
![]() Mokytojo įrankių rinkinys
Mokytojo įrankių rinkinys
Šis puslapis informuos mokinius apie galimą žirklinių jungčių pranašumą varžybų robotams. Prieš skaitydami šį puslapį, paprašykite mokinių susimąstyti, kada būtų naudinga sukurti robotą su žirklinėmis jungtimis, ir užsirašykite šias idėjas į savo inžinerijos sąsiuvinius. Kai mokiniai užrašys savo idėjas, perskaitykite šį puslapį kaip visa klasė.
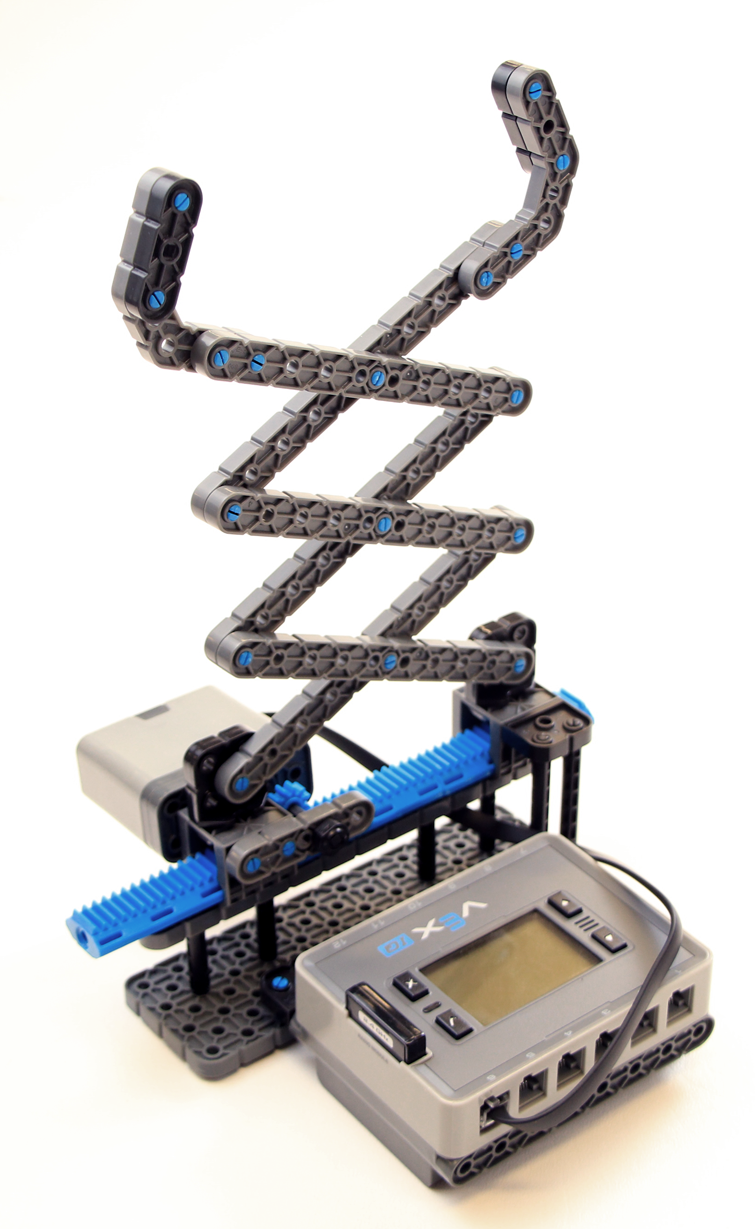
Paveikslėlyje pavaizduota VEX IQ konstrukcija yra vienas iš žirklinių jungčių naudojimo su varikliu keltuvui maitinti pavyzdžių. Kadangi jis yra nejudantis, šis pavyzdys nėra paruoštas konkurencijai, tačiau šis pavyzdys buvo pasirinktas siekiant pabrėžti variklio pridėjimą prie „Grabber“ tipo įrenginio. Naudokite Motyvuoti diskusiją, kad mokiniai susimąstytų apie kitus žirklinių jungčių pritaikymus jų robotams.
Projektavimas su žirklinėmis jungtimis
Savo dizaine galite naudoti žirklinę jungtį, kai reikia pakeisti savo roboto formą ir dydį, kad atliktumėte konkrečią užduotį. Žirklinės jungtys dažnai įtraukiamos į robotų dizainą su krumpliaračiais ir linijiniais slankiojančiais laikikliais, kad jų judėjimą būtų galima valdyti varikliu. Tai gali būti naudinga kuriant robotą varžyboms.
Žirklinė jungtis yra naudinga daugelyje robotų programų.
-
Norėdami padidinti roboto aukštį, galima naudoti žirklinę jungtį.
-
Jei jūsų robotas turi būti kompaktiškas, bet išsitiesti horizontaliai, galite naudoti žirklinę jungtį, kad padidintumėte jo plotį.
-
Žirklinė jungtis gali išplėsti roboto pasiekiamumą, jei robotui reikia paimti objektus ir padėti juos į skirtingas vietas.
![]() Motyvuoti diskusiją
Motyvuoti diskusiją
Kl.: Kaip manote, ką daro nuotraukoje esanti motorizuota žirklinė jungtis?
A: Tikėtina, kad jis sugriebia arba suspaudžia kažką, kaip tai daro Grabber, bet yra varomas varikliu.
Q: Ar manote, kad toks robotas gali laimėti konkursą?
A: Tai priklauso nuo žaidimo, bet paprastai šis robotas negali važiuoti ar daryti nieko kito, išskyrus gnybti. Taigi, mažai tikėtina, kad surinksime daug taškų.
Kl.: Be važiuoklės su pavara, ką dar galima pridėti prie šio žirklinio keltuvo, kad robotas būtų labiau pasirengęs varžyboms?
A: Tikėtina, kad atsakymai skirsis, bet vienas geriausių atsakymų yra tai, kad lifto viršuje gali būti įrengta platforma. Tai leistų prireikus perkelti žaidimo objektus ar kitas roboto dalis aukštyn ir žemyn. Kiti atsakymai gali apimti geresnius galus, skirtus sugnybti ir laikyti, arba geresnį pagrindą, kuris leistų žirklinėms jungtims sugriebti, laikyti ir perkelti objektą.
K: Kaip naudotumėte žirklinę jungtį varžybų robote?
A: Atsakymai greičiausiai pasisems įkvėpimo iš trijų šiame puslapyje išvardytų programų, ir tai yra skirta. Paprašykite mokinių pridėti savo informaciją apie tai, kaip veiktų jungtis ir kaip tai būtų naudinga roboto konstrukcijai.
![]() Išplėskite savo mokymąsi
Išplėskite savo mokymąsi
Norėdami išplėsti šią veiklą, pagalvokite, kokio tipo žaidimo elementus būtų lengviausia ir sunkiausiai paimti ir perkelti naudojant žirklinę jungtį. Norėdami pamatyti keletą faktinių varžybų žaidimo elementų pavyzdžių, apsilankykite VEX svetainėje, kad pamatytumėte dabartinius žaidimo elementus ir ankstesnius žaidimo elementus.
Norėdami susieti šią veiklą su robotikos varžybomis, paprašykite mokinių prisijungti prie robotikos varžybų komandos. Daugiau informacijos apie šių metų konkursą rasite Robotics Education & Competition Foundation (REC) svetainėje. „VIQC Hub“ programą taip pat galima atsisiųsti ir ji yra ideali varžybų kompanionas komandoms, žiūrovams ir renginių planuotojams, dalyvaujantiems „VEX Robotics Competition“! Daugiau informacijos apie programą ir atsisiųskite čia.
![]() Motyvuoti diskusiją
-
Išvada
Motyvuoti diskusiją
-
Išvada
Užbaikite šią dalį įtraukdami mokinius į visos klasės diskusiją. Paprašykite mokinių pasidalyti mintimis apie varžybų robotų žirklinių jungčių vertę ir apibendrinti, ką jie išmoko iš šio skyriaus. Skatinkite mokinius pasidalinti savo pastabomis iš savo inžinerinių sąsiuvinių.