
![]() Caixa de ferramentas do professor
Caixa de ferramentas do professor
-
Esboço da Atividade
Esta exploração apresentará primeiro aos alunos a definição da velocidade de condução e depois pedir-lhes-á que explorem como a velocidade do robô afeta o seu momento. Clique aqui (Google ) para ver o esboço desta atividade. Compreender o impulso do robô será um conceito importante a ser aplicado ao jogo de boliche Strike Challenge. -
O que os alunos irão programar
Usar o projeto modelo Speedbot (transmissão de 2 motores, sem giroscópio) permite que os alunos alterem as configurações de velocidade do Speedbot simplesmente adicionando uma instrução setDriveVelocity (50, por cento) ao driveFor (1 , polegadas) instrução. A parte guiada da atividade faz com que os alunos movam o Speedbot em diferentes velocidades e o final da atividade pede que apliquem suas habilidades de programação de velocidade em testes de momento e transferência de energia.
O Speedbot está pronto para dirigir em diferentes velocidades!
Esta investigação o ajudará a aprender mais sobre como programar o Speedbot para dirigir nas velocidades mais adequadas para a tarefa. No final do Strike Challenge, você precisará encontrar uma velocidade para o Speedbot que lhe permita ser rápido e ter grande impulso, mas permanecer no controle para acertar a bola em um bom ângulo e com muita força.
![]() Caixa de ferramentas do professor
Caixa de ferramentas do professor
Aqui está uma visão geral da interface do usuário do VEXcode V5. Os alunos serão apresentados a essas guias/botões durante as atividades neste Laboratório STEM do Momentum Alley. Links também são fornecidos em todo o Laboratório STEM para fornecer mais informações sobre essas guias/botões.
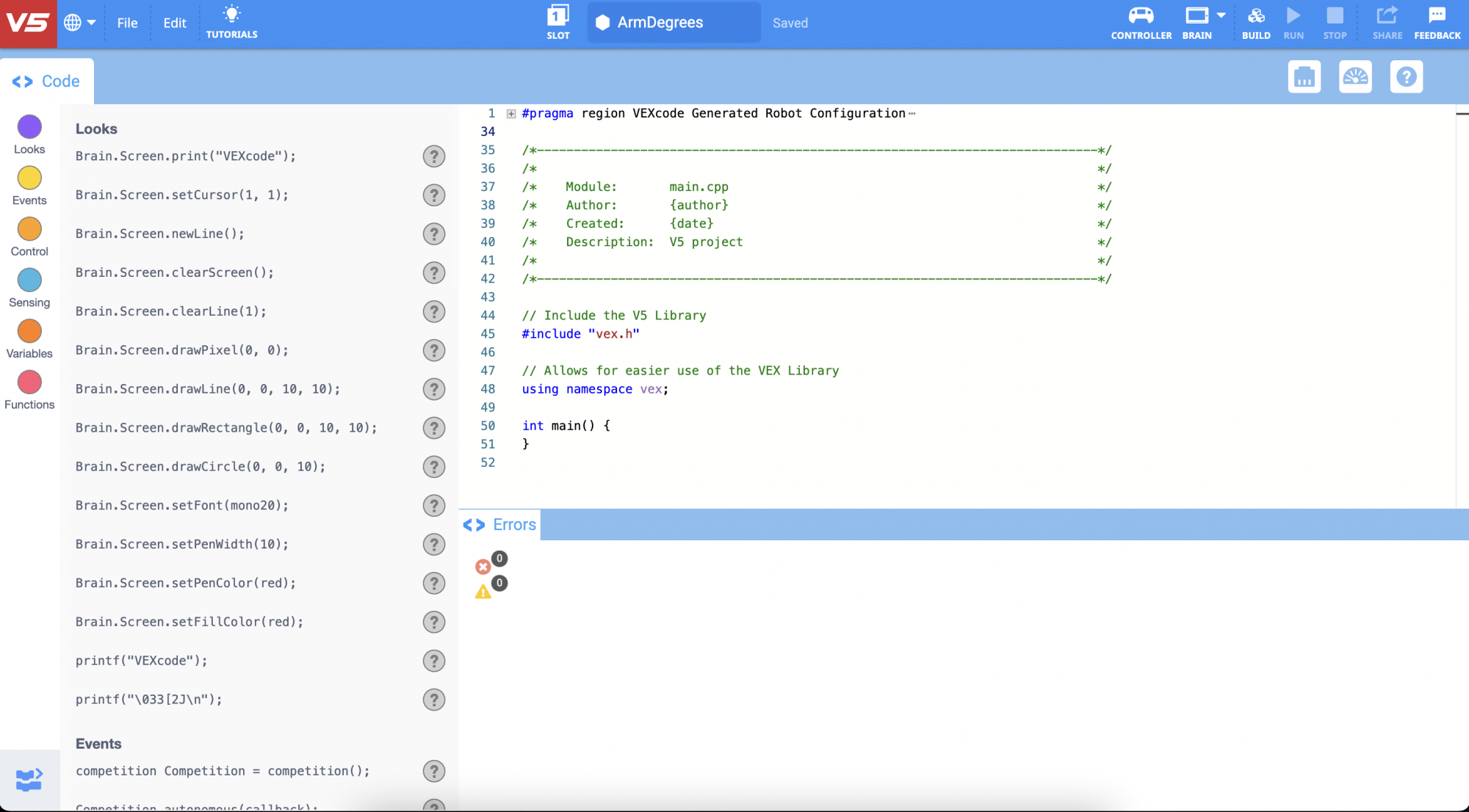
Instruções do VEXcode V5 que serão utilizadas na primeira parte desta investigação:
-
Drivetrain.setDriveVelocity(50, por cento);
-
Drivetrain.driveFor (para frente, 200, mm);
-
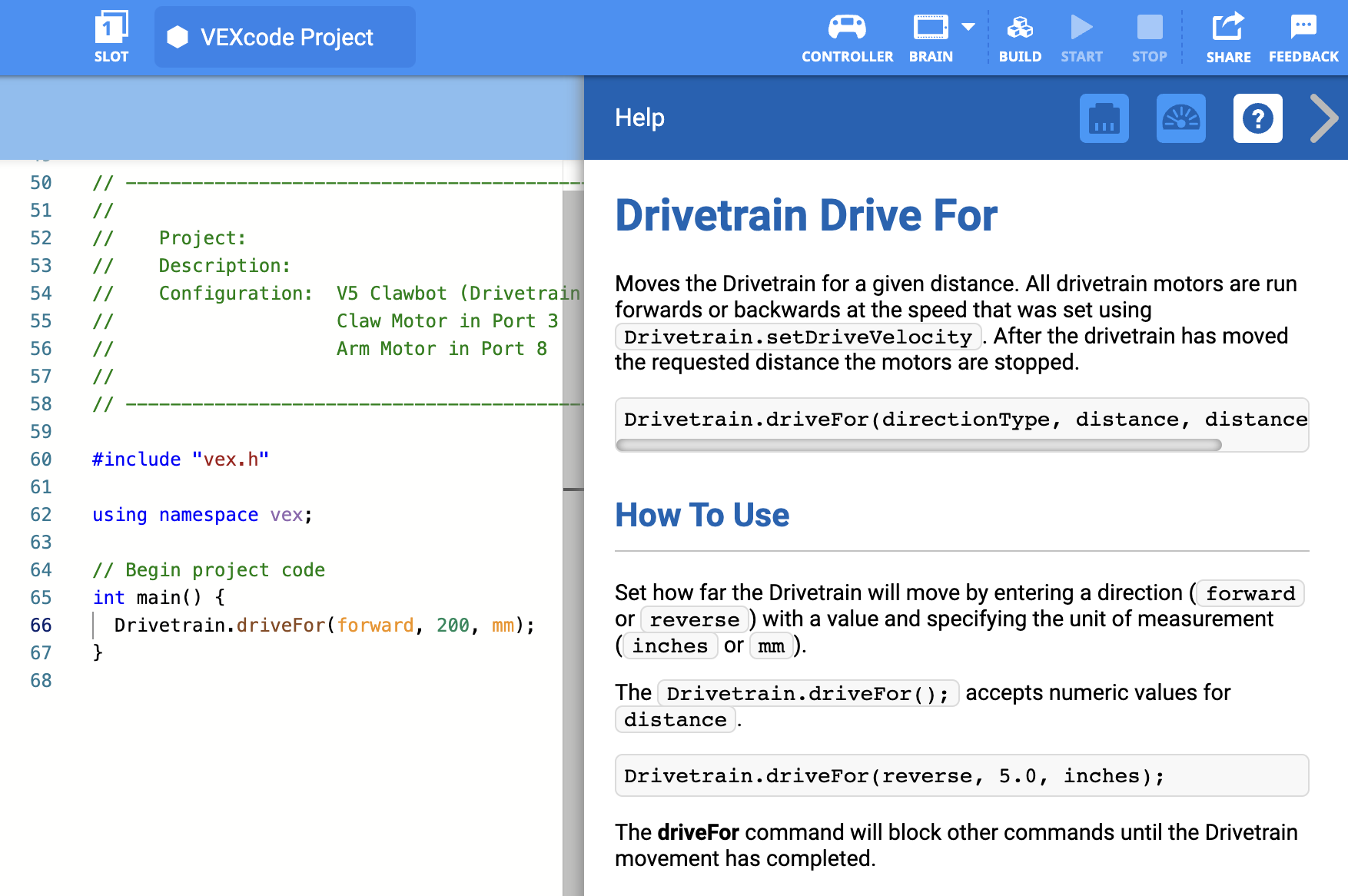
Para saber mais informações sobre as instruções, selecione Ajuda e selecione o ícone de ponto de interrogação ao lado de um comando para ver mais informações.
Certifique-se de ter o hardware necessário, seu notebook de engenharia e o VEXcode V5 baixado e pronto.
![]() Dicas para professores
Dicas para professores
Se esta for a primeira vez que o aluno usa o VEXcode V5, ele poderá consultar os Tutoriais a qualquer momento durante esta exploração. Os Tutoriais estão localizados na barra de ferramentas.

Cada grupo de alunos deverá obter o hardware necessário e o caderno de engenharia do grupo. Em seguida, abra o VEXcode V5.
| Quantidade | Materiais necessários |
|---|---|
| 1 |
Robô Speedbot |
| 1 |
Bateria carregada do robô |
| 1 |
VEX código V5 |
| 1 |
Cabo USB (se estiver usando um computador) |
| 1 |
Caderno de Engenharia |
| 1 |
Bola (do tamanho e formato de uma bola de futebol) |
| 1 |
Espaço livre de 3m x 3m |
| 1 |
Vara métrica ou régua |
| 1 |
Rolo de fita |
| 1 |
![]() Dicas para professores
Dicas para professores
Modele cada uma das etapas de solução de problemas para os alunos.
Etapa 1: Preparação para a Exploração
Antes de começar a atividade, você tem cada um desses itens prontos?
-
Os cabos inteligentes estão totalmente inseridos em todos os motores?
-
O Cérebro está ligado?
-
A bateria está carregada?
Etapa 2: iniciar um novo projeto
Conclua as seguintes etapas para iniciar o projeto:
-
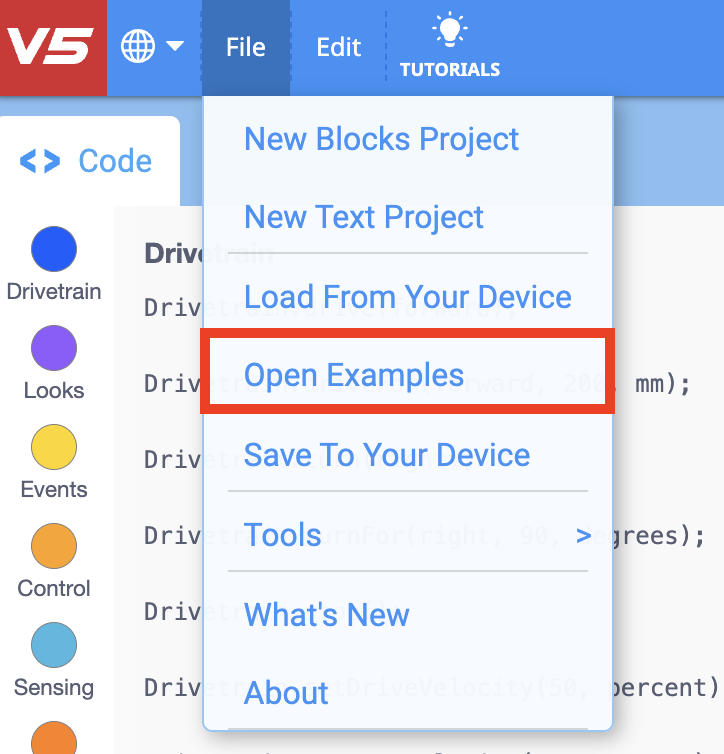
Abra o menu Arquivo e selecione Abrir exemplos.
-
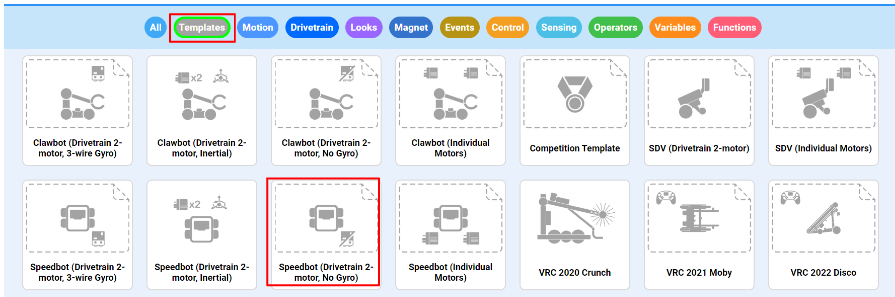
Selecione e abra o projeto modelo Speedbot (Drivetrain 2-motor, No Gyro). O projeto modelo contém a configuração do motor do Speedbot. Se o modelo não for usado, seu robô não executará o projeto corretamente.
-
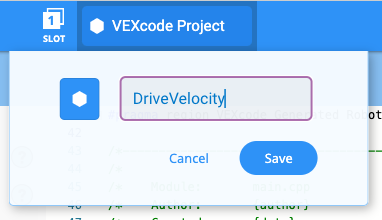
Como você trabalhará na exploração da velocidade, nomeará seu projeto DriveVelocity. Quando terminar, selecione Salvar.
![]() Dicas para professores
Dicas para professores
-
Os nomes dos projetos podem ter espaços entre ou após as palavras.

-
Você pode pedir aos alunos que adicionem suas iniciais ou o nome do grupo ao nome do projeto. Isso ajudará a diferenciar os projetos se você pedir aos alunos que os enviem.
-
Como esta é a primeira atividade de programação que seus alunos podem tentar, você deve modelar as etapas e depois pedir aos alunos que concluam as mesmas ações. O professor deve então monitorar os alunos para garantir que eles estão seguindo as etapas corretamente.
-
Certifique-se de que os alunos tenham selecionado Abrir Exemplos no menu Arquivo.
-
Certifique-se de que os alunos tenham selecionado o projeto modelo Speedbot (Drivetrain 2-motor, No Gyro).
-
Você pode mostrar aos alunos que há diversas opções para escolher na página de Exemplos. À medida que constroem e usam outros robôs, eles terão a oportunidade de usar modelos diferentes.
-
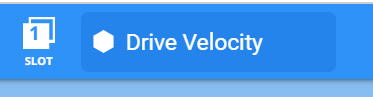
Verifique se o nome do projeto DriveVelocity está agora na janela no centro da barra de ferramentas.
![]() Caixa de ferramentas do professor
-
Salvando projetos
Caixa de ferramentas do professor
-
Salvando projetos
-
Saliente que quando eles abriram o VEXcode V5 pela primeira vez, a janela estava rotulada como VEXcode Project. Projeto VEXcode é o nome do projeto padrão quando o VEXcode V5 é aberto pela primeira vez. Depois que o projeto foi renomeado como Drive e salvo, a exibição foi atualizada para mostrar o novo nome do projeto. Utilizando esta janela da barra de ferramentas, é fácil verificar se os alunos estão utilizando o projeto correto.
-
Diga aos alunos que agora eles estão prontos para iniciar seu primeiro projeto. Explique aos alunos que, seguindo apenas alguns passos simples, eles serão capazes de criar e executar um projeto que fará avançar o Speedbot.
-
Lembre os alunos de salvar seus projetos enquanto trabalham. A seção C++ da Biblioteca VEX explica as práticas de salvamento no VEXcode V5.
![]() Caixa de ferramentas do professor
-
Pare e discuta
Caixa de ferramentas do professor
-
Pare e discuta
Este é um bom ponto para fazer uma pausa e fazer com que os alunos revisem as etapas que acabaram de ser concluídas ao iniciar um novo projeto no VEXcode V5 individualmente ou em grupos. Peça aos alunos que reflitam individualmente antes de compartilhar com o grupo ou com toda a turma.
Etapa 3: Avançar 150 mm em velocidades diferentes
Agora você está pronto para começar a programar o robô para avançar em velocidades diferentes!
-
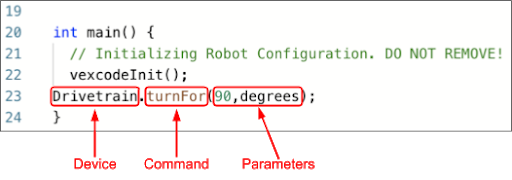
Antes de começarmos a programar, precisamos entender o que é uma instrução. Existem três partes em uma instrução.
![]() Dicas para professores
Dicas para professores
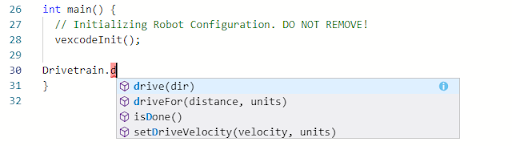
Você pode notar uma função de preenchimento automático ao começar a digitar a instrução. Use as teclas “Para cima” e “Para baixo” para selecionar o nome desejado e pressione “Tab” ou (Enter/Return) no teclado para fazer a seleção. Para obter mais informações sobre esse recurso, consulte o artigo C++ .
-
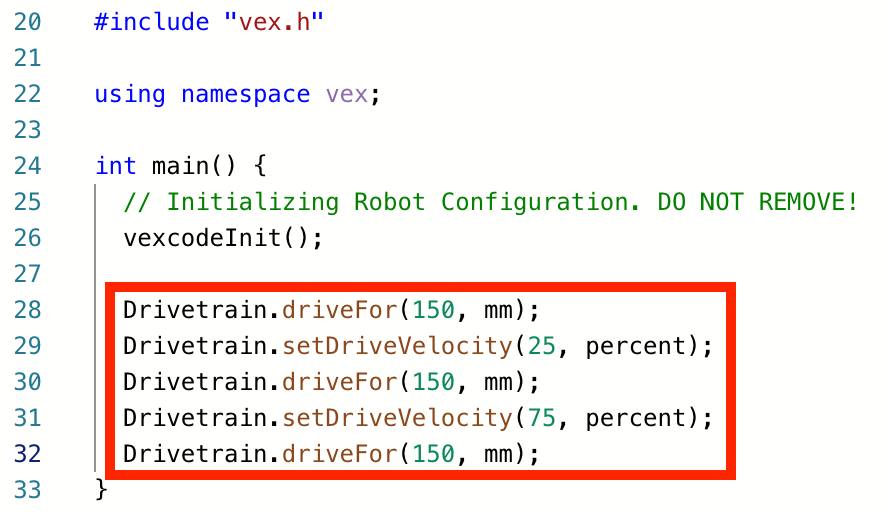
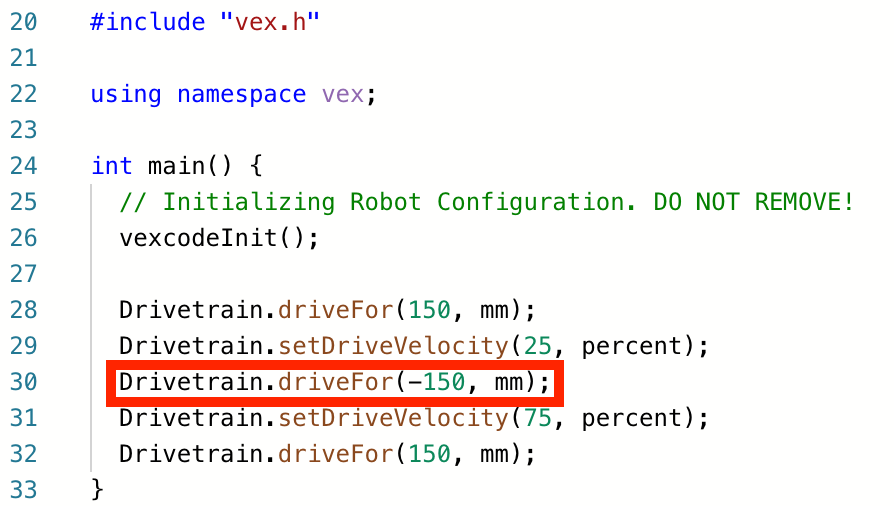
Adicione as instruções ao projeto:
![]() Dicas para professores
Dicas para professores
Observe que a segunda e a terceira instruções (Linhas 29 e 30) são iguais às quarta e quinta instruções (Linhas 31 e 32), mas com um parâmetro de velocidade diferente. Após adicionar a terceira instrução, os alunos podem destacar as Linhas 29 e 30 para copiar e colar as linhas abaixo formando as Linhas 31 e 32. Eles podem então alterar a velocidade na Linha 31 para 75 por cento.
-
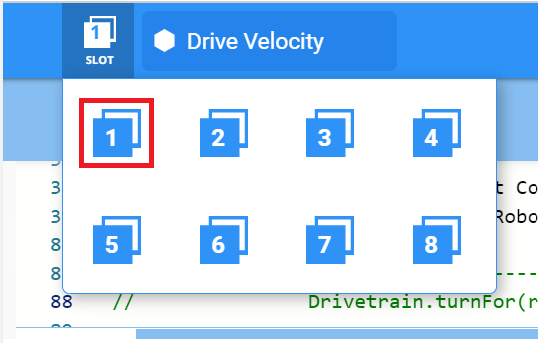
Selecione o ícone Slot para escolher um dos oito slots disponíveis no Robot Brain e selecione o slot 1.
-
Conecte o V5 Robot Brain ao computador usando um cabo micro USB e ligue o V5 Robot Brain. O ícone do Cérebro na barra de ferramentas fica verde assim que uma conexão bem-sucedida for feita.

-
Selecione Download para baixar o projeto para o Brain.

![]() Caixa de ferramentas do professor
Caixa de ferramentas do professor
-
Lembre os alunos de desconectarem o cabo USB do Cérebro Robô. Ter o robô conectado a um computador durante a execução de um projeto pode fazer com que o robô puxe o cabo de conexão.
-
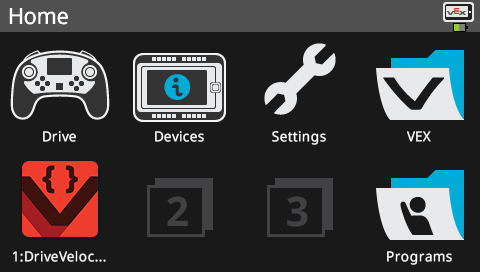
Verifique se o seu projeto foi (C++) olhando a tela do Robot Brain. O nome do projeto DriveVelocity deve estar listado no Slot 1.
![]() Caixa de ferramentas do professor
Caixa de ferramentas do professor
-
Pare e discuta
Peça aos alunos para preverem o que eles acham que acontecerá quando este projeto for baixado e executado no robô Speedbot. Peça aos alunos para registrarem suas previsões em seus cadernos de engenharia. Se o tempo permitir, peça a cada grupo que partilhe a sua previsão.Os alunos devem prever que o Speedbot avançará primeiro na velocidade padrão (50%), depois mais lento (25%) que a velocidade padrão e depois mais rápido (75%) que a velocidade padrão.
-
Modelo Primeiro
Modelo executando o projeto na frente da turma antes de todos os alunos tentarem ao mesmo tempo. Reúna os alunos em uma área e deixe espaço suficiente para o Speedbot se mover se for colocado no chão.Diga aos alunos que agora é a vez deles executarem o projeto. Certifique-se de que eles tenham um caminho livre e que nenhum Speedbots se esbarre.
-
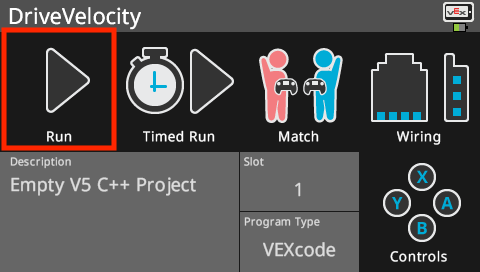
Execute(C++) o projeto no robô, certificando-se de que o projeto esteja selecionado e, em seguida, pressione o botão Run no Robot Brain. Parabéns por criar seu primeiro projeto!
Etapa 4: Avanço e ré por 150 mm em velocidades diferentes
Agora que você programou seu robô para avançar em velocidades diferentes, programe-o para avançar e retroceder em velocidades diferentes.
-
Altere o parâmetro na segunda instrução driveFor para exibir -150.
-
Selecione o nome do projeto para alterá-lo de DriveVelocity para ReverseVelocity.

-
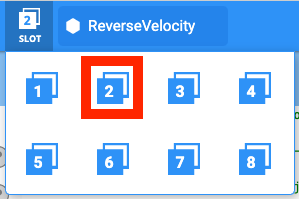
Selecione o ícone Slot para escolher um novo slot. Selecione o slot 2.
-
Baixe (C++) o projeto.

-
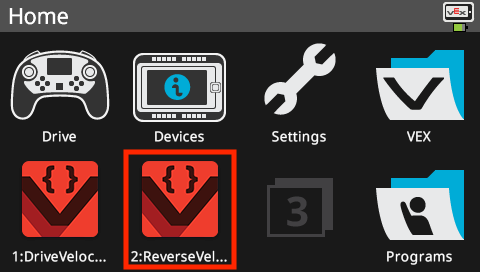
Verifique se o seu projeto foi (C++) olhando a tela do Robot Brain. O nome do projeto ReverseVelocity deve estar listado no Slot 2.
-
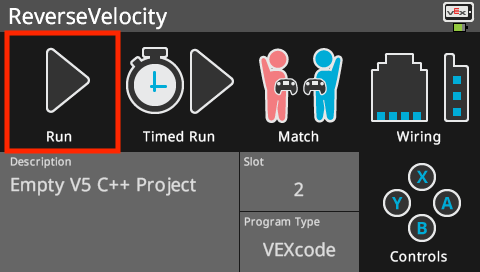
Execute (C++) o projeto no robô, certificando-se de que o projeto esteja selecionado e, em seguida, pressione o botão Run no Robot Brain.
![]() Caixa de ferramentas do professor
-
Concluindo a etapa 4
Caixa de ferramentas do professor
-
Concluindo a etapa 4
-
Para alterar o comando driveFor de forward para reverse, basta alterar o primeiro parâmetro para -150. Isso fará com que os motores do trem de força se movam na direção oposta.
-
O número de mm pode ser alterado, mas para este exemplo deixaremos em 150 mm conforme definido no passo anterior.
-
Lembre os alunos de desconectarem o cabo USB do Robot Brain antes de executar o projeto.
-
Lembre os alunos de salvar seus projetos enquanto trabalham. A Biblioteca VEX possui uma seção para C++ que explica as práticas de salvamento no VEXcode V5.
![]() Dicas para professores
Dicas para professores
Peça às equipes para compartilharem a área de teste e a bola, se necessário, mas também podem ser criadas várias áreas de teste, cada uma com sua própria bola. Decida se deseja configurar a(s) área(s) de teste ou se deseja que os alunos o façam.
Etapa 5: configurando sua área de teste

Exemplo de layout de área de teste
-
Use fita adesiva e uma régua para criar uma linha de 3m no chão, como a linha horizontal mostrada na imagem acima.
-
Depois que a linha for criada, use fita adesiva e sua régua mais uma vez para criar linhas de 1m através da linha de 3m, como as linhas verticais na imagem acima. Cole uma linha de 1m a cada marca de 50cm na linha vertical, começando em 0cm.
-
As linhas horizontais mais curtas devem estar centralizadas na linha vertical mais longa.
-
-
Enquanto a área está sendo montada, um ou dois membros da sua equipe deverão criar um novo projeto chamado Momentum. Defina a velocidade em 50% e faça o Speedbot avançar para a primeira linha a 50 cm. Lembre-se de 1 cm = 10 mm, para que o robô se desloque 50 cm ou 500 milímetros para frente.
![]() Caixa de Ferramentas do Professor
-
Por que esta atividade?
Caixa de Ferramentas do Professor
-
Por que esta atividade?
-
A coleta e análise de dados, até mesmo o simples reconhecimento de padrões, são habilidades científicas fundamentais. Esta atividade adiciona estrutura à análise de dados, evitando erros comuns.
-
Observe que as instruções não dizem aos alunos para variar a distância percorrida pelo robô juntamente com a variação da velocidade do robô. Esta é uma aplicação intencional do que os cientistas da aprendizagem chamam de Estratégia de Controle de Variáveis. Ensinar investigadores novatos a manipular uma variável de cada vez (ou seja, a velocidade, neste caso) para determinar sua influência sobre uma segunda variável (ou seja, a distância que a bola percorre após a colisão) é importante porque não é necessariamente uma abordagem que os alunos adotarão. espontaneamente através de uma abordagem de adivinhar e verificar. Abordagens típicas de adivinhação e verificação geralmente manipulam mais de uma variável por vez (ou seja, alterando a velocidade e a distância que o robô percorre) e observando o impacto da confluência na distância que a bola percorre após a rotação. Esta atividade tenta afastar os alunos disso porque as relações entre as variáveis são então ambíguas. É a maior velocidade do robô, a distância que o robô percorre ou ambos que levam a bola a percorrer uma distância maior? Não podemos responder a isso quando manipulamos as duas variáveis ao mesmo tempo.
-
No entanto, as equipes podem tentar espontaneamente conduzir o robô por diferentes distâncias. Se você observar isso, peça-lhes apenas para alterar a distância, mas manter a velocidade igual à de um teste com a distância original de 500 mm. Dessa forma, eles podem comparar a mesma velocidade com diferentes distâncias percorridas para ver se a distância percorrida pelo robô também influencia a distância percorrida pela bola.
Etapa 6: Testando a transferência de energia durante colisões

Área de teste de desafio de boliche com robô e bola
Centralize a bola na linha horizontal a 50cm e coloque seu robô de forma que a frente dela fique centralizada na linha horizontal a 0cm. Certifique-se de que a frente do robô esteja voltada para a direção da bola. Execute seu primeiro projeto Momentum com velocidade definida para 50% e preste muita atenção enquanto o robô colide com a bola.
Registre a velocidade definida, a distância percorrida e a distância que a bola percorreu nesta tabela de dados (Google ). A primeira linha da tabela foi iniciada para você com base no projeto Momentum em que você trabalhou na etapa anterior. Continue adicionando dados a esta tabela enquanto tenta definir velocidades diferentes. Você pode então adicionar dados de outras equipes enquanto discute suas descobertas em classe.
![]() Dicas para professores
Dicas para professores
-
Prepare a área para a bola quicar em direções variadas e distâncias variadas. Feche portas e/ou janelas conforme necessário.
-
A tabela para Explorando a Velocidade pode ser salva abaixo ou os alunos podem recriar a tabela em seus cadernos de engenharia.
-
Uma rubrica para avaliar notebooks de engenharia equipe pode ser encontrada aqui (Google ), e uma rubrica para avaliar notebooks individuais pode ser encontrada aqui (Google . pdf). Sempre que você planejar avaliar o trabalho dos alunos com uma(s) rubrica(s), certifique-se de compartilhar a rubrica com eles antes de começarem a trabalhar no projeto.

Pense e responda às perguntas abaixo em seu caderno de engenharia ao coletar seus dados:
-
Como você pode saber se o momento do robô transferiu energia para a bola durante a colisão? Explique com detalhes.
-
Repita o teste pelo menos mais duas vezes. Experimente uma velocidade inferior a 50%. Reponha a bola na sua posição e registe na tabela a distância percorrida pela bola. Além disso, tente uma velocidade superior a 50%. Reponha a bola na sua posição e registe na tabela a distância percorrida pela bola.
-
Quando todos os grupos tiverem concluído os três testes, discuta as velocidades que os outros grupos escolheram e a distância percorrida pela bola nos seus testes. À medida que as equipes compartilham seus dados, adicione as descobertas à sua tabela.
-
Procure padrões nos dados. A distância percorrida pela bola aumenta ou diminui à medida que a velocidade definida aumenta?
![]() Caixa de ferramentas do professor
-
respostas
Caixa de ferramentas do professor
-
respostas
-
O movimento da bola é uma evidência de que o robô transferiu energia durante a colisão. Os alunos também podem descrever a velocidade da bola após o impacto ou a direção de deslocamento como evidência.
-
A distância que a bola percorre depende da massa/peso da bola utilizada e da velocidade definida para o robô.
-
Os alunos devem reconhecer que velocidades mais altas levam a bola a viajar mais longe do que velocidades mais baixas. Conecte isso explicitamente ao momento do robô. Destaque que o peso do robô não mudou, apenas a sua velocidade, mas que ambos contribuem para o impulso do robô. Pergunte-lhes se acham que a bola viajaria tão longe se o robô fosse mais pesado. Provavelmente sim. Há mais informações sobre os efeitos da massa da bola durante a colisão na próxima leitura.
-
Os grupos de alunos podem ter seleccionado velocidades amplamente variáveis, mas o objectivo geral de aprendizagem é que os alunos reconheçam que velocidades mais elevadas levam a um maior impulso, o que transfere mais energia para a bola durante as colisões.