길게 눌러 "붙여넣기"를 선택하세요.
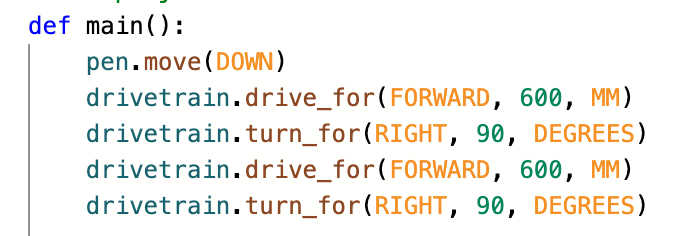
- 추가 drive_for및 turn_for명령이 이제 스택에 추가되었습니다. 이렇게 하면 정사각형의 처음 두 면이 생성됩니다.
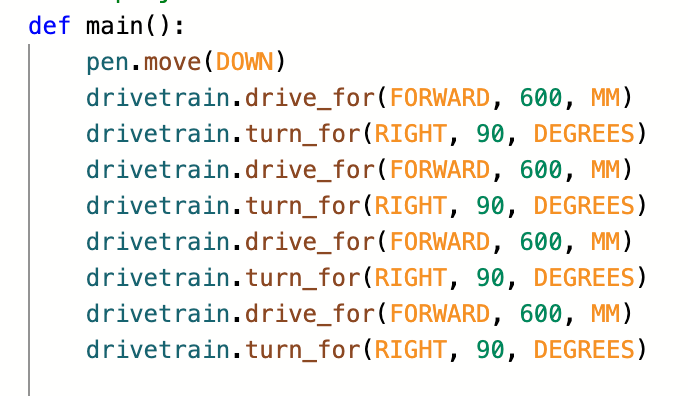
- 정사각형의 마지막 두 면을 그리려면 drive_for과 turn_for명령을 복사합니다. 4개의 명령을 모두 강조 표시한 다음 마우스 오른쪽 버튼을 클릭하거나 길게 눌러 "복사"를 선택합니다. 강조된 명령 아래를 마우스 오른쪽 버튼으로 클릭하거나 길게 눌러 "붙여넣기"를 선택하세요.
- 그러면 명령이 복제되어 정사각형의 마지막 두 면이 생성됩니다.
- 아직 열려 있지 않으면 "Playground 열기" 버튼을 선택하여 Playground 창을 엽니다.

- 아트 캔버스 놀이터가 열리는지 확인하세요.
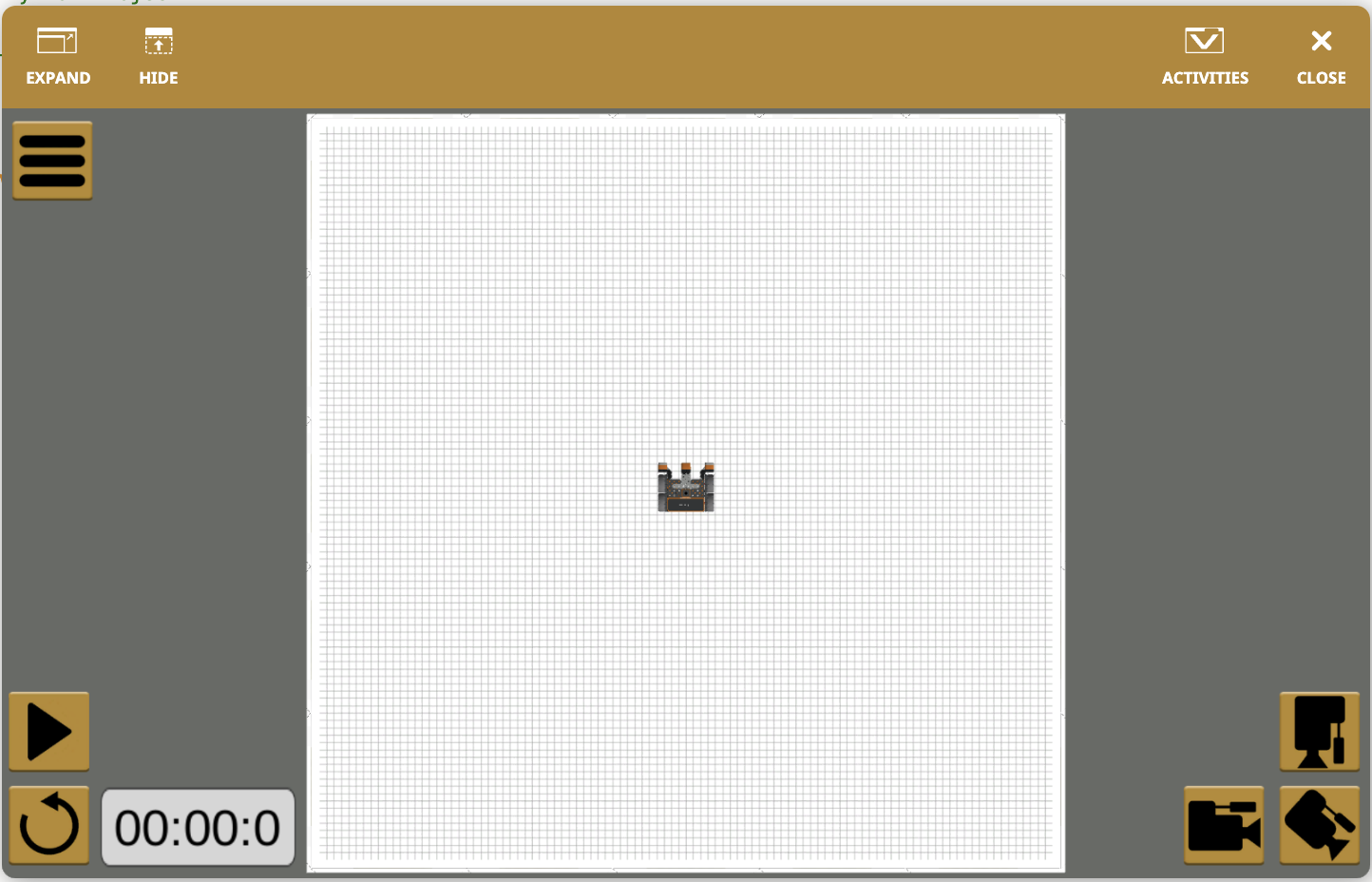
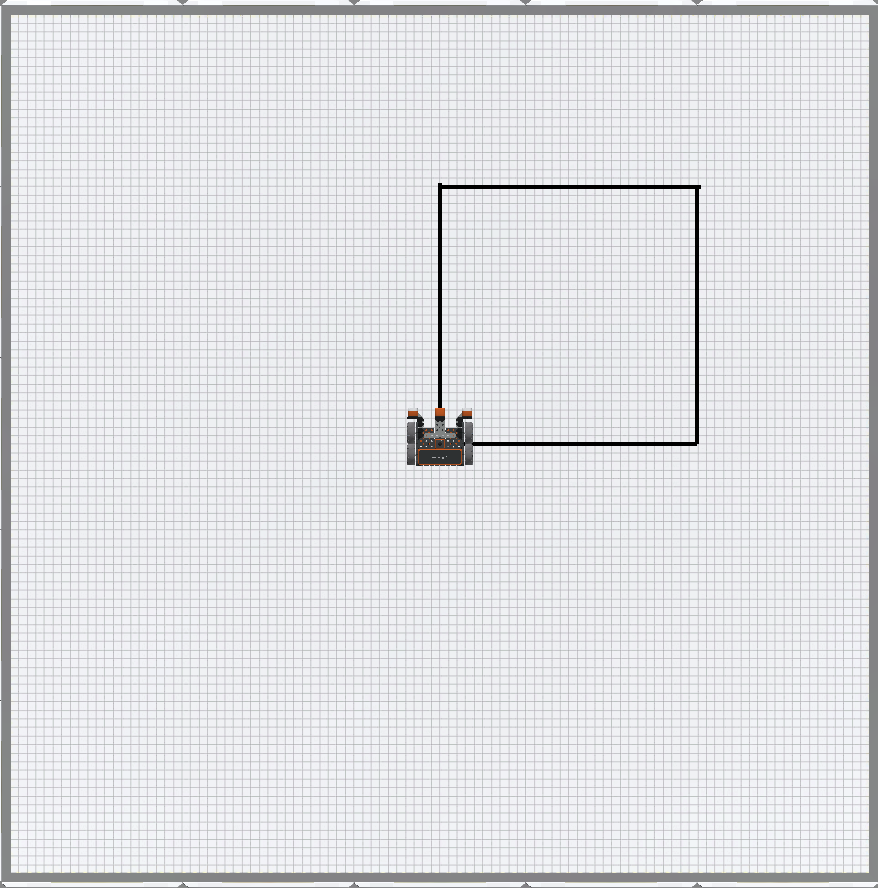
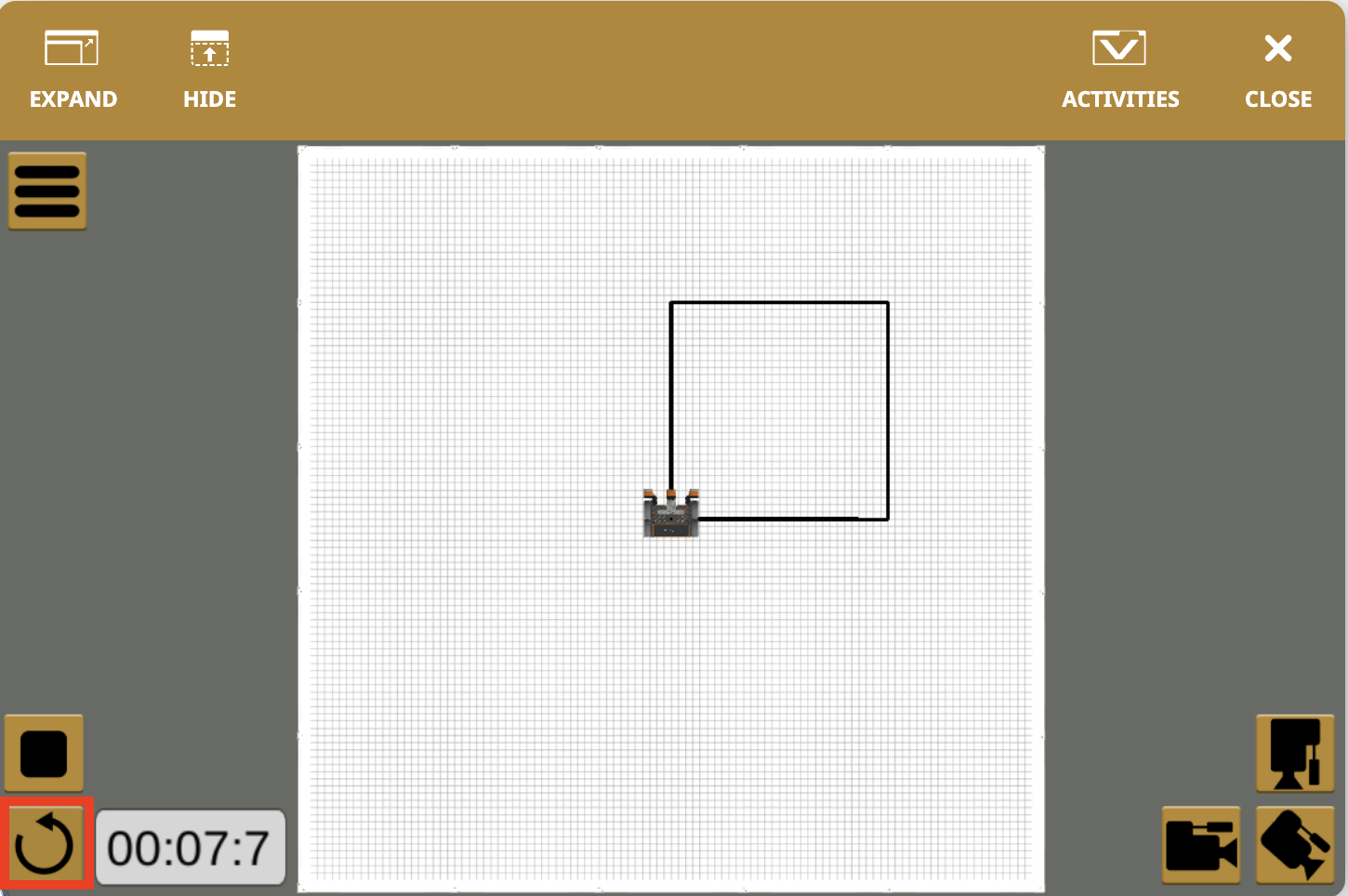
- 프로젝트를 테스트하려면 "시작" 버튼을 선택하세요.

- VR 로봇은 600밀리미터(mm)만큼 앞으로 주행한 후 펜 도구로 그림을 그리면서 오른쪽으로 90도 회전합니다. VR 로봇은 이러한 동작을 4번 반복하여 정사각형의 네 변을 모두 그립니다.
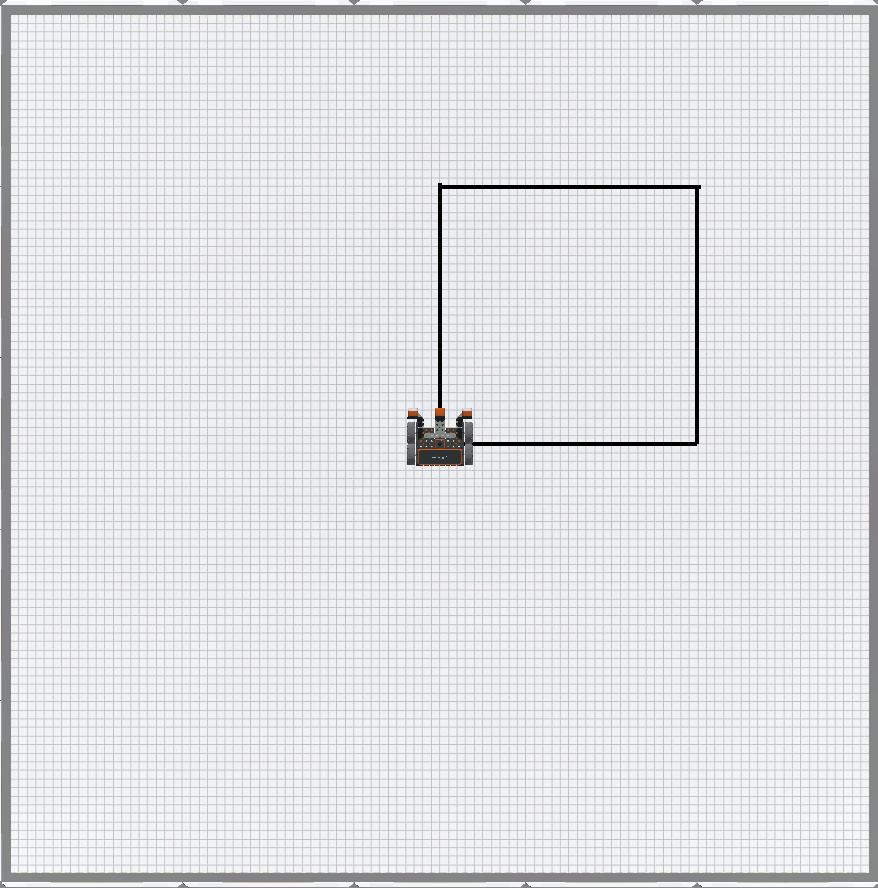
- "재설정" 버튼을 선택하면 놀이터가 재설정되고 VR 로봇이 시작 위치로 돌아갑니다.
귀하의 정보를 위해
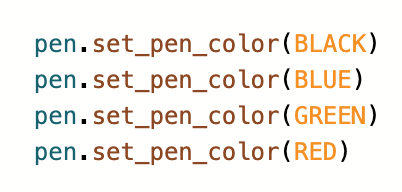
set_pen_color 명령을 사용하면 펜의 색상을 변경할 수 있습니다. 펜은 검정, 파랑, 초록, 빨강의 4가지 색상 중 하나로 설정할 수 있습니다.
이 강의의 나머지 부분을 계속하려면 다음 버튼을 선택하세요.