
ക്ലാവ് പ്രോഗ്രാമിംഗ് - പൈത്തൺ
![]() ടീച്ചർ ടൂൾബോക്സ്
-
പ്രവർത്തന രൂപരേഖ
ടീച്ചർ ടൂൾബോക്സ്
-
പ്രവർത്തന രൂപരേഖ
-
ഈ പര്യവേഷണം വിദ്യാർത്ഥികളെ V5 ക്ലോബോട്ടിന്റെ ക്ലോ മോട്ടോറിന്റെ അടിസ്ഥാന പ്രോഗ്രാമിംഗിലേക്ക് പരിചയപ്പെടുത്തും.
-
ക്ലാവ് മോട്ടോർ പ്രോഗ്രാം ചെയ്യാൻ പഠിക്കുന്നത്, V5 ക്ലാവ്ബോട്ട് അതിന്റെ പരിസ്ഥിതിയിലുള്ള വസ്തുക്കളെ എങ്ങനെ ഗ്രഹിക്കുന്നുവെന്ന് ശരിയായി നിയന്ത്രിക്കാൻ വിദ്യാർത്ഥികളെ പ്രാപ്തരാക്കുന്നു.
V5 Clawbot മനസ്സിലാക്കാൻ തയ്യാറാണ്!
ഈ പര്യവേക്ഷണം നിങ്ങളെ V5 ക്ലോബോട്ടിന്റെ നഖം ഉപയോഗിച്ച് വസ്തുക്കളെ ഗ്രഹിക്കാൻ സഹായിക്കുന്ന ചില രസകരമായ പ്രോജക്ടുകൾ സൃഷ്ടിക്കാൻ തുടങ്ങും.
- ഈ പര്യവേഷണത്തിൽ ഉപയോഗിക്കുന്ന VEXcode V5 പൈത്തൺ കമാൻഡുകളിൽ ഇവ ഉൾപ്പെടുന്നു:
- claw_motor.set_position(0, ഡിഗ്രികൾ)
- claw_motor.spin_for(മുന്നോട്ട്, 90, ഡിഗ്രി)
- claw_motor.set_timeout(2, സെക്കൻഡ്)
-
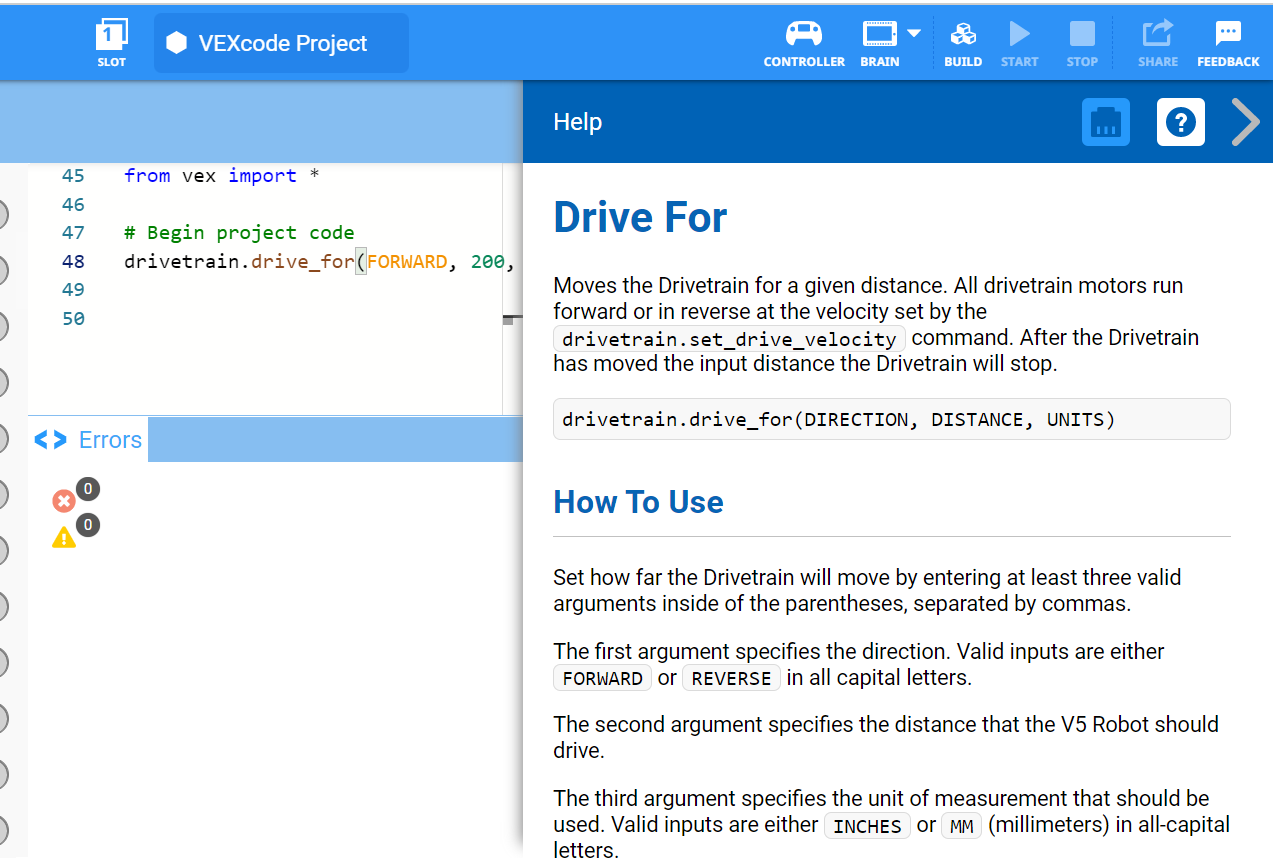
കമാൻഡിനെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾ കണ്ടെത്താൻ, കൂടുതൽ വിവരങ്ങൾ കാണുന്നതിന് ഒരു കമാൻഡിന് അടുത്തുള്ള ചോദ്യചിഹ്ന ഐക്കൺ തിരഞ്ഞെടുക്കുക..
- ആവശ്യമായ ഹാർഡ്വെയർ, എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്ക്, VEXcode V5 എന്നിവ ഡൗൺലോഡ് ചെയ്ത് തയ്യാറായിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
| അളവ് | ആവശ്യമായ വസ്തുക്കൾ |
|---|---|
| 1 |
VEX V5 ക്ലാസ്റൂം സ്റ്റാർട്ടർ കിറ്റ് (കാലികമായ ഫേംവെയറോടുകൂടി) |
| 1 |
VEXcode V5 |
| 1 |
എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്ക് |
| 1 |
ക്ലോബോട്ട്, അഡ്വാൻസ്ഡ് ട്രെയിനിംഗ് ബോട്ട് (ഡ്രൈവ്ട്രെയിൻ 2-മോട്ടോർ, ഗൈറോ ഇല്ല) ഉദാഹരണ പ്രോജക്റ്റ് |
| 1 |
അലുമിനിയം ക്യാൻ |
ഘട്ടം 1: പര്യവേക്ഷണത്തിനുള്ള തയ്യാറെടുപ്പ്
പ്രവർത്തനം ആരംഭിക്കുന്നതിന് മുമ്പ്, ഈ ഇനങ്ങൾ ഓരോന്നും നിങ്ങളുടെ കൈവശം തയ്യാറായിട്ടുണ്ടോ? ഇനിപ്പറയുന്നവയിൽ ഓരോന്നും പരിശോധിക്കുക:
-
മോട്ടോറുകൾ ശരിയായ പോർട്ടുകളിൽ പ്ലഗ് ചെയ്തിട്ടുണ്ടോ?
-
എല്ലാ മോട്ടോറുകളിലും സ്മാർട്ട് കേബിളുകൾപൂർണ്ണമായുംചേർത്തിട്ടുണ്ടോ?
-
ബാറ്ററിചാർജ്ജ്ആണോ?
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
വിദ്യാർത്ഥികൾക്കായി ഓരോ പ്രശ്നപരിഹാര ഘട്ടങ്ങളും മാതൃകയാക്കുക.
ഘട്ടം 2: ഒരു പുതിയ പ്രോജക്റ്റ് ആരംഭിക്കുക
നിങ്ങളുടെ പ്രോജക്റ്റ് ആരംഭിക്കുന്നതിന് മുമ്പ്, ശരിയായ ടെംപ്ലേറ്റ് പ്രോജക്റ്റ് തിരഞ്ഞെടുക്കുക. ക്ലോബോട്ട് ആൻഡ് അഡ്വാൻസ്ഡ് ട്രെയിനിംഗ് ബോട്ട് (ഡ്രൈവ്ട്രെയിൻ 2-മോട്ടോർ, നോ ഗൈറോ) ഉദാഹരണ പ്രോജക്റ്റിൽ ക്ലോബോട്ടിന്റെ മോട്ടോർ കോൺഫിഗറേഷൻ അടങ്ങിയിരിക്കുന്നു. ടെംപ്ലേറ്റ് ഉപയോഗിക്കുന്നില്ലെങ്കിൽ, നിങ്ങളുടെ റോബോട്ട് പ്രോജക്റ്റ് ശരിയായി പ്രവർത്തിപ്പിക്കില്ല.

ഇനിപ്പറയുന്ന ഘട്ടങ്ങൾ പൂർത്തിയാക്കുക:
- ഫയൽ മെനു തുറക്കുക.
- തിരഞ്ഞെടുക്കുകതുറക്കുകഉദാഹരണങ്ങൾ.
- Clawbot ഉം Advanced TrainingBot ഉം (Drivetrain 2-motor, No Gyro) ഉദാഹരണ പ്രോജക്റ്റ് തിരഞ്ഞെടുത്ത് തുറക്കുക.
- നമ്മൾ ക്ലാവിനെ നിയന്ത്രിക്കാൻ പ്രോഗ്രാം ചെയ്യുന്നതിനാൽ, നിങ്ങളുടെ പ്രോജക്റ്റ്ClawControlഎന്ന് പുനർനാമകരണം ചെയ്യുക.
- നിങ്ങളുടെ പ്രോജക്റ്റ്സംരക്ഷിക്കുക.
- ടൂൾബാറിന്റെ മധ്യത്തിലുള്ള വിൻഡോയിലാണ് ഇപ്പോൾ ClawControl എന്ന പ്രോജക്റ്റ് നാമം ഉള്ളതെന്ന് ഉറപ്പാക്കുക.

![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
- ഇത് പ്രോഗ്രാമിംഗോടുകൂടിയ ഒരു ആരംഭ പ്രവർത്തനമായതിനാൽ, അധ്യാപകൻ ഘട്ടങ്ങൾ മാതൃകയാക്കണം, തുടർന്ന് അതേ പ്രവർത്തനങ്ങൾ പൂർത്തിയാക്കാൻ വിദ്യാർത്ഥികളോട് ആവശ്യപ്പെടണം. തുടർന്ന് അധ്യാപകൻ വിദ്യാർത്ഥികൾ ഘട്ടങ്ങൾ ശരിയായി പാലിക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കാൻ അവരെ നിരീക്ഷിക്കണം.
- ഫയൽ മെനുവിൽ നിന്ന് വിദ്യാർത്ഥികൾ 'ഓപ്പൺ ഉദാഹരണങ്ങൾ' തിരഞ്ഞെടുത്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
- വിദ്യാർത്ഥികൾ Clawbot ഉം Advanced TrainingBot ഉം (Drivetrain 2-motor, No Gyro) ഉദാഹരണ പ്രോജക്റ്റ് തിരഞ്ഞെടുത്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക. ഉദാഹരണങ്ങൾ പേജിൽ നിന്ന് തിരഞ്ഞെടുക്കാൻ നിരവധി തിരഞ്ഞെടുപ്പുകൾ ഉണ്ടെന്ന് നിങ്ങൾക്ക് വിദ്യാർത്ഥികളെ ചൂണ്ടിക്കാണിക്കാം. അവർ മറ്റ് റോബോട്ടുകൾ നിർമ്മിക്കുകയും ഉപയോഗിക്കുകയും ചെയ്യുമ്പോൾ, അവർക്ക് വ്യത്യസ്ത ടെംപ്ലേറ്റുകൾ ഉപയോഗിക്കാനുള്ള അവസരം ലഭിക്കും.
- പ്രോജക്റ്റ് നാമത്തിൽ വിദ്യാർത്ഥികളോട് അവരുടെ ഇനീഷ്യലുകളോ ഗ്രൂപ്പിന്റെ പേരോ ചേർക്കാൻ ആവശ്യപ്പെടാം. വിദ്യാർത്ഥികളോട് പ്രോജക്ടുകൾ സമർപ്പിക്കാൻ ആവശ്യപ്പെടുകയാണെങ്കിൽ, അവ വ്യത്യസ്തമാക്കാൻ ഇത് സഹായിക്കും.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
നിർത്തി ചർച്ച ചെയ്യുക
ടീച്ചർ ടൂൾബോക്സ്
-
നിർത്തി ചർച്ച ചെയ്യുക
VEXcode V5-ൽ ഒരു പുതിയ പ്രോജക്റ്റ് ആരംഭിക്കുന്നതിനുള്ള ഘട്ടങ്ങൾ വിദ്യാർത്ഥി ഗ്രൂപ്പുകളുമായി അവലോകനം ചെയ്യാൻ ഇത് ഒരു നല്ല പോയിന്റാണ്.
ഘട്ടം 3: തുറക്കാൻ V5 Claw പ്രോഗ്രാം ചെയ്യുക
ഇനി നമ്മൾ നഖം തുറക്കാൻ പ്രോഗ്രാം ചെയ്തുകൊണ്ട് തുടങ്ങാൻ പോകുന്നു!
# ലൈബ്രറി vex ഇമ്പോർട്ടിൽ നിന്ന്
ഇമ്പോർട്ടുചെയ്യുന്നു *
# പ്രോജക്റ്റ് കോഡ്
ആരംഭിക്കുക claw_motor.set_position(0, DEGREES)- ക്ലാവിന്റെ ആരംഭ സ്ഥാനം സജ്ജമാക്കുന്നതിന് പ്രോഗ്രാമിംഗ് ഏരിയയിൽ മുകളിൽ കാണിച്ചിരിക്കുന്നതുപോലെclaw_motor.set_position()കമാൻഡ് എഴുതുക.
claw_motor.set_position(0, ഡിഗ്രികൾ)
claw_motor.set_timeout(2, സെക്കൻഡ്)- മുകളിൽ കാണിച്ചിരിക്കുന്നതുപോലെclaw_motor.set_timeout()കമാൻഡ് ചേർക്കുക.
- ഈ നിർദ്ദേശംclaw_motor.spin_for()കമാൻഡിന് മുമ്പായി പ്രത്യക്ഷപ്പെടുന്നത് ശ്രദ്ധിക്കുക. ക്ലോ മോട്ടോറിന് എത്ര സമയം പ്രവർത്തിക്കാൻ കഴിയുമെന്ന് സജ്ജീകരിക്കുകയും ആ സമയത്തിന് ശേഷം അത് നിർത്തുകയും ചെയ്യുക എന്നതാണ് ഇതിന്റെ ഉദ്ദേശ്യം. അതിനാൽ മോട്ടോർ 60 ഡിഗ്രി പൂർണ്ണമായി ചലിച്ചില്ലെങ്കിൽ പോലും, രണ്ട് സെക്കൻഡ് കഴിഞ്ഞാൽ പ്രോജക്റ്റ് ക്ലോ മോട്ടോർ നിർത്തുന്നു.
claw_motor.set_position(0, DEGREES)
claw_motor.set_timeout(2, SECONDS)
claw_motor.spin_for(REVERSE, 60, DEGREES)- മുകളിൽ കാണിച്ചിരിക്കുന്നതുപോലെ claw 60 ഡിഗ്രി തുറക്കാൻclaw_motor.spin_for()കമാൻഡ് എഴുതുക.

- V5 റോബോട്ട് ബ്രെയിനിൽ പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്യുന്ന സ്ലോട്ട് ബോക്സ് ചെയ്ത 1 ഐക്കൺ തിരഞ്ഞെടുത്ത് തിരഞ്ഞെടുക്കുക. ലഭ്യമായ എല്ലാ പ്രോജക്റ്റ് സ്ലോട്ടുകളും തുറക്കാനും ആവശ്യമുള്ള സ്ലോട്ട് തിരഞ്ഞെടുക്കാനും കഴിയും.
- റോബോട്ട് നിങ്ങളുടെ കമ്പ്യൂട്ടറിലേക്കോ ടാബ്ലെറ്റിലേക്കോ ബന്ധിപ്പിക്കുക. കണക്ഷൻ വിജയകരമായി പൂർത്തിയായാൽ ടൂൾബാറിലെ ബ്രെയിൻ ഐക്കൺപച്ചആയി മാറുന്നു.
- V5 റോബോട്ട് ബ്രെയിനിലേക്ക് പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്യുന്നതിന് ഉപകരണ വിവര ഐക്കണിന് അടുത്തുള്ള ഡൗൺലോഡ് ഐക്കണിൽ ക്ലിക്കുചെയ്യുക.

- നിങ്ങൾ തിരഞ്ഞെടുത്ത സ്ലോട്ടിൽ ClawControl പ്രോജക്റ്റ് തലച്ചോറിലേക്ക് ഡൗൺലോഡ് ചെയ്തിട്ടുണ്ടോയെന്ന് പരിശോധിക്കുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
മോഡൽ ആദ്യം
ടീച്ചർ ടൂൾബോക്സ്
-
മോഡൽ ആദ്യം
എല്ലാ വിദ്യാർത്ഥികളെയും ഒരുമിച്ച് പരീക്ഷിക്കുന്നതിന് മുമ്പ്, ക്ലാസ്സിന് മുന്നിൽ പ്രോജക്റ്റ് മാതൃകയായി നടപ്പിലാക്കുക. വിദ്യാർത്ഥികളെ ഒരു സ്ഥലത്ത് ഒരുമിച്ചുകൂട്ടി ക്ലോബോട്ടിന്റെ നഖം എല്ലാവർക്കും കാണാൻ കഴിയുന്ന തരത്തിൽ സ്ഥാപിക്കുക. ഒന്നിലധികം തവണ പ്രകടനം നടത്താൻ പദ്ധതിയിടുകയാണെങ്കിൽ, റൺസുകൾക്കിടയിൽ നിങ്ങൾക്ക് ക്ലാവ് സൌമ്യമായി അമർത്തിപ്പിടിക്കാം.
വിദ്യാർത്ഥികളോട് പറയുക, ഇനി അവരുടെ പ്രോജക്ടുകൾ നടത്താനുള്ള ഊഴമാണ്.
- പ്രോജക്റ്റ് തിരഞ്ഞെടുത്തുവെന്ന് ഉറപ്പാക്കി Clawbot-ൽ പ്രോജക്റ്റ്പ്രവർത്തിപ്പിക്കുക, തുടർന്ന് Run ബട്ടൺ അമർത്തുക. ക്ലാവ് മാറ്റുന്നതിനുള്ള നിങ്ങളുടെ ആദ്യ പ്രോജക്റ്റ് സൃഷ്ടിച്ചതിന് അഭിനന്ദനങ്ങൾ!
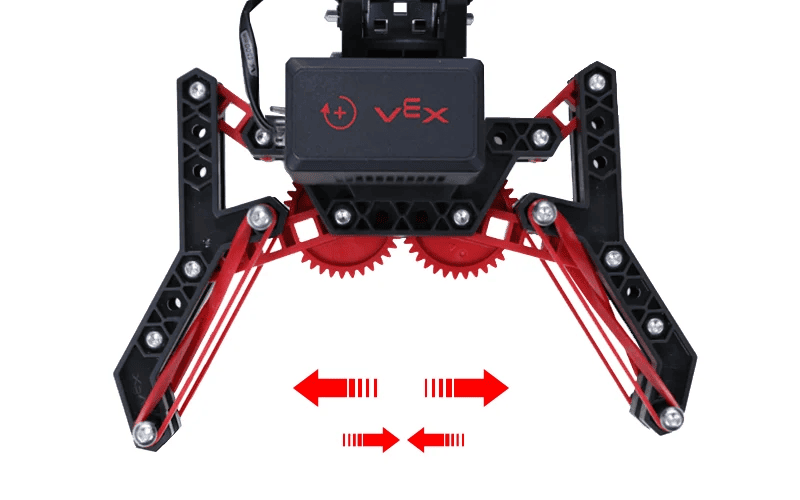
ഘട്ടം 4: ഇത് പരീക്ഷിച്ചുനോക്കൂ: V5 ക്ലോ അടയ്ക്കുക
ഇപ്പോൾ നിങ്ങൾ നഖം തുറക്കാൻ പ്രോഗ്രാം ചെയ്തു, ഇപ്പോൾ നിങ്ങൾ അത് അടയ്ക്കാൻ പ്രോഗ്രാം ചെയ്യും.
![]() ഇപ്പോൾ നിങ്ങൾക്ക് നഖം തുറക്കാൻ കഴിയും, നിങ്ങൾക്കും അത് അടയ്ക്കേണ്ടി വരും.
ഇപ്പോൾ നിങ്ങൾക്ക് നഖം തുറക്കാൻ കഴിയും, നിങ്ങൾക്കും അത് അടയ്ക്കേണ്ടി വരും.
- നിങ്ങളുടെ ClawControl പ്രോജക്റ്റിലേക്ക് തിരികെ പോയി Claw Motor സ്പിൻ 30 ഡിഗ്രി അടച്ചു വയ്ക്കാൻ ഒരു അധികclaw_motor.spin_for()കമാൻഡ്ചേർക്കുക. നഖം ആദ്യം 60 ഡിഗ്രി കോണിൽ തുറന്നിരുന്നതിനാൽ അത് പകുതി ദൂരം അടയ്ക്കണം.
- നിങ്ങളുടെ പരിഷ്കരിച്ച പ്രോജക്റ്റിന്റെ ക്ലാവ് 60 ഡിഗ്രി തുറന്ന് 30 ഡിഗ്രി അടച്ചിട്ടുണ്ടെന്ന് ClawControl പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്ത് പ്രവർത്തിപ്പിച്ച് പരിശോധിക്കുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
മുമ്പ്, ക്ലാവ് 60 ഡിഗ്രിയിലേക്ക് തുറന്നിരുന്നു. ആ പ്രോജക്റ്റിൽ മോട്ടോർ ടൈംഔട്ട് നിർദ്ദേശം ഉൾപ്പെടുത്തിയിരുന്നു, കാരണം ഒരു മാനിപ്പുലേറ്ററിന് പവർ നൽകുമ്പോൾ ഒരു ടൈംഔട്ട് സജ്ജീകരിക്കേണ്ടത് ഒരു പ്രധാന രീതിയാണ്, അത് ഏതെങ്കിലും വിധത്തിൽ അതിന്റെ ചലനത്തെ നിയന്ത്രിക്കും. ഒരു ടൈംഔട്ട് സജ്ജീകരിക്കുന്നത് മോട്ടോറിലെ അനാവശ്യമായ തേയ്മാനം തടയുന്നു.
ഈ ഘട്ടത്തിനുള്ള പരിഹാരം ഇപ്രകാരമാണ്:
# പ്രോജക്റ്റ് കോഡ് ആരംഭിക്കുക
claw_motor.set_position(0, DEGREES)
claw_motor.set_timeout(2, SECONDS)
claw_motor.spin_for(REVERSE, 60, DEGREES)
claw_motor.spin_for(FORWARD, 30, DEGREES)ഘട്ടം 5: ഇത് പരീക്ഷിച്ചുനോക്കൂ: ഒന്നിലധികം ചലനങ്ങൾ ക്രമപ്പെടുത്തൽ
![]() നഖം ഉപയോഗിച്ച് എടുക്കുന്നതെല്ലാം ഒരേ വലിപ്പത്തിലായിരിക്കണമെന്നില്ല. ചലന പരിധിയിൽ വ്യത്യസ്ത സ്ഥാനങ്ങളിലേക്ക് നഖം തുറക്കാൻ ശ്രമിക്കുക.
നഖം ഉപയോഗിച്ച് എടുക്കുന്നതെല്ലാം ഒരേ വലിപ്പത്തിലായിരിക്കണമെന്നില്ല. ചലന പരിധിയിൽ വ്യത്യസ്ത സ്ഥാനങ്ങളിലേക്ക് നഖം തുറക്കാൻ ശ്രമിക്കുക.
- മോട്ടോർ കറക്കാൻ, ഇനിപ്പറയുന്നവ ചെയ്യുക:
- 70 ഡിഗ്രിയിൽ തുറക്കുക
- 20 ഡിഗ്രിയിൽ അടയ്ക്കുക
- 10 ഡിഗ്രിയിൽ തുറക്കുക
- 30 ഡിഗ്രിയിൽ അടയ്ക്കുക
- 25 ഡിഗ്രിയിൽ അടയ്ക്കുക
- ക്ലോ മോട്ടോർ 0 ഡിഗ്രിയിൽ ആരംഭിക്കുകയാണെങ്കിൽ, പ്രോജക്റ്റിന്റെ അവസാനം ക്ലോ മോട്ടോർ എത്ര ഡിഗ്രി തുറന്നിരിക്കും?
- ക്ലോ മോട്ടോർ അടച്ചുവെച്ചുകൊണ്ട് ആരംഭിക്കുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
ഈ ഘട്ടത്തിനുള്ള പരിഹാരം താഴെ കൊടുത്തിരിക്കുന്നു.
പ്രോജക്റ്റിന്റെ അവസാനം ക്ലോ മോട്ടോർ 5 ഡിഗ്രിയിൽ ഇപ്പോഴും തുറന്നിരിക്കും: 70 - 20 = 50 --> 50 + 10 = 60 --> 60 - 30 = 30 --> 30 - 25 = 5 ഡിഗ്രി.
# പ്രോജക്റ്റ് കോഡ്
ആരംഭിക്കുക # ക്ലാവിന്റെ നിലവിലെ സ്ഥാനം പൂജ്യം
ആയി എടുക്കുക claw_motor.set_position(0, DEGREES)
# ക്ലാവിന്റെ സമയപരിധി സജ്ജമാക്കുക
claw_motor.set_timeout(2, SECONDS)
claw_motor.spin_for(REVERSE, 70, DEGREES)
claw_motor.spin_for(FORWARD, 20, DEGREES)
claw_motor.spin_for(REVERSE, 10, DEGREES)
claw_motor.spin_for(FORWARD, 30, DEGREES)
claw_motor.spin_for(FORWARD, 25, DEGREES)ഘട്ടം 6: ലോക്ക് ടൈറ്റ് ചലഞ്ച് പൂർത്തിയാക്കുന്നു

![]() ലോക്ക് ടൈറ്റ് ചലഞ്ച്
ലോക്ക് ടൈറ്റ് ചലഞ്ച്
- 12 ഔൺസ് ശൂന്യമായ ഒരു അലുമിനിയം ക്യാനിലെ വശങ്ങൾ തകർക്കാതെ ക്ലാവ് സുരക്ഷിതമായി അടയ്ക്കുന്നതിന് ക്ലോബോട്ട് പ്രോഗ്രാം ചെയ്യുക.
- 45 ഡിഗ്രിയിൽ കൈ ഉയർത്തുകയും താഴ്ത്തുകയും ചെയ്യുമ്പോൾ ക്ലോബോട്ട് ക്യാനിൽ പിടിക്കട്ടെ.
- പിന്നീട് ക്ലോബോട്ട് ക്യാൻ പുറത്തിറക്കി അതിൽ നിന്ന് പിന്നോട്ട് പോകണം.
- തുറന്ന നഖവും അതിനുള്ളിൽ ഒരു ഒഴിഞ്ഞ ക്യാനും ഉപയോഗിച്ച് വെല്ലുവിളി ആരംഭിക്കുക.
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
- തുറന്ന നഖവും അതിനുള്ളിൽ ഒരു ഒഴിഞ്ഞ ടിന്നും ഉപയോഗിച്ച് വിദ്യാർത്ഥികൾ വെല്ലുവിളി ആരംഭിക്കട്ടെ.
- ക്യാൻ തകരുകയോ നഖത്തിൽ നിന്ന് വീഴുകയോ ചെയ്താൽ, പ്രോജക്റ്റ് ക്രമീകരിച്ചതിനുശേഷം വെല്ലുവിളി പുനരാരംഭിക്കണം.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
ഒരു ഉദാഹരണ പരിഹാരം ഇതാ:
# പ്രോജക്റ്റ് കോഡ്
ആരംഭിക്കുക # ക്ലാവിന്റെ നിലവിലെ സ്ഥാനം പൂജ്യം
ആയി എടുക്കുക claw_motor.set_position(0, DEGREES)
# ക്ലാവിന്റെ സമയപരിധി സജ്ജമാക്കുക
claw_motor.set_timeout(2, SECONDS)
claw_motor.spin_for(FORWARD, 170, DEGREES)
arm_motor.spin_for(FORWARD, 45, DEGREES)
arm_motor.spin_for(REVERSE, 45, DEGREES)
claw_motor.spin_for(REVERSE, 150, DEGREES)
drivetrain.drive_for(REVERSE, 150, MM)- പ്രോജക്റ്റ് സമയപരിധി നിശ്ചയിക്കുന്നു, ക്യാനിനു ചുറ്റുമുള്ള നഖം അടയ്ക്കുന്നു, ക്യാൻ ഉയർത്തുകയും താഴ്ത്തുകയും ചെയ്യുന്നു, അത് വിടുന്നു, തുടർന്ന് പിന്നോട്ട് പോകുന്നു.
-
പ്രോഗ്രാമിംഗ് റൂബ്രിക്