
![]() Skolotāja rīklodziņš
Skolotāja rīklodziņš
-
Aktivitātes izklāsts
Šajā izpētē skolēni vispirms tiks iepazīstināti ar braukšanas ātruma iestatīšanu un pēc tam lūgs viņiem izpētīt, kā robota ātrums ietekmē tā impulsu. Noklikšķiniet šeit (Google / .docx / .pdf), lai skatītu šīs aktivitātes izklāstu. Izpratne par robota impulsu būs svarīgs jēdziens, kas jāpiemēro Strike Challenge boulinga spēlē. -
Ko skolēni ieprogrammēs
Izmantojot Speedbot (2-motoru, bez žiroskopa) veidnes projektu, skolēni var mainīt Speedbot ātruma iestatījumus, vienkārši pievienojot driveFor instrukciju setDriveVelocity (50, procenti) (1 , collas) instrukcija. Nodarbības vadītajā daļā skolēni pārvieto Speedbot ar dažādiem ātrumiem, un aktivitātes beigās viņiem tiek lūgts pielietot savas ātruma programmēšanas prasmes impulsa un enerģijas pārneses testos.
Speedbot ir gatavs braukt ar dažādiem ātrumiem!
Šī izmeklēšana palīdzēs jums uzzināt vairāk par Speedbot programmēšanu, lai tā brauktu ar ātrumu, kas ir vispiemērotākais uzdevumam. Strike Challenge beigās jums būs jāatrod ātrums Speedbot, kas ļauj tam būt ātram un ar lielu impulsu, bet saglabāt kontroli, lai trāpītu bumbu labā leņķī un ar lielu spēku.
![]() Skolotāja rīklodziņš
Skolotāja rīklodziņš
Šeit ir pārskats par VEXcode V5 lietotāja interfeisu. Studenti tiks iepazīstināti ar šīm cilnēm/pogām šīs Momentum Alley STEM laboratorijas aktivitāšu laikā. Visā STEM laboratorijā ir pieejamas arī saites, lai sniegtu plašāku informāciju par šīm cilnēm/pogām.
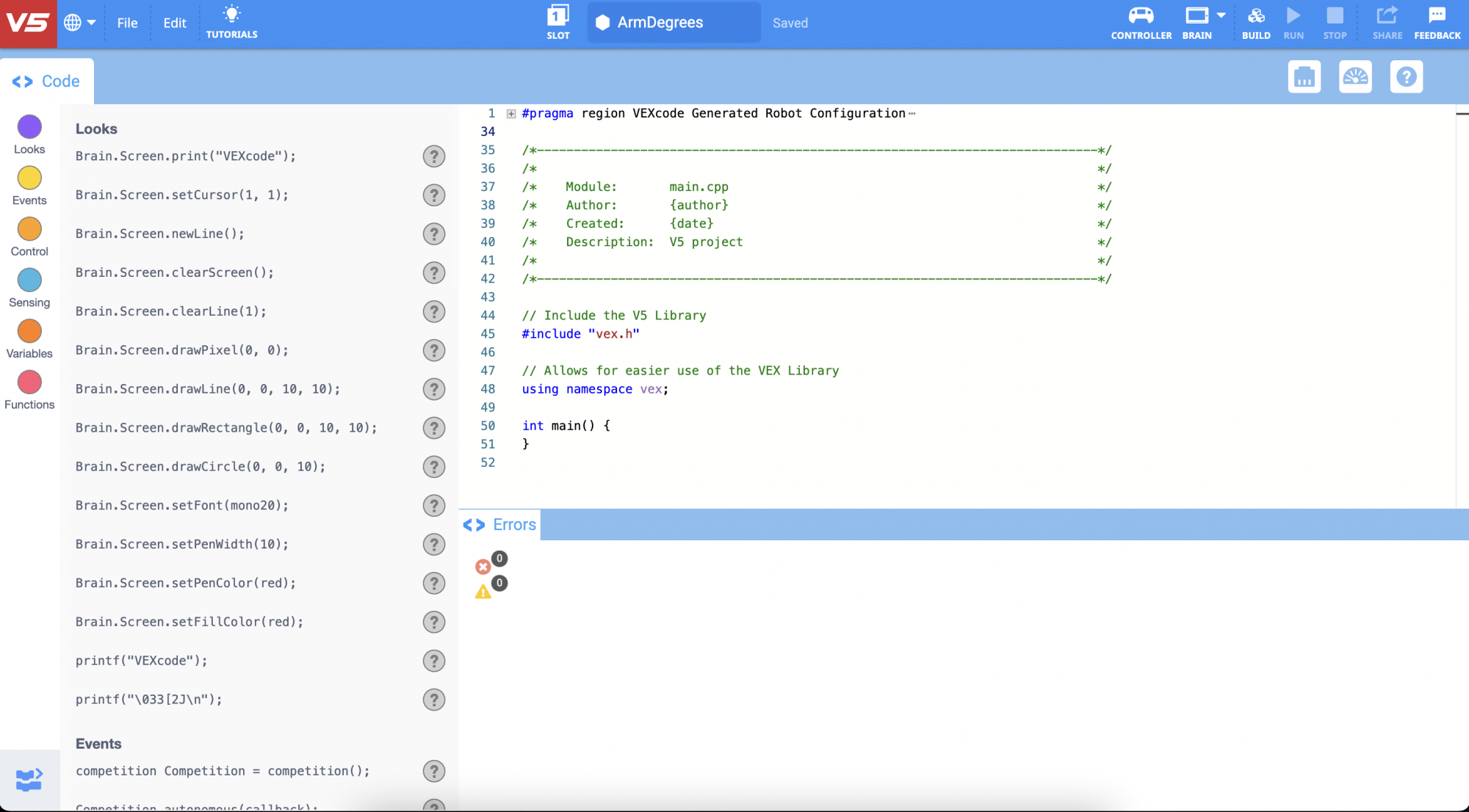
VEXcode V5 instrukcijas, kas tiks izmantotas šīs izmeklēšanas pirmajā daļā:
-
Drivetrain.setDriveVelocity(50, procenti);
-
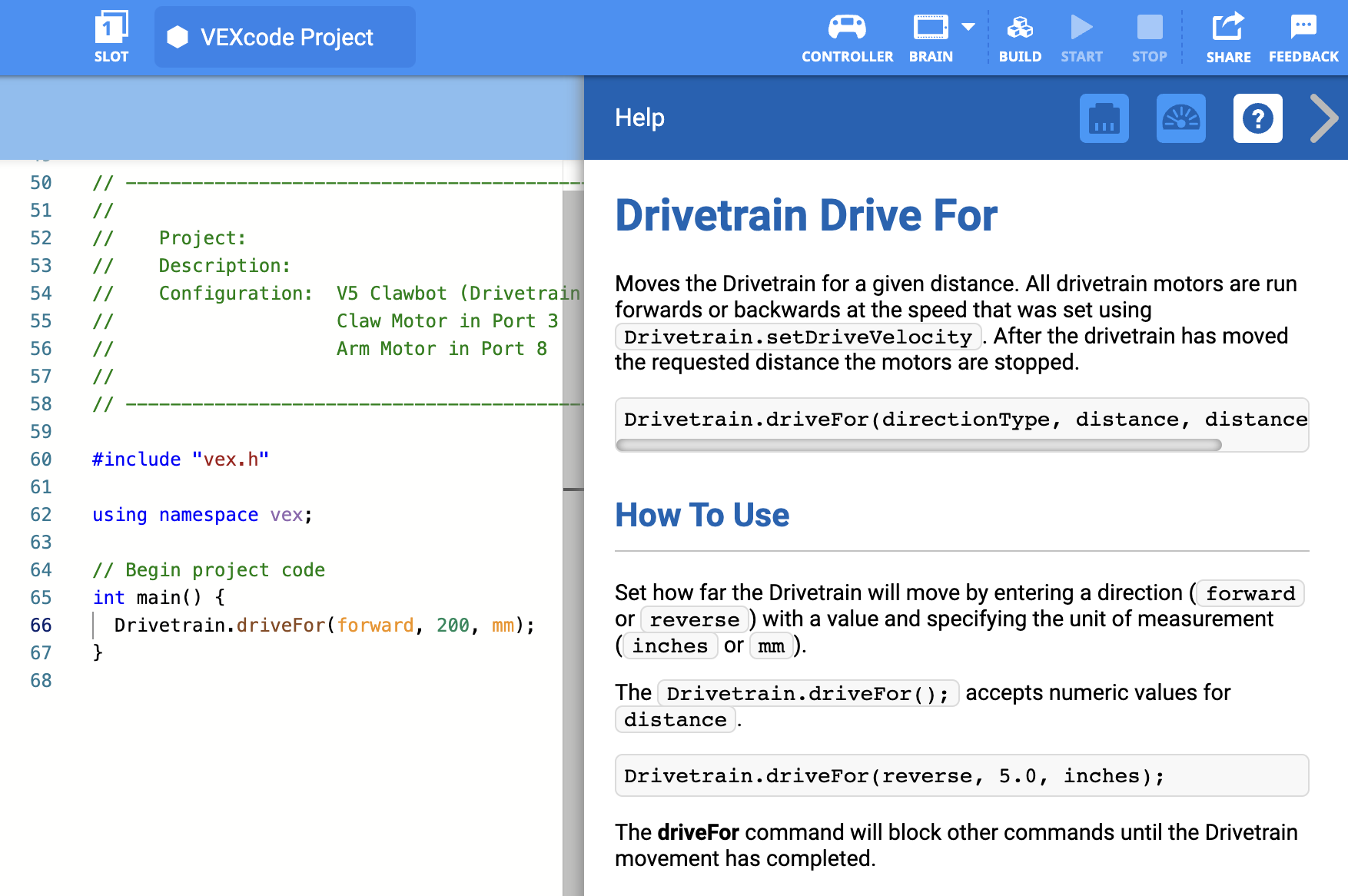
Drivetrain.driveFor(uz priekšu, 200, mm);
-
Lai uzzinātu vairāk par instrukciju, atlasiet Palīdzība un pēc tam atlasiet jautājuma zīmes ikonu blakus komandai, lai skatītu plašāku informāciju.
Pārliecinieties, vai jums ir vajadzīgā aparatūra, inženierijas piezīmjdators un VEXcode V5 lejupielādēts un gatavs.
![]() Skolotāju padomi
Skolotāju padomi
Ja šī ir pirmā reize, kad students izmanto VEXcode V5, viņš jebkurā laikā šīs izpētes laikā var atsaukties uz apmācībām. Pamācības atrodas rīkjoslā.

Katrai studentu grupai jāiegūst nepieciešamā aparatūra un grupas inženiertehniskā piezīmju grāmatiņa. Pēc tam atveriet VEXcode V5.
| Daudzums | Nepieciešamie materiāli |
|---|---|
| 1 |
Speedbot robots |
| 1 |
Uzlādēts robota akumulators |
| 1 |
VEXcode V5 |
| 1 |
USB kabelis (ja izmantojat datoru) |
| 1 |
Inženierzinātņu piezīmju grāmatiņa |
| 1 |
Bumba (futbola bumbas izmērs un forma) |
| 1 |
3m x 3m brīvā telpa |
| 1 |
Skaitītāja nūja vai lineāls |
| 1 |
Lentes rullis |
| 1 |
![]() Skolotāju padomi
Skolotāju padomi
Modelējiet katru problēmu novēršanas darbību skolēniem.
1. darbība: Sagatavošanās izpētei
Vai pirms aktivitātes sākšanas jums ir gatavs katrs no šiem priekšmetiem?
-
Vai visi motori ir pievienoti pareizajiem portiem?
-
Vai viedie kabeļi ir pilnībā ievietoti visos motoros?
-
Vai Brain ir ieslēgts?
-
Vai akumulators ir uzlādēts?
2. darbība: sāciet jaunu projektu
Lai sāktu projektu, veiciet šādas darbības:
-
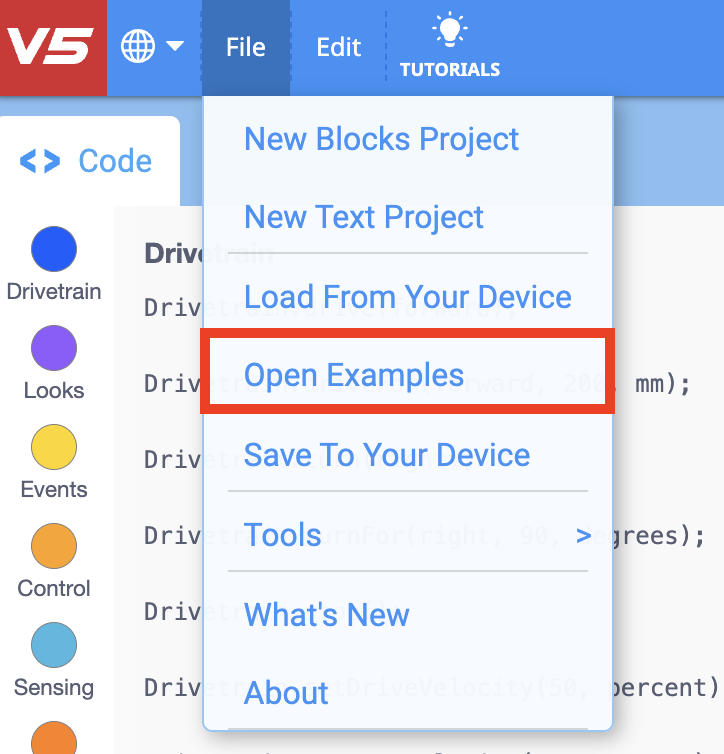
Atveriet izvēlni Fails un atlasiet Atvērt piemērus.
-
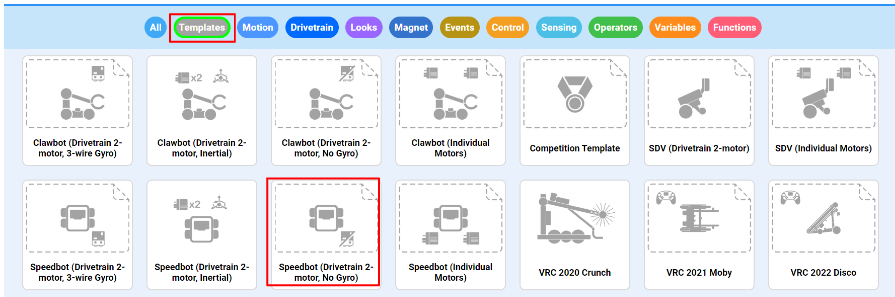
Atlasiet un atveriet veidnes projektu Speedbot (Drivetrain 2-motor, No Gyro). Veidnes projektā ir iekļauta Speedbot motora konfigurācija. Ja veidne netiek izmantota, jūsu robots projektu nedarbos pareizi.
-
Tā kā jūs strādāsit pie ātruma izpētes, jūs nosauksit savu projektu DriveVelocity. Kad esat pabeidzis, atlasiet Saglabāt.
![]() Skolotāju padomi
Skolotāju padomi
-
Projektu nosaukumos var būt atstarpes starp vai aiz vārdiem.

-
Varat lūgt studentiem projekta nosaukumam pievienot savus iniciāļus vai savas grupas nosaukumu. Tas palīdzēs atšķirt projektus, ja lūgsit studentus tos iesniegt.
-
Tā kā šī ir pirmā darbība ar programmēšanu, ko jūsu skolēni var mēģināt veikt, jums vajadzētu modelēt soļus un pēc tam lūgt studentiem veikt tās pašas darbības. Pēc tam skolotājam jāuzrauga skolēni, lai pārliecinātos, ka viņi pareizi izpilda darbības.
-
Pārliecinieties, vai skolēni izvēlnē Fails ir atlasījuši Atvērt piemērus.
-
Pārliecinieties, vai skolēni ir izvēlējušies Speedbot (Drivetrain 2-motor, No Gyro) veidnes projektu.
-
Varat norādīt skolēniem, ka lapā Piemēri ir vairākas izvēles iespējas. Veidojot un izmantojot citus robotus, viņiem būs iespēja izmantot dažādas veidnes.
-
Pārbaudiet, vai projekta nosaukums DriveVelocity tagad ir logā rīkjoslas centrā.
![]() Skolotāju rīkkopa
Projektu
Skolotāju rīkkopa
Projektu
-
Norādiet, ka, pirmo reizi atverot VEXcode V5, logs tika apzīmēts ar nosaukumu VEXcode Project. VEXcode Project ir noklusējuma projekta nosaukums, pirmo reizi atverot VEXcode V5. Kad projekts tika pārdēvēts par disku un saglabāts, displejs tika atjaunināts, lai parādītu jauno projekta nosaukumu. Izmantojot šo logu rīkjoslā, ir viegli pārbaudīt, vai skolēni izmanto pareizo projektu.
-
Pastāstiet studentiem, ka viņi tagad ir gatavi sākt savu pirmo projektu. Paskaidrojiet skolēniem, ka, veicot tikai dažas vienkāršas darbības, viņi varēs izveidot un vadīt projektu, kas virzīs Speedbot uz priekšu.
-
Atgādiniet studentiem darba laikā saglabāt savus projektus. Sadaļā C++ no VEX bibliotēkas ir izskaidrota saglabāšanas prakse VEXcode V5.
![]() Skolotāja rīkkopa
-
Apstāties un apspriest
Skolotāja rīkkopa
-
Apstāties un apspriest
Tas ir labs punkts, lai apturētu un likt studentiem pārskatīt soļus, kas tikko tika pabeigti, uzsākot jaunu projektu VEXcode V5 individuāli vai grupās. Palūdziet studentiem pārdomāt individuāli, pirms dalās savā grupā vai visai klasei.
3. darbība: brauciet uz priekšu 150 mm dažādos ātrumos
Tagad jūs esat gatavs sākt programmēt robotu, lai tas brauktu uz priekšu dažādos ātrumos!
-
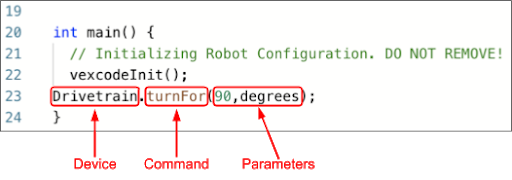
Pirms sākam programmēt, mums ir jāsaprot, kas ir instrukcija. Instrukcijai ir trīs daļas.
![]() Skolotāju padomi
Skolotāju padomi
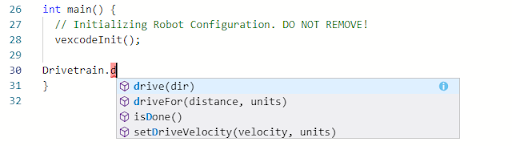
Sākot rakstīt instrukciju, iespējams, pamanīsit automātiskās pabeigšanas funkciju. Izmantojiet taustiņus “Uz augšu” un “Uz leju”, lai atlasītu vajadzīgo nosaukumu, pēc tam nospiediet tastatūras taustiņu “Tab” vai (Enter/Return), lai veiktu atlasi. Papildinformāciju par šo funkciju skatiet rakstā C++ .
-
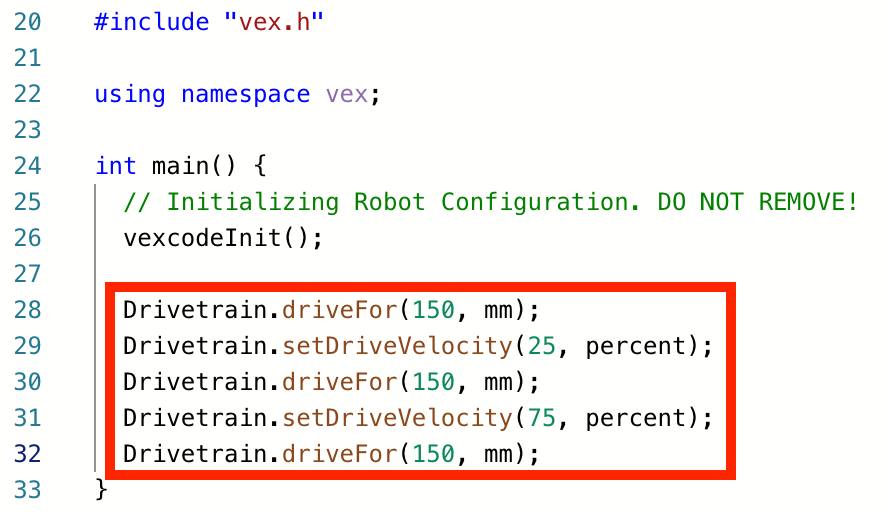
Pievienojiet projektam instrukcijas:
![]() Skolotāju padomi
Skolotāju padomi
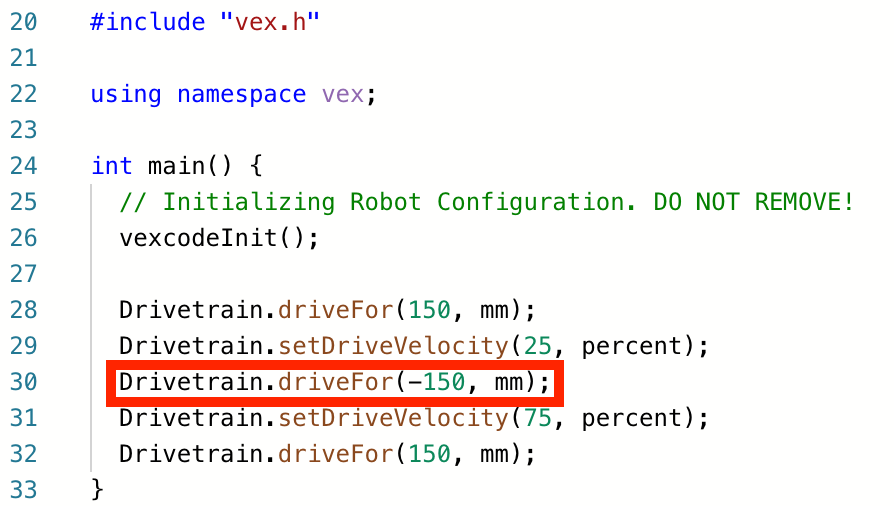
Ņemiet vērā, ka otrajā un trešajā instrukcijā (29. un 30. rinda) ir tādas pašas kā ceturtajā un piektajā instrukcijā (31. un 32. rindiņā), bet ar atšķirīgu ātruma parametru. Pēc trešās instrukcijas pievienošanas skolēni var izcelt 29. un 30. rindiņu, lai kopētu un ielīmētu rindiņas zem, veidojot 31. un 32. rindiņu. Pēc tam viņi var mainīt ātrumu 31. līnijā līdz 75 procentiem.
-
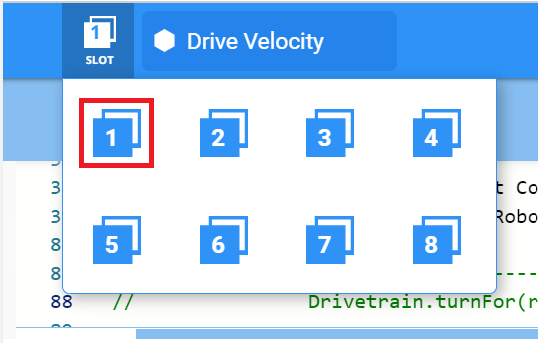
Atlasiet ikonu Slot, lai izvēlētos vienu no astoņiem pieejamajiem Robot Brain slotiem, un atlasiet slotu 1.
-
Savienojiet V5 Robot Brain ar datoru, izmantojot mikro USB kabeli, un ieslēdziet V5 Robot Brain. Smadzeņu ikona rīkjoslā kļūst zaļa , tiklīdz ir izveidots veiksmīgs savienojums.

-
Atlasiet Lejupielādēt , lai lejupielādētu projektu programmā Brain.

![]() Skolotāja rīklodziņš
Skolotāja rīklodziņš
-
Atgādiniet studentiem atvienot USB kabeli no robota smadzenēm. Ja robots ir pieslēgts datoram projekta izpildes laikā, robots var aizvilkt savienojuma kabeli.
-
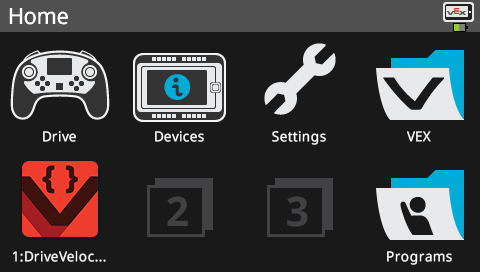
Pārbaudiet, vai jūsu projektā nav lejupielādēts ( C++) apskatot robota smadzeņu ekrānu. Projekta nosaukumam DriveVelocity jābūt norādītam 1. slotā.
![]() Skolotāja rīklodziņš
Skolotāja rīklodziņš
-
Apstāties un apspriest
Palūdziet studentiem paredzēt, kas, viņuprāt, notiks, kad šis projekts tiks lejupielādēts un palaists ar Speedbot robotu. Pastāstiet studentiem ierakstīt savas prognozes savās inženierzinātņu piezīmju grāmatiņās. Ja laiks atļauj, palūdziet katrai grupai dalīties savās prognozēs.Studentiem jāparedz, ka Speedbot vispirms virzīsies uz priekšu ar noklusējuma ātrumu (50%), pēc tam lēnāk (25%) nekā noklusējuma ātrums un pēc tam ātrāk (75%) par noklusējuma ātrumu.
-
Vispirms modelis
Modelējiet projektu klases priekšā, pirms visi skolēni mēģina vienlaikus. Sapulciniet skolēnus vienā zonā un atstājiet pietiekami daudz vietas Speedbot kustībai, ja tas ir novietots uz grīdas.Pastāstiet studentiem, ka tagad ir viņu kārta vadīt savu projektu. Pārliecinieties, vai tiem ir brīvs ceļš un neviens Speedbots nesaskaras.
-
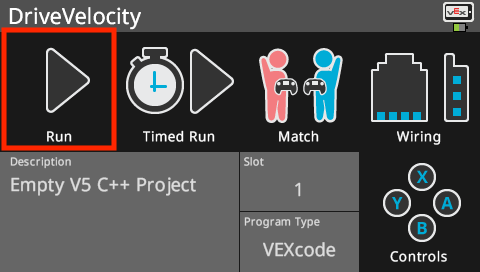
Palaidiet (C++) projektu robotā, pārliecinoties, ka projekts ir atlasīts, un pēc tam nospiediet pogu Run uz robota smadzeņu. Apsveicam ar pirmā projekta izveidi!
4. darbība: Brauciet uz priekšu un atpakaļ 150 mm dažādos ātrumos
Tagad, kad esat ieprogrammējis savu robotu braukt uz priekšu ar dažādiem ātrumiem, ieprogrammējiet to tā, lai tas tagad brauktu uz priekšu un atpakaļ ar dažādiem ātrumiem.
-
Mainiet parametru otrajā piedziņā instrukcijai, lai parādītu -150.
-
Atlasiet projekta nosaukumu, lai mainītu to no DriveVelocity uz ReverseVelocity.

-
Atlasiet slota ikonu, lai izvēlētos jaunu slotu. Izvēlieties 2. slotu.
-
Lejupielādēt (C++) projektu.

-
Pārbaudiet, vai jūsu projektā nav lejupielādēts ( C++) apskatot robota smadzeņu ekrānu. Projekta nosaukumam ReverseVelocity jābūt norādītam 2. slotā.
-
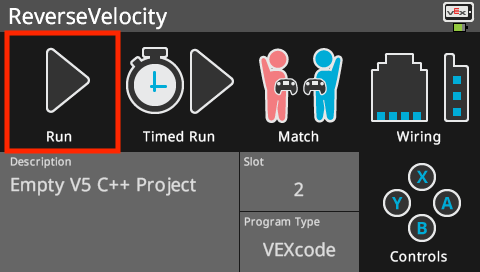
Palaidiet (C++) projektu robotā, pārliecinoties, ka projekts ir atlasīts, un pēc tam nospiediet pogu Run uz robota smadzeņu.
![]() Skolotāja rīkkopa
darbības pabeigšana
Skolotāja rīkkopa
darbības pabeigšana
-
Lai mainītu komandu driveFor no uz priekšu uz reverse, vienkārši mainiet pirmo parametru uz -150. Tādējādi piedziņas motori pārvietosies pretējā virzienā.
-
mm skaitu var mainīt, bet šajā piemērā mēs tos atstāsim uz 150 mm, kā iestatīts iepriekšējā darbībā.
-
Atgādiniet studentiem pirms projekta palaišanas atvienot USB kabeli no Robot Brain.
-
Atgādiniet studentiem darba laikā saglabāt savus projektus. VEX bibliotēkā ir sadaļa C++ , kurā ir izskaidrota saglabāšanas prakse VEXcode V5.
![]() Skolotāju padomi
Skolotāju padomi
Ja nepieciešams, palūdziet komandām dalīties ar testēšanas laukumu un bumbu, taču var izveidot arī vairākus testēšanas laukumus, katrs ar savu bumbu. Izlemiet, vai vēlaties iestatīt testēšanas apgabalu(-s), vai arī vēlaties, lai studenti to dara.
5. darbība. Pārbaudes zonas iestatīšana

Testēšanas zonas izkārtojuma piemērs
-
Izmantojiet lenti un skaitītāju, lai uz grīdas izveidotu 3 m līniju, piemēram, horizontālo līniju, kas parādīta attēlā.
-
Kad līnija ir izveidota, vēlreiz izmantojiet lenti un skaitītāja sviru, lai izveidotu 1 m līnijas pāri 3 m līnijai, piemēram, vertikālās līnijas attēlā iepriekš. Pie katras 50 cm atzīmes uz vertikālās līnijas uzlīmējiet 1 m līniju, sākot no 0 cm.
-
Īsākās horizontālās līnijas jācentrē uz garākās vertikālās līnijas.
-
-
Kamēr apgabals tiek izveidots, vienam vai diviem jūsu komandas locekļiem ir jāizveido jauns projekts ar nosaukumu Momentum. Iestatiet ātrumu uz 50% un lieciet Speedbot braukt uz priekšu līdz pirmajai līnijai 50 cm. Paturiet prātā 1 cm = 10 mm, lai robots virzīsies uz priekšu 50 cm vai 500 milimetrus.
![]() Skolotāja rīkkopa
-
Kāpēc šī aktivitāte?
Skolotāja rīkkopa
-
Kāpēc šī aktivitāte?
-
Datu vākšana un analīze, pat vienkārša modeļu atpazīšana, ir fundamentālas zinātnes prasmes. Šī darbība pievieno struktūru šai datu analīzei, novēršot bieži sastopamas kļūdas.
-
Ņemiet vērā, ka instrukcijās studentiem nav likts mainīt robota braukšanas attālumu, kā arī mainīt robota ātrumu. Tas ir apzināts pielietojums tam, ko mācīšanās zinātnieki sauc par mainīgo lielumu kontroles stratēģiju. Ir svarīgi iemācīt iesācējiem izmeklētājiem vienlaikus manipulēt ar vienu mainīgo (ti, šajā gadījumā ar ātrumu), lai noteiktu tā ietekmi uz otru mainīgo (ti, attālumu, ko bumbiņa veic pēc sadursmes), jo tā ne vienmēr ir pieeja studentiem. spontāni, izmantojot minēšanas un pārbaudes pieeju. Tipiskas minēšanas un pārbaudes pieejas bieži vienlaikus manipulē ar vairāk nekā vienu mainīgo (ti, mainot gan ātrumu, gan robota nobraukto attālumu) un novērojot saplūšanas ietekmi uz attālumu, ko bumbiņa pārvietojas pēc rotācijas. Šī aktivitāte mēģina novirzīt studentus no tā, jo attiecības starp mainīgajiem lielumiem ir neskaidras. Vai tas ir lielāks robota ātrums, lielāks attālums, ko robots nobrauc, vai abi, kas liek bumbiņai virzīties tālāk? Mēs nevaram uz to atbildēt, ja vienlaikus manipulējam ar abiem mainīgajiem.
-
Tomēr komandas var spontāni mēģināt vadīt robotu dažādos attālumos. Ja to ievērojat, palūdziet viņiem mainīt tikai attālumu, bet saglabāt ātrumu tādu pašu, kāds tas bija izmēģinājumā ar sākotnējo 500 mm attālumu. Tādā veidā viņi var salīdzināt vienu un to pašu ātrumu ar dažādiem braukšanas attālumiem, lai noskaidrotu, vai robota braukšanas attālums ietekmē arī bumbiņas attālumu.
6. darbība. Enerģijas pārnešanas pārbaude sadursmju laikā

Boulinga izaicinājuma testa laukums ar robotu un bumbu
Centrējiet bumbu uz horizontālās līnijas 50 cm attālumā un novietojiet savu robotu tā, lai tā priekšpuse būtu centrēta uz horizontālās līnijas 0 cm attālumā. Pārliecinieties, ka robota priekšpuse ir vērsta bumbiņas virzienā. Palaidiet savu pirmo Momentum projektu, kura ātrums ir iestatīts uz 50%, un pievērsiet īpašu uzmanību, kad robots saduras ar bumbu.
Šajā datu tabulā ierakstiet iestatīto ātrumu, nobraukto attālumu un bumbiņas nobraukto attālumu (Google / .pdf). Tabulas pirmā rinda ir sākta, pamatojoties uz Momentum projektu, pie kura strādājāt iepriekšējā solī. Mēģinot iestatīt dažādus ātrumus, turpiniet pievienot datus šai tabulai. Pēc tam varat pievienot citu komandu datus, apspriežot savus atklājumus kā klasei.
![]() Skolotāju padomi
Skolotāju padomi
-
Sagatavojiet laukumu, lai bumbiņa varētu atsist dažādos virzienos dažādos attālumos. Ja nepieciešams, aizveriet durvis un/vai logus.
-
Ātruma izpētes tabulu var saglabāt no apakšas, vai arī skolēni var atkārtoti izveidot tabulu savās inženierzinātņu piezīmju grāmatiņās.
-
Grupas inženieru piezīmju grāmatiņu novērtēšanas rubriku var atrast šeit (Google / .docx / .pdf), un rubriku atsevišķu piezīmju grāmatiņu novērtēšanai var atrast šeit (Google / .docx / . pdf). Ikreiz, kad plānojat novērtēt studentu darbu ar rubriku(-ām), noteikti dalieties ar rubriku, pirms viņi sāk strādāt pie projekta.

Vācot datus, padomājiet par tālāk norādītajiem jautājumiem un atbildiet uz tiem savā inženierzinātņu piezīmju grāmatiņā.
-
Kā jūs varat pateikt, ka sadursmes laikā robota impulss pārnesa enerģiju uz bumbu? Paskaidrojiet ar detaļām.
-
Atkārtojiet testu vēl vismaz divas reizes. Izmēģiniet ātrumu, kas mazāks par 50%. Atiestatiet bumbiņu tās pozīcijā un ierakstiet tabulā, cik tālu bumbiņa pārvietojas. Tāpat izmēģiniet ātrumu, kas lielāks par 50%. Atiestatiet bumbiņu tās pozīcijā un ierakstiet tabulā, cik tālu bumbiņa pārvietojas.
-
Kad visas grupas ir pabeigušas savus trīs testus, pārrunājiet ātrumus, ko izvēlējušās pārējās grupas, un to, cik tālu bumbiņa veica testus. Kad komandas dalās ar saviem datiem, pievienojiet savus rezultātus savai tabulai.
-
Meklējiet datos modeli(s). Vai lodes nobrauktais attālums palielinās vai samazinās, palielinoties iestatītajam ātrumam?
![]() Skolotāju rīkkopa
-
Atbildes
Skolotāju rīkkopa
-
Atbildes
-
Bumbiņas kustība ir pierādījums tam, ka robots sadursmes laikā pārnesa enerģiju. Kā pierādījumu skolēni var arī aprakstīt bumbiņas ātrumu pēc trieciena vai tās kustības virzienu.
-
Bumbiņas nobrauktais attālums ir atkarīgs no izmantotās bumbiņas masas/svara un robotam iestatītā ātruma.
-
Studentiem jāatzīst, ka lielāki ātrumi liek bumbiņai pārvietoties tālāk nekā ar mazāku ātrumu. Skaidri savienojiet to ar robota impulsu. Uzsveriet, ka robota svars nav mainījies, ir mainījies tikai tā ātrums, bet abi veicina robota impulsu. Pajautājiet viņiem, vai viņi domā, ka bumba aizceļotu tik tālu, ja robots būtu smagāks. Jādomā, ka tā būtu. Vairāk par bumbas masas ietekmi sadursmes laikā ir nākamajā lasījumā.
-
Studentu grupas varētu būt izvēlējušās ļoti mainīgus ātrumus, taču vispārējais mācību mērķis ir, lai skolēni apzinātos, ka lielāki ātrumi rada lielāku impulsu, kas sadursmes laikā nodod vairāk enerģijas uz bumbu.