
पाठ 1: एक वर्ग बनाएँ
मूव कमांड वीआर रोबोट पर पेन टूल को ऊपर और नीचे ले जाता है। इस उदाहरण में वीआर रोबोट आर्ट कैनवास खेल के मैदानपर एक वर्ग बनाएगा।
- नया टेक्स्ट प्रोजेक्ट टेम्पलेट drive_for कमांड से शुरू होता है। उस कमांड को हटा दें, और अपने प्रोजेक्ट को शुरू करने के लिए move कमांड को खींचें, टाइप करें या कॉपी करें।
def main():
pen.move(DOWN)
आपकी जानकारी के लिए
मूवकमांड का उपयोग वीआर रोबोट पर पेन टूल को उठाने और नीचे रखने के लिए किया जा सकता है।
- drive_for कमांड को खींचें, टाइप करें या कॉपी करें और इसे moveकमांड के नीचे रखें। 600 मिलीमीटर (मिमी) आगे ड्राइव करने के लिए drive_forकमांड के पैरामीटर सेट करें।
def main():
pen.move(DOWN)
drivetrain.drive_for(FORWARD, 600, MM)
आपका प्रोजेक्ट ऊपर जैसा दिखाई देना चाहिए।
- इसके बाद, turn_forकमांड को खींचें, टाइप करें या कॉपी करें और इसे drive_for कमांड के बाद रखें। turn_forकमांड के पैरामीटर को 90 डिग्री दाएं मुड़ने के लिए सेट करें।
def main():
pen.move(DOWN)
drivetrain.drive_for(FORWARD, 600, MM)
drivetrain.turn_for(RIGHT, 90, DEGREES)
आपका प्रोजेक्ट ऊपर जैसा दिखाई देना चाहिए।
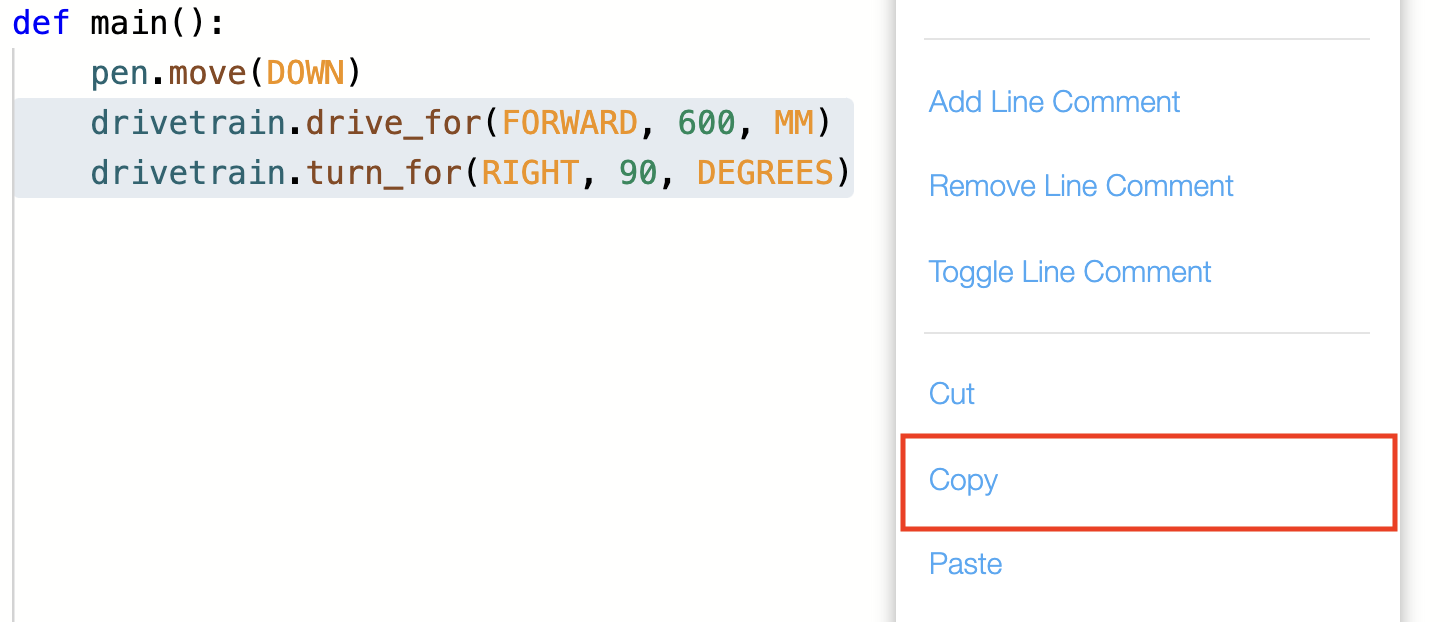
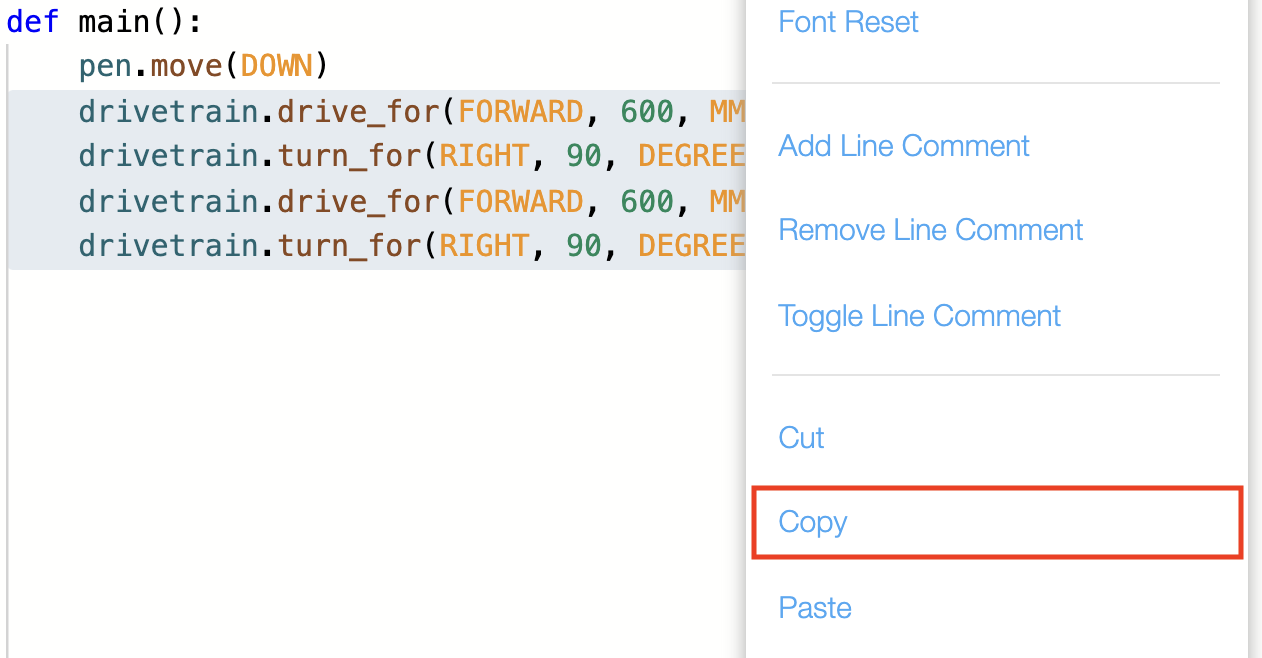
- वर्ग की दूसरी भुजा खींचने के लिए, drive_forऔर turn_for कमांड की प्रतिलिपि बनाएँ। कॉपी करने के लिए, drive_forऔरturn_forकमांड को हाइलाइट करें। कमांड पर राइट क्लिक करें या देर तक दबाएँ, और "कॉपी" चुनें। फिर कमांड के नीचे राइट क्लिक करें या देर तक दबाएँ और "पेस्ट" चुनें।
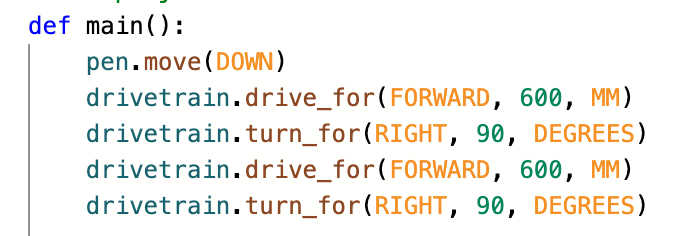
- अतिरिक्त drive_forऔर turn_forकमांड अब स्टैक में जोड़ दिए गए हैं। इससे वर्ग की पहली दो भुजाएँ बनती हैं।
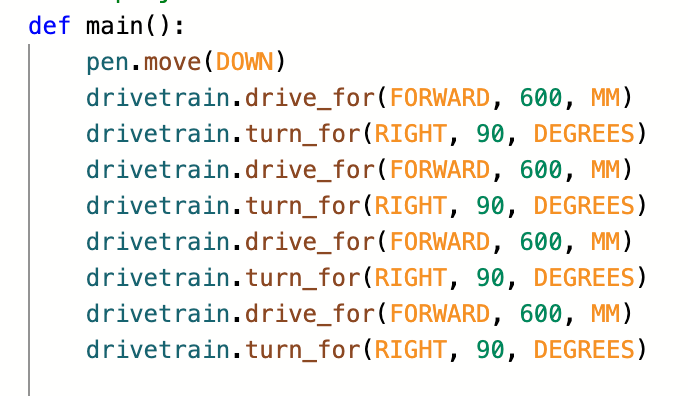
- वर्ग की अंतिम दो भुजाएँ खींचने के लिए, drive_forऔर turn_forकमांड की प्रतिलिपि बनाएँ। सभी चार कमांड को हाइलाइट करें, फिर राइट क्लिक करें या लंबे समय तक दबाएं, और "कॉपी करें" का चयन करें। हाइलाइट किए गए कमांड के नीचे राइट क्लिक करें या देर तक दबाएँ और "पेस्ट" चुनें।
- इसके बाद कमांड्स की प्रतिलिपि बनाई जाएगी और वर्ग की अंतिम दो भुजाएं बनाई जाएंगी।
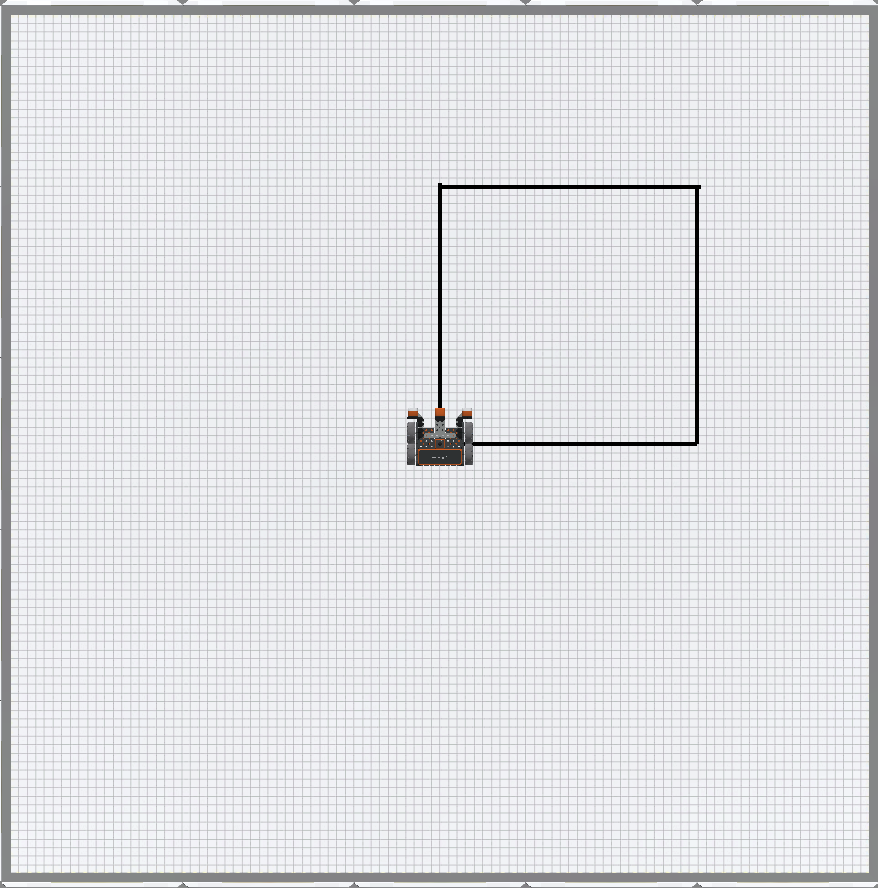
- यदि प्लेग्राउंड विंडो पहले से खुली नहीं है, तो उसे खोलने के लिए “ओपन प्लेग्राउंड” बटन का चयन करें।

- सुनिश्चित करें किआर्ट कैनवस प्लेग्राउंडखुलता है।
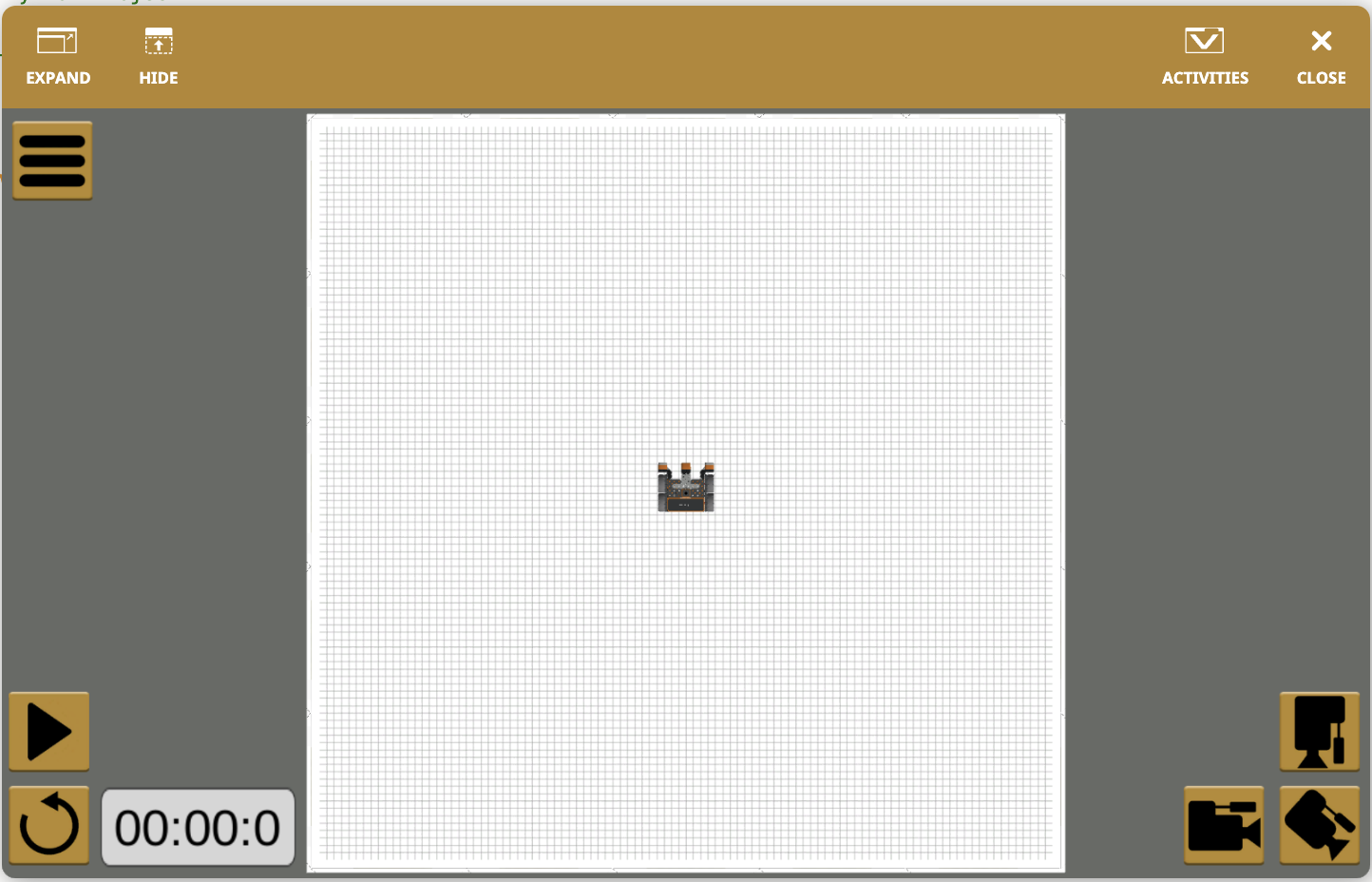
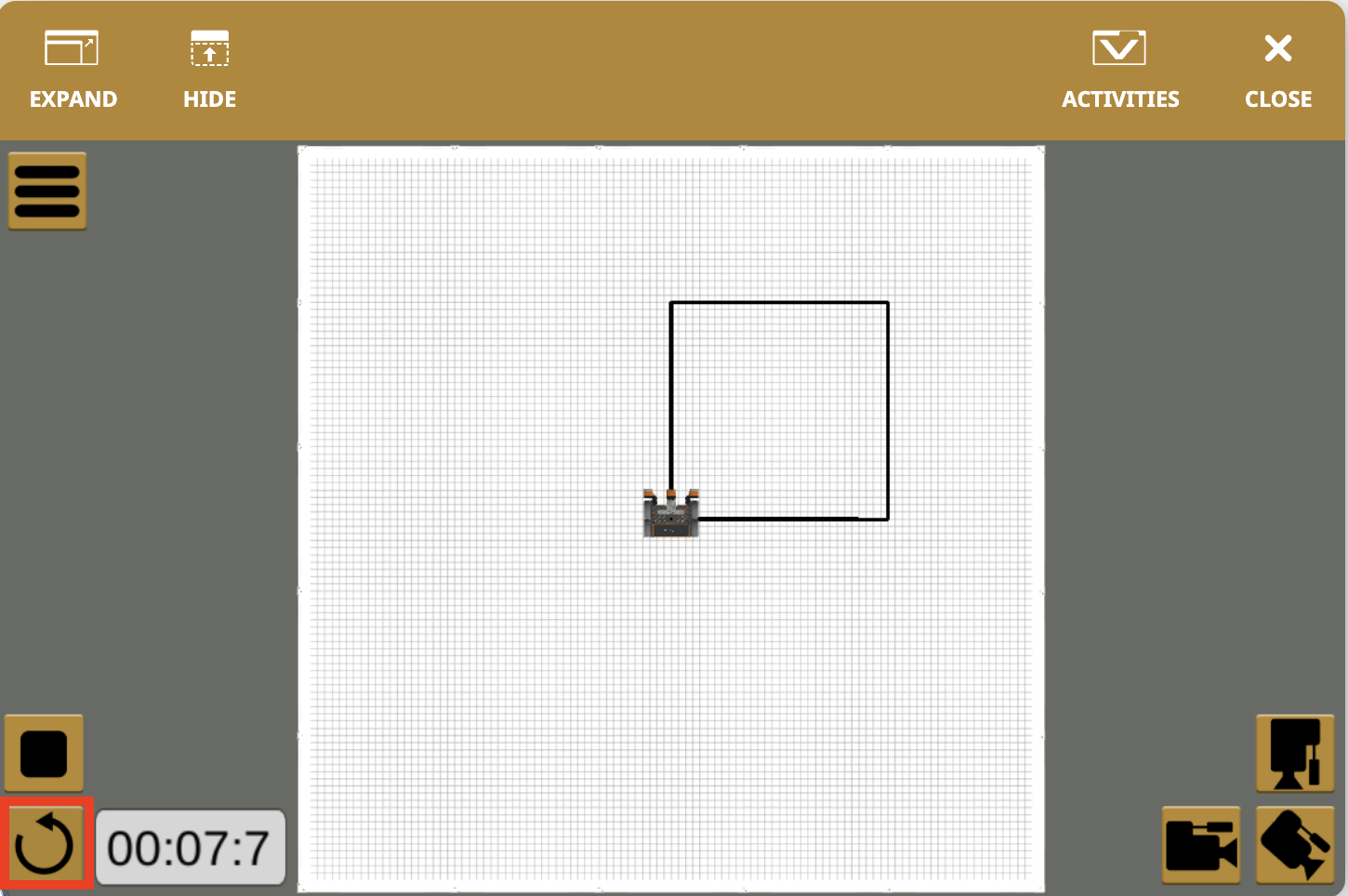
- प्रोजेक्ट का परीक्षण करने के लिए “प्रारंभ” बटन का चयन करें।

- वीआर रोबोट 600 मिलीमीटर (मिमी) तक आगे बढ़ेगा और फिर पेन टूल से ड्राइंग करते हुए 90 डिग्री तक दाईं ओर मुड़ेगा। वी.आर. रोबोट वर्ग की चारों भुजाएं बनाने के लिए इन क्रियाओं को चार बार दोहराएगा।
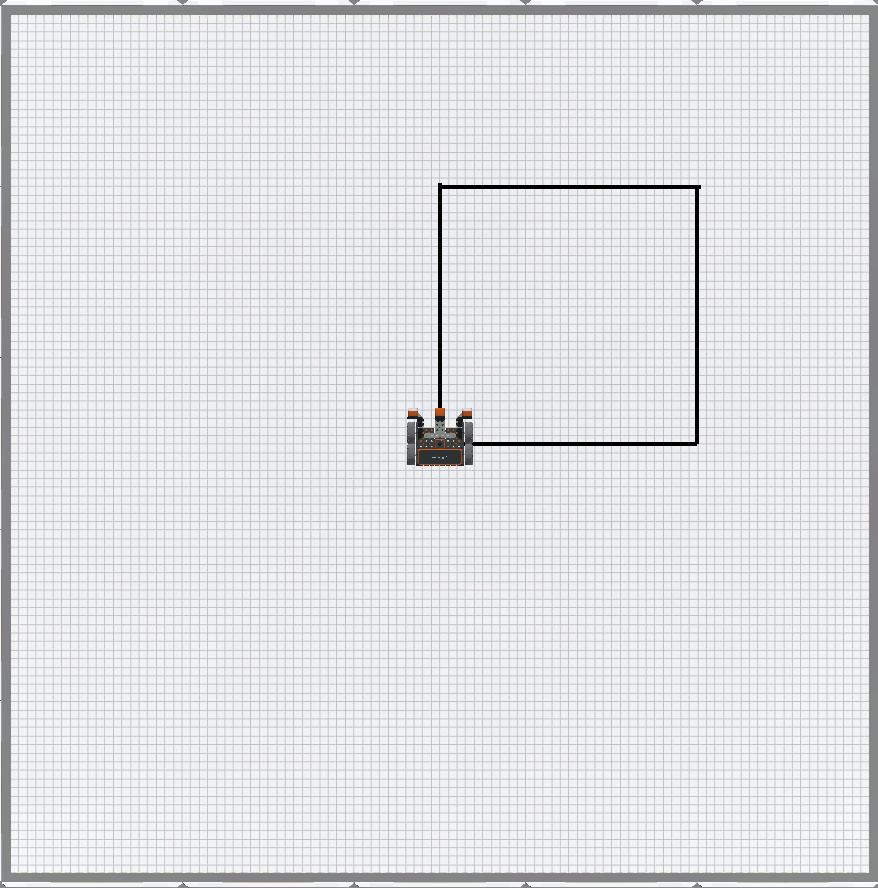
- खेल के मैदान को रीसेट करने और वीआर रोबोट को प्रारंभिक स्थिति में वापस ले जाने के लिए "रीसेट" बटन का चयन करें।
आपकी जानकारी के लिए
set_pen_color कमांड का उपयोग पेन के रंग बदलने के लिए किया जा सकता है। पेन को चार रंगों में से किसी एक में सेट किया जा सकता है: काला, नीला, हरा या लाल।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।