
![]() กล่องเครื่องมือครู
กล่องเครื่องมือครู
-
โครงร่างกิจกรรม
การสำรวจนี้จะแนะนำให้นักเรียนตั้งค่าความเร็วในการขับขี่ก่อน จากนั้นขอให้พวกเขาสำรวจว่าความเร็วของหุ่นยนต์ส่งผลต่อโมเมนตัมของมันอย่างไร คลิกที่นี่ (Google / .docx / .pdf) เพื่อดูโครงร่างของกิจกรรมนี้ การทำความเข้าใจโมเมนตัมของหุ่นยนต์จะเป็นแนวคิดสำคัญในการนำไปใช้กับเกมโบว์ลิ่ง Strike Challenge -
สิ่งที่นักเรียนจะตั้งโปรแกรม
การใช้โปรเจ็กต์เทมเพลต Speedbot (ระบบขับเคลื่อน 2 มอเตอร์ ไม่มีไจโร) ช่วยให้นักเรียนเปลี่ยนการตั้งค่าความเร็วของ Speedbot เพียงเพิ่มคำสั่ง setDriveVelocity (50 เปอร์เซ็นต์) ให้กับ driveFor (1 , นิ้ว) คำสั่ง ส่วนที่แนะนำของกิจกรรมคือให้นักเรียนเคลื่อน Speedbot ด้วยความเร็วที่แตกต่างกัน และเมื่อสิ้นสุดกิจกรรมขอให้พวกเขาใช้ทักษะในการเขียนโปรแกรมความเร็วเพื่อทดสอบโมเมนตัมและการถ่ายโอนพลังงาน
Speedbot พร้อมที่จะขับด้วยความเร็วที่แตกต่างกัน!
การตรวจสอบนี้จะช่วยให้คุณเรียนรู้เพิ่มเติมเกี่ยวกับการเขียนโปรแกรม Speedbot ให้ขับด้วยความเร็วที่เหมาะสมที่สุดสำหรับงาน ในตอนจบของ Strike Challenge คุณจะต้องค้นหาความเร็วของ Speedbot ที่ช่วยให้มันเร็วและมีโมเมนตัมที่ยอดเยี่ยม แต่ยังคงควบคุมได้เพื่อที่จะตีลูกบอลในมุมที่ดีและมีกำลังมหาศาล
![]() กล่องเครื่องมือครู
กล่องเครื่องมือครู
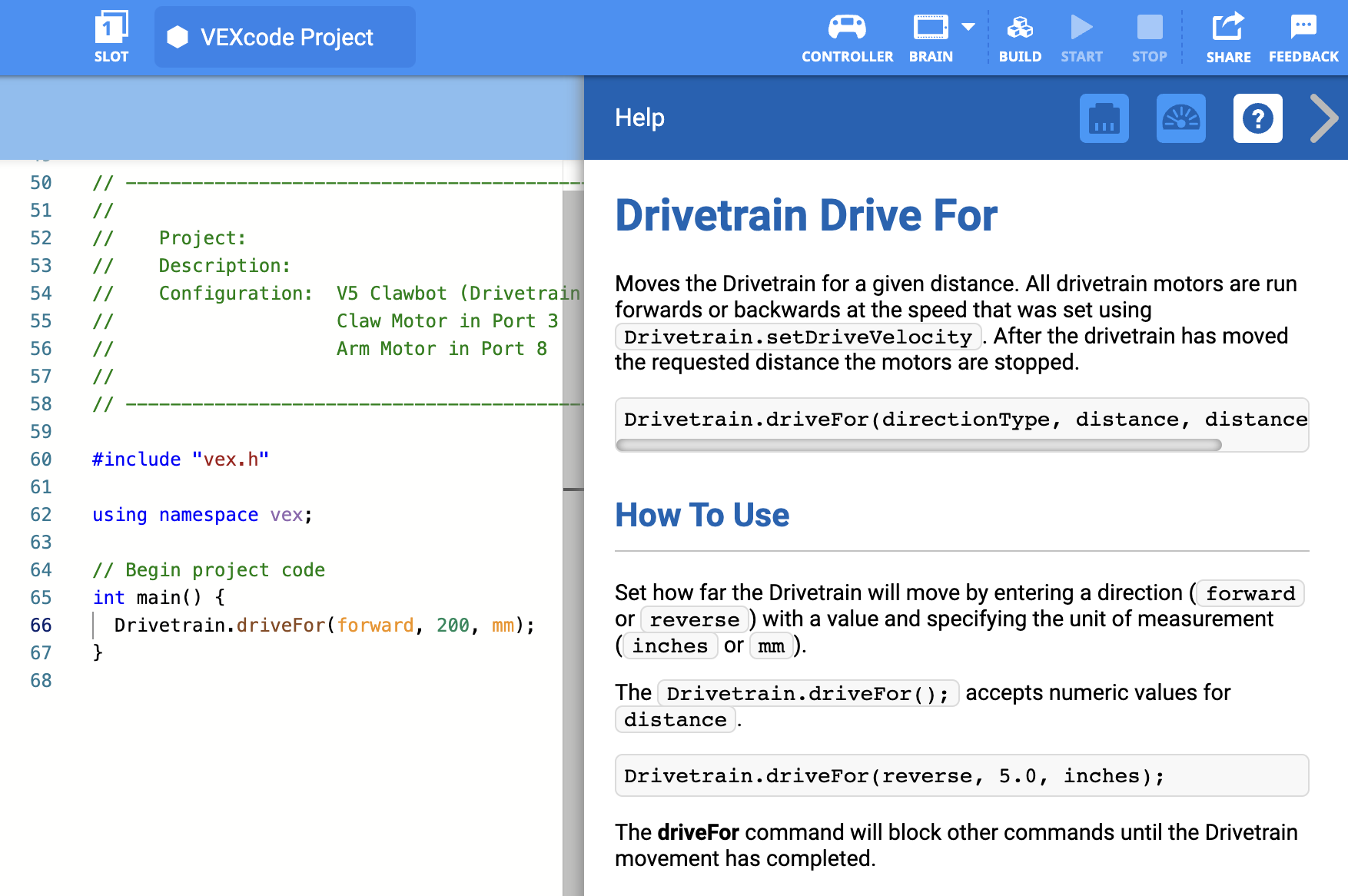
นี่คือภาพรวมของ User Interface ของ VEXcode V5 นักเรียนจะได้รู้จักกับแท็บ/ปุ่มเหล่านี้ระหว่างกิจกรรมใน Momentum Alley STEM Lab นี้ นอกจากนี้ยังมีลิงก์ให้ทั่วทั้ง STEM Lab เพื่อให้ข้อมูลเพิ่มเติมเกี่ยวกับแท็บ/ปุ่มเหล่านี้
คำแนะนำ VEXcode V5 ที่จะใช้ในส่วนแรกของการตรวจสอบนี้:
-
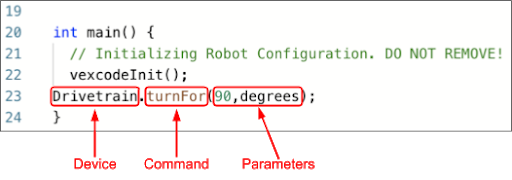
Drivetrain.setDriveVelocity(50, เปอร์เซ็นต์);
-
ระบบขับเคลื่อน.driveFor(ไปข้างหน้า, 200, มม.);
-
หากต้องการข้อมูลเพิ่มเติมเกี่ยวกับคำแนะนำ ให้เลือกวิธีใช้ จากนั้นเลือกไอคอนเครื่องหมายคำถามที่อยู่ถัดจากคำสั่งเพื่อดูข้อมูลเพิ่มเติม
ตรวจสอบให้แน่ใจว่าคุณมีฮาร์ดแวร์ที่จำเป็น ดาวน์โหลดโน้ตบุ๊กวิศวกรรม และ VEXcode V5 และพร้อมใช้งานแล้ว
![]() เคล็ดลับของครู
เคล็ดลับของครู
หากนี่เป็นครั้งแรกของนักเรียนที่ใช้ VEXcode V5 พวกเขาสามารถอ้างอิงบทช่วยสอนได้ตลอดเวลาระหว่างการสำรวจนี้ บทช่วยสอนจะอยู่ในแถบเครื่องมือ

นักเรียนแต่ละกลุ่มควรได้รับฮาร์ดแวร์ที่จำเป็นและสมุดบันทึกด้านวิศวกรรมของกลุ่ม จากนั้นเปิด VEXcode V5
| ปริมาณ | วัสดุที่จำเป็น |
|---|---|
| 1 |
หุ่นยนต์สปีดบอท |
| 1 |
แบตเตอรี่หุ่นยนต์ที่ชาร์จแล้ว |
| 1 |
VEXโค้ด V5 |
| 1 |
สาย USB (หากใช้คอมพิวเตอร์) |
| 1 |
สมุดบันทึกวิศวกรรมศาสตร์ |
| 1 |
ลูกบอล (ขนาดและรูปร่างของลูกฟุตบอล) |
| 1 |
พื้นที่โล่ง 3x3 เมตร |
| 1 |
ไม้มิเตอร์หรือไม้บรรทัด |
| 1 |
ม้วนเทป |
| 1 |
![]() เคล็ดลับของครู
เคล็ดลับของครู
จำลองขั้นตอนการแก้ปัญหาแต่ละขั้นตอนให้กับนักเรียน
ขั้นตอนที่ 2: เริ่มโครงการใหม่
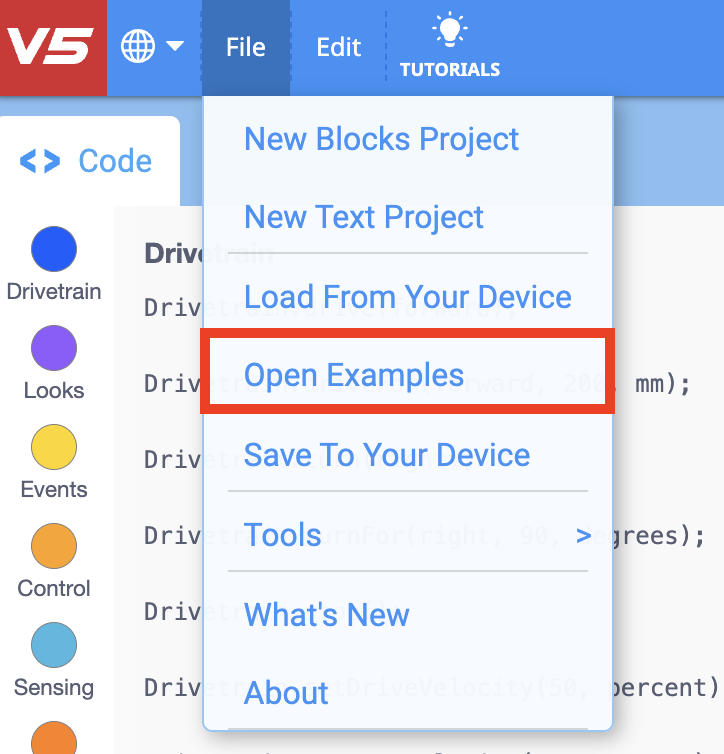
ทำตามขั้นตอนต่อไปนี้เพื่อเริ่มโครงการ:
-
เปิดเมนูไฟล์แล้วเลือกเปิดตัวอย่าง
-
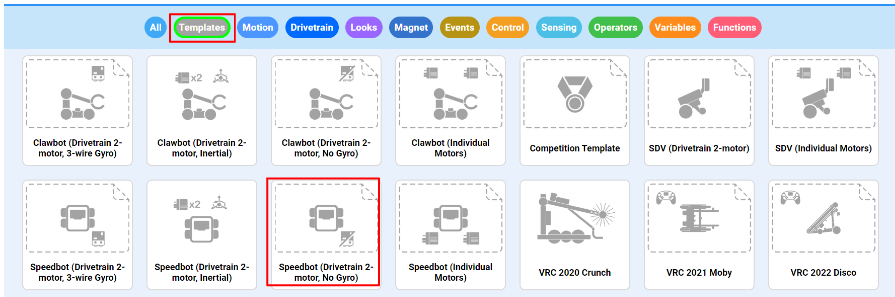
เลือกและเปิดโปรเจ็กต์เทมเพลต Speedbot (ระบบขับเคลื่อน 2 มอเตอร์ ไม่มีไจโร) โครงการเทมเพลตประกอบด้วยกำหนดค่ามอเตอร์ ของ Speedbot หากไม่ได้ใช้เทมเพลต หุ่นยนต์ของคุณจะไม่สามารถดำเนินโครงการได้อย่างถูกต้อง
-
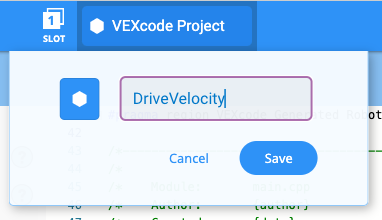
เนื่องจากคุณจะต้องทำงานเกี่ยวกับการสำรวจความเร็ว คุณจะต้องตั้งชื่อโปรเจ็กต์ของคุณ DriveVelocity เมื่อเสร็จแล้ว ให้เลือก บันทึก
![]() เคล็ดลับของครู
เคล็ดลับของครู
-
ชื่อโปรเจ็กต์สามารถมีช่องว่างระหว่างหรือหลังคำได้

-
คุณสามารถขอให้นักเรียนเพิ่มชื่อย่อหรือชื่อกลุ่มลงในชื่อโปรเจ็กต์ได้ ซึ่งจะช่วยแยกแยะโปรเจ็กต์ต่างๆ หากคุณขอให้นักเรียนส่ง
-
เนื่องจากนี่เป็นกิจกรรมแรกในการเขียนโปรแกรมที่นักเรียนของคุณอาจลองทำ คุณควรจำลองขั้นตอนต่างๆ แล้วขอให้นักเรียนดำเนินการแบบเดียวกัน จากนั้นครูควรติดตามนักเรียนเพื่อให้แน่ใจว่าพวกเขาทำตามขั้นตอนอย่างถูกต้อง
-
ตรวจสอบให้แน่ใจว่านักเรียนได้เลือก Open Examples จากเมนู File
-
ตรวจสอบให้แน่ใจว่านักเรียนได้เลือกโปรเจ็กต์เทมเพลต Speedbot (ระบบขับเคลื่อน 2 มอเตอร์ ไม่มีไจโร)
-
คุณสามารถชี้ให้นักเรียนเห็นว่ามีหลายตัวเลือกให้เลือกในหน้าตัวอย่าง ขณะที่พวกเขาสร้างและใช้หุ่นยนต์ตัวอื่น พวกเขาจะมีโอกาสใช้เทมเพลตที่แตกต่างกัน
-
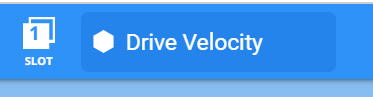
ตรวจสอบให้แน่ใจว่าชื่อโปรเจ็กต์ DriveVelocity อยู่ในหน้าต่างตรงกลางของแถบเครื่องมือแล้ว
![]() กล่องเครื่องมือครู
-
บันทึกโครงการ
กล่องเครื่องมือครู
-
บันทึกโครงการ
-
ชี้ให้เห็นว่าเมื่อพวกเขาเปิด VEXcode V5 เป็นครั้งแรก หน้าต่างจะมีป้ายกำกับว่า VEXcode Project โครงการ VEXcode เป็นชื่อโครงการเริ่มต้นเมื่อเปิด VEXcode V5 ครั้งแรก เมื่อเปลี่ยนชื่อโปรเจ็กต์เป็น Drive และบันทึกแล้ว จอแสดงผลก็ได้รับการอัปเดตเพื่อแสดงชื่อโปรเจ็กต์ใหม่ การใช้หน้าต่างนี้ในแถบเครื่องมือทำให้ง่ายต่อการตรวจสอบว่านักเรียนกำลังใช้โครงงานที่ถูกต้อง
-
บอกนักเรียนว่าพวกเขาพร้อมที่จะเริ่มโครงงานแรกแล้ว อธิบายให้นักเรียนฟังว่าเพียงทำตามขั้นตอนง่ายๆ ไม่กี่ขั้นตอน ก็จะสามารถสร้างและดำเนินโครงการที่จะขับเคลื่อน Speedbot ไปข้างหน้าได้
-
เตือนนักเรียนให้บันทึกโครงงานของตนขณะทำงาน ส่วน C++ จาก VEX Library อธิบายแนวทางปฏิบัติในการบันทึกใน VEXcode V5
![]() กล่องเครื่องมือครู
-
หยุดและอภิปราย
กล่องเครื่องมือครู
-
หยุดและอภิปราย
นี่เป็นจุดที่ดีที่จะหยุดชั่วคราวและให้นักเรียนทบทวนขั้นตอนที่เพิ่งเสร็จสิ้นในการเริ่มโปรเจ็กต์ใหม่ใน VEXcode V5 เป็นรายบุคคลหรือเป็นกลุ่ม ขอให้นักเรียนไตร่ตรองเป็นรายบุคคลก่อนแบ่งปันภายในกลุ่มหรือกับทั้งชั้นเรียน
ขั้นตอนที่ 3: ขับไปข้างหน้า 150 มม. ด้วยความเร็วที่ต่างกัน
ตอนนี้คุณพร้อมที่จะเริ่มตั้งโปรแกรมหุ่นยนต์ให้ขับเคลื่อนไปข้างหน้าด้วยความเร็วที่แตกต่างกันแล้ว!
-
ก่อนที่เราจะเริ่มเขียนโปรแกรมเราต้องเข้าใจว่าคำสั่งคืออะไร คำสั่งมีสามส่วน
![]() เคล็ดลับของครู
เคล็ดลับของครู
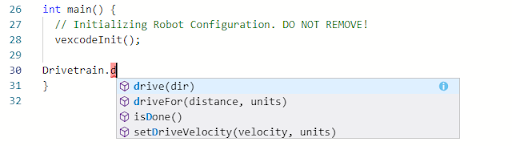
คุณอาจสังเกตเห็นฟังก์ชันเติมข้อความอัตโนมัติเมื่อคุณเริ่มพิมพ์คำสั่ง ใช้ปุ่ม "ขึ้น" และ "ลง" เพื่อเลือกชื่อที่คุณต้องการ จากนั้นกด "Tab" หรือ (Enter/Return) บนแป้นพิมพ์เพื่อทำการเลือก สำหรับข้อมูลเพิ่มเติมเกี่ยวกับคุณลักษณะนี้ โปรดดูบทความ C++
-
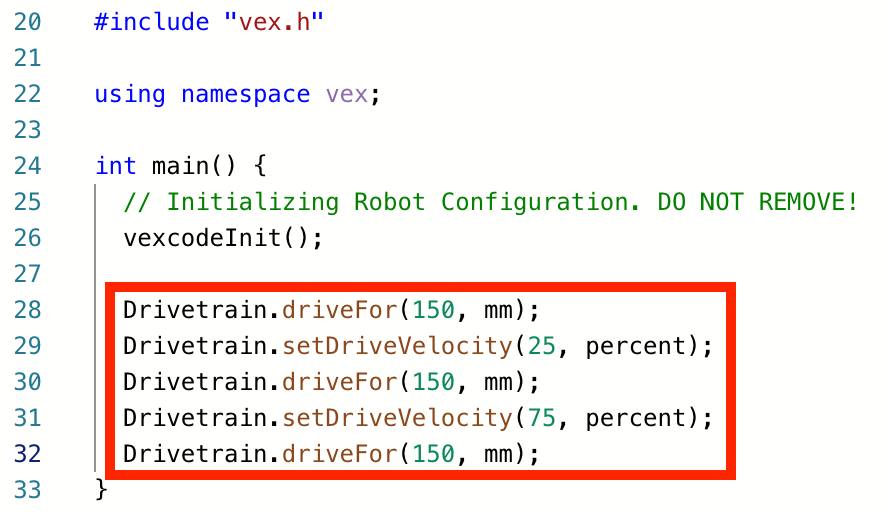
เพิ่มคำแนะนำในโครงการ:
![]() เคล็ดลับของครู
เคล็ดลับของครู
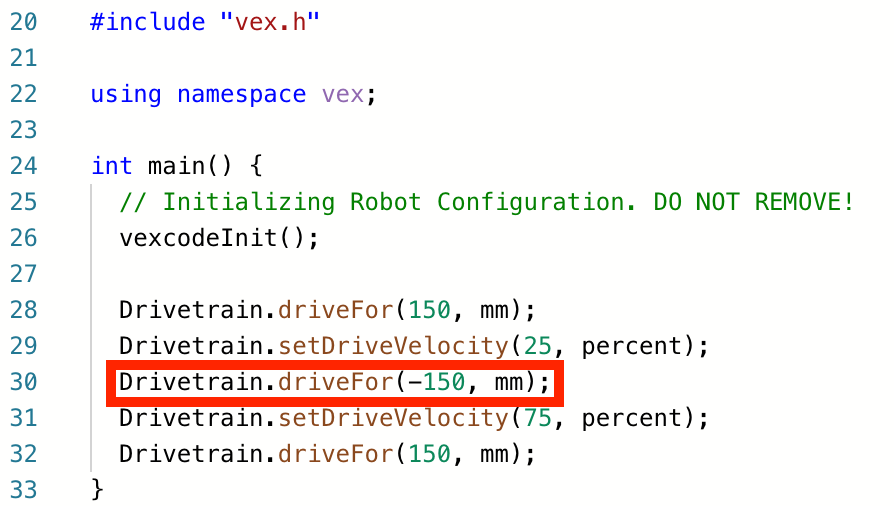
โปรดสังเกตว่าในคำสั่งที่สองและสาม (บรรทัดที่ 29 และ 30) จะเหมือนกับคำสั่งที่สี่และห้า (บรรทัดที่ 31 และ 32) แต่มีพารามิเตอร์ความเร็วที่แตกต่างกัน หลังจากเพิ่มคำสั่งที่สามแล้ว นักเรียนสามารถไฮไลต์บรรทัด 29 และ 30 เพื่อคัดลอกและวางบรรทัดด้านล่างเพื่อสร้างบรรทัด 31 และ 32 จากนั้นพวกเขาก็สามารถเปลี่ยนความเร็วในบรรทัดที่ 31 เป็น 75 เปอร์เซ็นต์
-
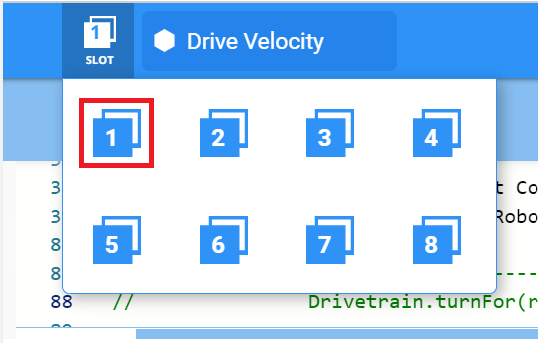
เลือกไอคอนช่องเพื่อเลือกหนึ่งในแปดช่องที่มีอยู่บน Robot Brain และเลือกช่องที่ 1
-
เชื่อมต่อ V5 Robot Brain เข้ากับคอมพิวเตอร์โดยใช้สายไมโคร USB และเปิด V5 Robot Brain ไอคอน Brain ในแถบเครื่องมือ เปลี่ยนเป็นสีเขียว เมื่อทำการเชื่อมต่อสำเร็จ

-
เลือก ดาวน์โหลด เพื่อดาวน์โหลดโครงการไปยัง Brain

![]() กล่องเครื่องมือครู
กล่องเครื่องมือครู
-
เตือนผู้เรียนให้ถอดสาย USB ออกจาก Robot Brain การมีหุ่นยนต์เชื่อมต่อกับคอมพิวเตอร์ในขณะที่ดำเนินโครงการอาจทำให้หุ่นยนต์ดึงสายเชื่อมต่อ
-
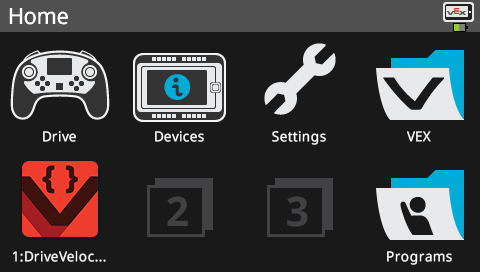
ตรวจสอบให้แน่ใจว่าโปรเจ็กต์ของคุณมีการดาวน์โหลด (C++) โดยดูที่หน้าจอของ Robot Brain ชื่อโปรเจ็กต์ DriveVelocity ควรแสดงอยู่ในช่อง 1
![]() กล่องเครื่องมือครู
กล่องเครื่องมือครู
-
หยุดและอภิปราย
ขอให้นักเรียนคาดการณ์สิ่งที่พวกเขาคิดว่าจะเกิดขึ้นเมื่อมีการดาวน์โหลดและรันโปรเจ็กต์นี้บนหุ่นยนต์ Speedbot บอกให้นักเรียนบันทึกคำทำนายลงในสมุดบันทึกทางวิศวกรรม หากมีเวลา ขอให้แต่ละกลุ่มแบ่งปันคำทำนายของตนนักเรียนควรคาดการณ์ว่า Speedbot จะเคลื่อนที่ไปข้างหน้าในขั้นแรกด้วยความเร็วเริ่มต้น (50%) จากนั้นจะช้ากว่า (25%) จากความเร็วเริ่มต้น และเร็วขึ้น (75%) จากความเร็วเริ่มต้น
-
โมเดลแรก
โมเดลดำเนินโครงการหน้าชั้นเรียนก่อนที่จะให้นักเรียนทุกคนลองทำพร้อมกัน รวบรวมนักเรียนไว้ในบริเวณเดียวและปล่อยให้มีที่เพียงพอให้สปีดบอทเคลื่อนที่ได้หากวางอยู่บนพื้นบอกนักเรียนว่าตอนนี้ถึงคราวที่พวกเขาต้องทำโครงงานแล้ว ตรวจสอบให้แน่ใจว่าพวกเขามีเส้นทางที่ชัดเจน และไม่มีสปีดบอทมาชนกัน
-
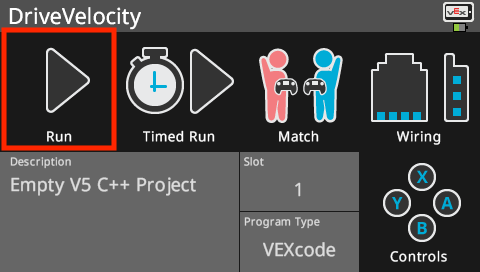
รัน(C++) โปรเจ็กต์บนหุ่นยนต์โดยตรวจสอบให้แน่ใจว่าได้เลือกโปรเจ็กต์แล้ว จากนั้นกดปุ่ม Run บน Robot Brain ขอแสดงความยินดีกับการสร้างโครงการแรกของคุณ!
ขั้นตอนที่ 4: ขับไปข้างหน้าและถอยหลังเป็นเวลา 150 มม. ด้วยความเร็วที่ต่างกัน
ตอนนี้คุณได้ตั้งโปรแกรมหุ่นยนต์ของคุณให้ขับเคลื่อนไปข้างหน้าด้วยความเร็วที่แตกต่างกันแล้ว ให้ตั้งโปรแกรมให้หุ่นยนต์ขับเคลื่อนไปข้างหน้าและถอยหลังด้วยความเร็วที่แตกต่างกัน
-
เปลี่ยนพารามิเตอร์ในไดรฟ์ ตัวที่สองสำหรับคำสั่ง เพื่อแสดง -150
-
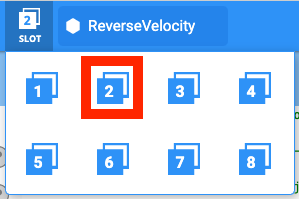
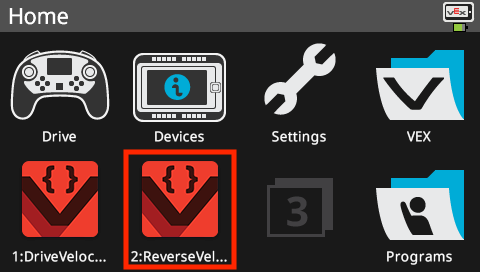
เลือกชื่อโปรเจ็กต์เพื่อเปลี่ยนจาก DriveVelocity เป็น ReverseVelocity

-
เลือกไอคอนช่องเพื่อเลือกช่องใหม่ เลือกช่องที่ 2
-
ดาวน์โหลด (C++) โครงการ

-
ตรวจสอบให้แน่ใจว่าโปรเจ็กต์ของคุณมีการดาวน์โหลด (C++) โดยดูที่หน้าจอของ Robot Brain ชื่อโปรเจ็กต์ ReverseVelocity ควรแสดงอยู่ใน Slot 2
-
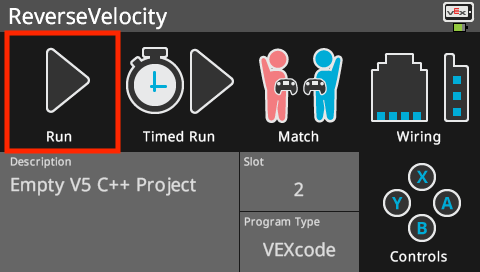
รัน (C++) โปรเจ็กต์บนหุ่นยนต์โดยตรวจสอบให้แน่ใจว่าได้เลือกโปรเจ็กต์แล้ว จากนั้นกดปุ่ม Run บน Robot Brain
![]() กล่องเครื่องมือสำหรับครู
-
เสร็จสิ้นขั้นตอนที่ 4
กล่องเครื่องมือสำหรับครู
-
เสร็จสิ้นขั้นตอนที่ 4
-
หากต้องการเปลี่ยนไดรฟ์ สำหรับคำสั่ง จาก ไปข้างหน้า เป็น ย้อนกลับเพียงเปลี่ยนพารามิเตอร์แรกเป็น -150 ซึ่งจะทำให้มอเตอร์ในระบบขับเคลื่อนเคลื่อนที่ไปในทิศทางตรงกันข้าม
-
จำนวน มม. สามารถเปลี่ยนแปลงได้ แต่สำหรับตัวอย่างนี้ เราจะปล่อยให้มันอยู่ที่ 150 มม. ตามที่ตั้งไว้ในขั้นตอนก่อนหน้า
-
เตือนให้นักเรียนถอดสาย USB ออกจาก Robot Brain ก่อนดำเนินโครงการ
-
เตือนนักเรียนให้บันทึกโครงงานของตนขณะทำงาน VEX Library มีส่วนสำหรับ C++ ที่อธิบายแนวทางปฏิบัติในการบันทึกใน VEXcode V5
![]() เคล็ดลับของครู
เคล็ดลับของครู
ขอให้ทีมแบ่งปันพื้นที่ทดสอบและลูกบอลหากจำเป็น แต่สามารถจัดเตรียมพื้นที่ทดสอบหลายแห่งด้วยลูกบอลของตัวเองได้เช่นกัน ตัดสินใจว่าคุณต้องการตั้งค่าพื้นที่ทดสอบหรือต้องการให้นักเรียนทำเช่นนั้น
ขั้นตอนที่ 5: การตั้งค่าพื้นที่ทดสอบของคุณ

ตัวอย่างเค้าโครงพื้นที่ทดสอบ
-
ใช้เทปและแท่งมิเตอร์เพื่อสร้างเส้นยาว 3 เมตรบนพื้นเหมือนกับเส้นแนวนอนที่แสดงในภาพด้านบน
-
หลังจากสร้างเส้นแล้ว ให้ใช้เทปและแท่งมิเตอร์อีกครั้งเพื่อสร้างเส้นยาว 1 เมตรพาดผ่านเส้น 3 เมตร เช่นเดียวกับเส้นแนวตั้งในภาพด้านบน ติดเทปเส้นแนวตั้งขนาด 1 ม. ทุก ๆ 50 ซม. โดยเริ่มจาก 0 ซม.
-
เส้นแนวนอนที่สั้นกว่าควรอยู่กึ่งกลางของเส้นแนวตั้งที่ยาวกว่า
-
-
ในขณะที่พื้นที่กำลังถูกจัดเตรียม สมาชิกหนึ่งหรือสองคนในทีมของคุณควรสร้างโปรเจ็กต์ใหม่ชื่อโมเมนตัม ตั้งค่าความเร็วที่ 50% และให้ Speedbot ขับไปข้างหน้าไปยังบรรทัดแรกที่ระยะ 50 ซม. โปรดทราบว่า 1 ซม. = 10 มม. ดังนั้นหุ่นยนต์จะเคลื่อนที่ไปข้างหน้า 50 ซม. หรือ 500 มม.
![]() กล่องเครื่องมือสำหรับครู
-
ทำไมต้องทำกิจกรรมนี้
กล่องเครื่องมือสำหรับครู
-
ทำไมต้องทำกิจกรรมนี้
-
การรวบรวมและการวิเคราะห์ข้อมูล แม้แต่การจดจำรูปแบบง่ายๆ ก็เป็นทักษะพื้นฐานทางวิทยาศาสตร์ กิจกรรมนี้จะเพิ่มโครงสร้างให้กับการวิเคราะห์ข้อมูลโดยการป้องกันข้อผิดพลาดทั่วไป
-
โปรดสังเกตว่าคำแนะนำไม่ได้บอกให้นักเรียนเปลี่ยนระยะการขับเคลื่อนของหุ่นยนต์พร้อมกับการเปลี่ยนแปลงความเร็วของหุ่นยนต์ นี่เป็นการประยุกต์ใช้สิ่งที่นักวิทยาศาสตร์การเรียนรู้เรียกว่ากลยุทธ์การควบคุมตัวแปรโดยเจตนา การสอนผู้ตรวจสอบมือใหม่ให้จัดการตัวแปรทีละตัวในแต่ละครั้ง (กล่าวคือ ความเร็วในกรณีนี้) เพื่อกำหนดอิทธิพลของมันต่อตัวแปรตัวที่สอง (เช่น ระยะทางที่ลูกบอลเคลื่อนที่หลังจากการชน) มีความสำคัญเนื่องจากไม่จำเป็นว่าจะต้องเป็นแนวทางที่นักเรียนจะนำมาใช้ ด้วยวิธีเดาและตรวจสอบอย่างเป็นธรรมชาติ วิธีการเดาและตรวจสอบโดยทั่วไปมักจะจัดการกับตัวแปรมากกว่าหนึ่งตัวในแต่ละครั้ง (เช่น การเปลี่ยนแปลงทั้งความเร็วและระยะทางที่หุ่นยนต์เคลื่อนที่) และการสังเกตผลกระทบของจุดบรรจบกับระยะทางที่ลูกบอลเคลื่อนที่หลังการหมุน กิจกรรมนี้พยายามแนะนำนักเรียนให้ห่างจากสิ่งนั้น เนื่องจากความสัมพันธ์ระหว่างตัวแปรมีความคลุมเครือ มันเป็นความเร็วที่สูงกว่าของหุ่นยนต์ ระยะทางที่หุ่นยนต์ขับเคลื่อนได้ไกลขึ้น หรือทั้งสองอย่างที่ทำให้ลูกบอลเคลื่อนที่ได้ไกลขึ้นหรือไม่? เราไม่สามารถตอบได้ว่าเมื่อเราจัดการตัวแปรทั้งสองในเวลาเดียวกัน
-
อย่างไรก็ตาม ทีมอาจลองขับหุ่นยนต์ในระยะทางที่ต่างกันออกไปอย่างเป็นธรรมชาติ หากคุณสังเกตสิ่งนี้ ให้ขอให้พวกเขาเปลี่ยนระยะทางแต่รักษาความเร็วเท่าเดิมในการทดลองโดยใช้ระยะ 500 มม. เดิม ด้วยวิธีนี้ พวกเขาสามารถเปรียบเทียบความเร็วเดียวกันกับระยะการขับเคลื่อนที่แตกต่างกัน เพื่อดูว่าระยะการขับเคลื่อนของหุ่นยนต์ยังส่งผลต่อระยะทางที่ลูกบอลเคลื่อนที่หรือไม่
ขั้นตอนที่ 6: ทดสอบการถ่ายโอนพลังงานระหว่างการชน

พื้นที่ทดสอบความท้าทายโบว์ลิ่งพร้อมหุ่นยนต์และลูกบอล
วางลูกบอลให้อยู่กึ่งกลางเส้นแนวนอนที่ระยะ 50 ซม. และวางหุ่นยนต์ของคุณโดยให้ด้านหน้าของลูกบอลอยู่ตรงกลางเส้นแนวนอนที่ระยะ 0 ซม. ตรวจสอบให้แน่ใจว่าด้านหน้าของหุ่นยนต์หันหน้าไปทางทิศทางของลูกบอล ดำเนินโครงการโมเมนตัมแรกของคุณโดยตั้งความเร็วไว้ที่ 50% และให้ความสนใจเป็นพิเศษในขณะที่หุ่นยนต์ชนกับลูกบอล
บันทึกความเร็วที่ตั้งไว้ ระยะทางที่ขับเคลื่อน และระยะทางที่ลูกบอลเคลื่อนที่ในตารางข้อมูลนี้ (Google / .pdf) แถวแรกของตารางได้เริ่มต้นสำหรับคุณตามโครงการโมเมนตัมที่คุณทำในขั้นตอนก่อนหน้า เพิ่มข้อมูลลงในตารางนี้ต่อไปในขณะที่คุณลองตั้งค่าความเร็วที่แตกต่างกัน จากนั้นคุณสามารถเพิ่มข้อมูลของทีมอื่นๆ ขณะที่คุณอภิปรายสิ่งที่คุณค้นพบในชั้นเรียน
![]() เคล็ดลับของครู
เคล็ดลับของครู
-
เตรียมพื้นที่ให้ลูกบอลกระเด้งไปในทิศทางต่างๆ ตามระยะทางที่ต่างกัน ปิดประตูและ/หรือหน้าต่างตามความจำเป็น
-
คุณสามารถบันทึกตารางสำหรับการสำรวจความเร็วได้จากด้านล่าง หรือนักเรียนสามารถสร้างตารางใหม่ในสมุดบันทึกด้านวิศวกรรมของตนเองได้
-
คุณสามารถดูรูบริกสำหรับการประเมินสมุดบันทึกด้านวิศวกรรมของทีมได้ที่นี่ (Google / .docx / .pdf) และสามารถดูรูบริกสำหรับการประเมินสมุดบันทึกแต่ละรายการได้ที่นี่ (Google / .docx / )). เมื่อใดก็ตามที่คุณวางแผนประเมินงานของนักเรียนโดยใช้เกณฑ์การให้คะแนน อย่าลืมแบ่งปันเกณฑ์การให้คะแนนกับนักเรียนก่อนที่นักเรียนจะเริ่มโครงงาน

ลองคิดและตอบคำถามด้านล่างในสมุดบันทึกด้านวิศวกรรมของคุณในขณะที่คุณรวบรวมข้อมูล:
-
คุณจะบอกได้อย่างไรว่าโมเมนตัมของหุ่นยนต์ถ่ายโอนพลังงานไปยังลูกบอลระหว่างการชน อธิบายพร้อมรายละเอียด.
-
ทำซ้ำการทดสอบอย่างน้อยสองครั้ง ลองความเร็วน้อยกว่า 50% รีเซ็ตลูกบอลให้อยู่ในตำแหน่งเดิมและบันทึกในตารางว่าลูกบอลเคลื่อนที่ไปไกลแค่ไหน นอกจากนี้ให้ลองใช้ความเร็วมากกว่า 50% รีเซ็ตลูกบอลให้อยู่ในตำแหน่งเดิมและบันทึกในตารางว่าลูกบอลเคลื่อนที่ไปไกลแค่ไหน
-
เมื่อทุกกลุ่มทำแบบทดสอบทั้งสามเสร็จแล้ว ให้อภิปรายเกี่ยวกับความเร็วที่กลุ่มอื่นๆ เลือกและระยะทางที่ลูกบอลเคลื่อนที่ในการทดสอบ ขณะที่ทีมแชร์ข้อมูล ให้เพิ่มสิ่งที่ค้นพบลงในตารางของคุณ
-
ค้นหารูปแบบในข้อมูล ระยะทางที่ลูกบอลเคลื่อนที่เพิ่มขึ้นหรือลดลงเมื่อความเร็วที่ตั้งไว้เพิ่มขึ้นหรือไม่
![]() กล่องเครื่องมือครู
-
คำตอบ
กล่องเครื่องมือครู
-
คำตอบ
-
การเคลื่อนที่ของลูกบอลเป็นหลักฐานว่าหุ่นยนต์ถ่ายโอนพลังงานระหว่างการชน นักเรียนอาจอธิบายความเร็วของลูกบอลหลังจากการชนหรือทิศทางการเคลื่อนที่เพื่อเป็นหลักฐาน
-
ระยะทางที่ลูกบอลเคลื่อนที่ขึ้นอยู่กับมวล/น้ำหนักของลูกบอลที่ใช้และความเร็วที่ตั้งไว้สำหรับหุ่นยนต์
-
นักเรียนควรตระหนักว่าความเร็วสูงจะทำให้ลูกบอลเคลื่อนที่ได้ไกลกว่าความเร็วที่ต่ำกว่า เชื่อมต่อสิ่งนี้กับโมเมนตัมของหุ่นยนต์อย่างชัดเจน เน้นย้ำว่าน้ำหนักของหุ่นยนต์ไม่ได้เปลี่ยนแปลง มีเพียงความเร็วเท่านั้น แต่ทั้งสองส่วนมีส่วนช่วยในโมเมนตัมของหุ่นยนต์ ถามพวกเขาว่าพวกเขาคิดว่าลูกบอลจะเคลื่อนที่ได้ไกลหรือไม่หากหุ่นยนต์หนักกว่า มันก็คงจะ.. จะมีข้อมูลเพิ่มเติมเกี่ยวกับผลกระทบของมวลของลูกบอลระหว่างการชนในการอ่านครั้งต่อไป
-
กลุ่มนักเรียนอาจเลือกความเร็วที่แปรผันได้อย่างกว้างขวาง แต่วัตถุประสงค์การเรียนรู้โดยรวมคือเพื่อให้นักเรียนรับรู้ว่าความเร็วที่สูงกว่าจะนำไปสู่โมเมนตัมที่มากขึ้น ซึ่งจะถ่ายเทพลังงานไปยังลูกบอลมากขึ้นในระหว่างการชน