
เล่น
ส่วนที่ 1 - ทีละขั้นตอน
- สั่งสอนสั่งนักเรียนว่าพวกเขากำลังจะถูกท้าทายให้สร้างโครงการเพื่อให้หุ่นยนต์ 123
ตรวจจับสิ่งกีดขวางทั้งหมดในพื้นที่ลงจอดบนดาวอังคาร
พวกเขาจะได้รับการสนับสนุนให้สร้างโครงการของพวกเขาจากห้องปฏิบัติการ 1
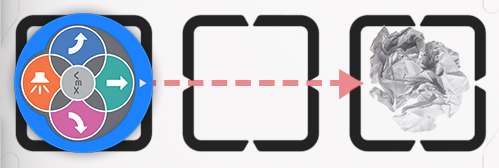
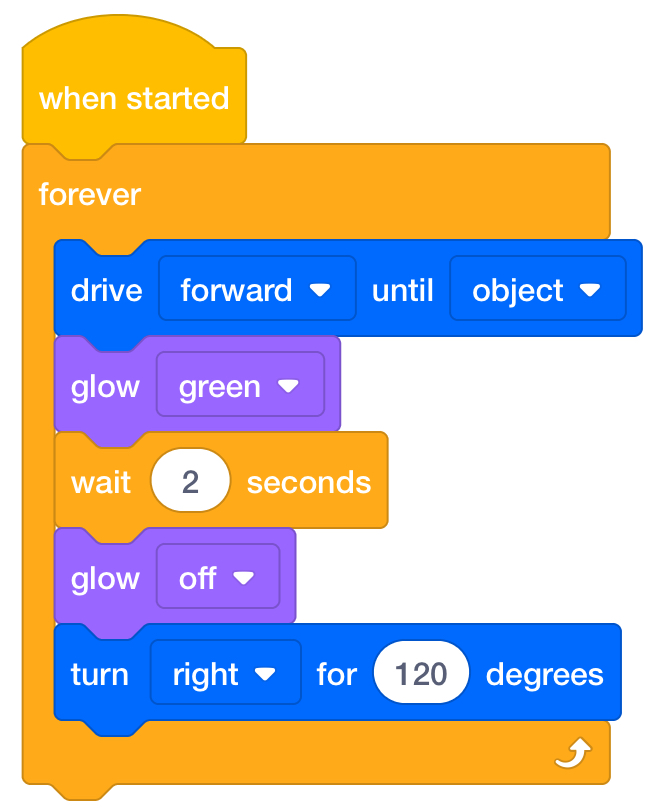
แอนิเมชั่นต่อไปนี้แสดงวิธีหนึ่งที่เป็นไปได้ว่าหุ่นยนต์ 123 ตัวสามารถเข้ารหัสสำหรับการล้างพื้นที่ท้าทายลงจอดได้ คุณจะสังเกตเห็นว่าหุ่นยนต์ 123 ไม่ได้ล้างสิ่งกีดขวางทุกอย่างบนพื้นที่ลงจอด โครงการนี้จะได้รับการแก้ไขเพื่อให้หุ่นยนต์สำรวจ 123 สามารถเคลียร์พื้นที่ลงจอดทั้งหมดได้อย่างไร?ไฟล์วิดีโอ - แบบอย่างโมเดลโมเดลสำหรับนักเรียนในการสร้างและทดสอบโครงการใน VEXcode 123
- ให้นักเรียนเพิ่มบล็อกและเปลี่ยน พารามิเตอร์ตามที่ได้เรียนรู้ในห้องปฏิบัติการอื่นๆเพื่อให้หุ่นยนต์ 123 กำจัดอุปสรรคทั้งหมดในภาคสนาม
- ให้นักเรียนเปลี่ยนชื่อโปรเจกต์เป็น Clear Area และบันทึกลงในอุปกรณ์ ดูส่วนเปิดและบันทึกของไลบรารี VEXcode 123 VEX สำหรับขั้นตอนเฉพาะของอุปกรณ์เพื่อบันทึกโครงการ VEXcode123
- หากจำเป็นให้แบบจำลองสำหรับนักเรียนในการทดสอบโครงการของพวกเขาในภาคสนาม
-
แสดงวิธีวางหุ่นยนต์ 123 ตัวบนจุดเริ่มต้นที่มีเครื่องหมาย "X"
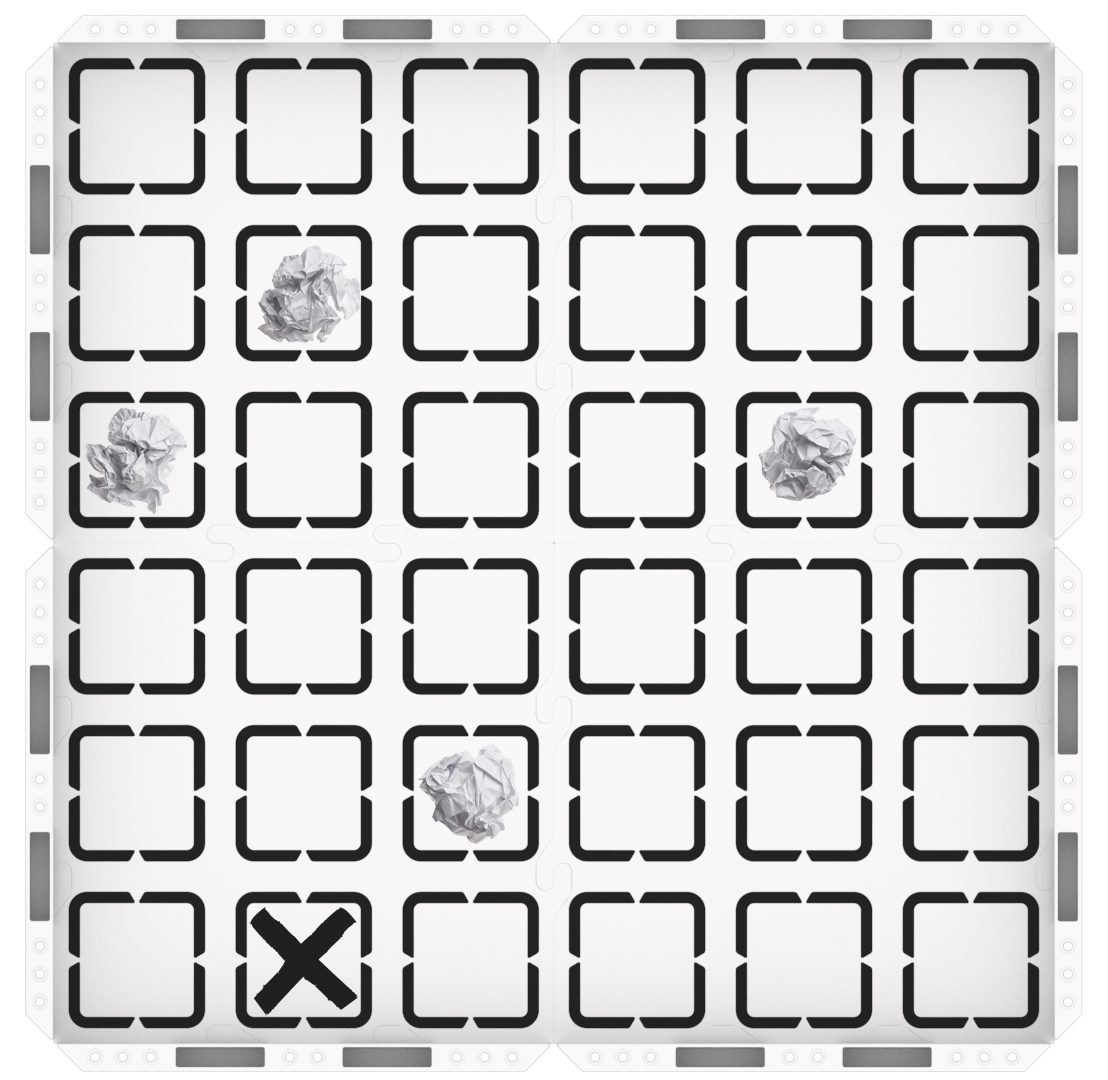
123 การตั้งค่าฟิลด์ -
ตรวจสอบให้แน่ใจว่าเซ็นเซอร์ตรวจจับดวงตาที่อยู่ด้านหน้าของหุ่นยนต์หันหน้าไปทางสิ่งกีดขวางแรก
 เซนเซอร์ตรวจจับ
เซนเซอร์ตรวจจับสายตาหันหน้าเข้าหาวัตถุ -
วางหุ่นยนต์ 123 ตัวลงบนสนามและเลือก ‘เริ่ม’ ใน VEXcode 123 เพื่อทดสอบโครงการของพวกเขา
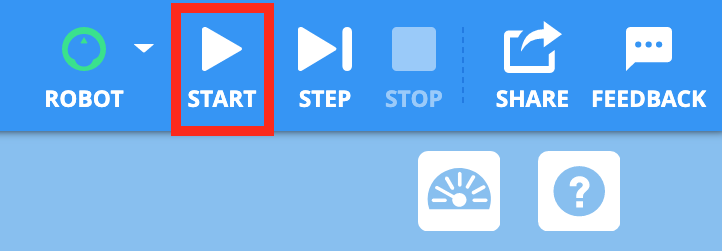
เลือก "เริ่ม" เพื่อทดสอบโครงการ - เตือนนักเรียนว่าพวกเขาจะต้องกำจัดสิ่งกีดขวางหลังจากตรวจพบโดยหุ่นยนต์ 123 ตัว
-
นักเรียนจะต้องเลือกปุ่ม "หยุด" ในแถบเครื่องมือเพื่อหยุดหุ่นยนต์ 123 ตัว สั่งให้นักเรียนหยุดโครงการเมื่อหุ่นยนต์ 123 ตัวตรวจพบสิ่ง กีดขวางทั้งหมดวนซ้ำสี่ รอบโดยไม่ตรวจพบสิ่งกีดขวางหรือติดอยู่ที่ขอบสนาม
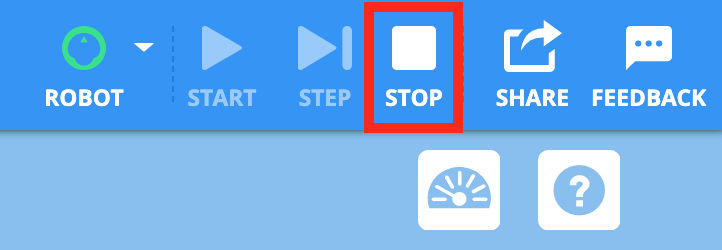
เลือก "หยุด"
-
- สำหรับกลุ่มที่จบเร็วและต้องการความท้าทายเพิ่มเติมให้พวกเขาทดลองกับจุดเริ่มต้นที่แตกต่างกัน โปรเจกต์ของพวกเขายังใช้งานได้อยู่
- อำนวยความสะดวกอำนวยความสะดวกในการสนทนากับนักเรียนขณะที่พวกเขาทดลองกับโครงการของพวกเขา
- เตรียมนักเรียนให้พร้อมสำหรับการทดลองและข้อผิดพลาดที่เป็น ส่วนหนึ่งภายในของการทดลองที่พวกเขาจะมีส่วนร่วมกับความท้าทายนี้ ท่านอาจต้องการใช้ภาพกราฟิกวงจรการแก้ปัญหาจากหน้าพื้นหลังเป็นภาพช่วยใน การสร้างโครงสร้างสำหรับกระบวนการแก้ปัญหาร่วมกับนักเรียนของท่าน
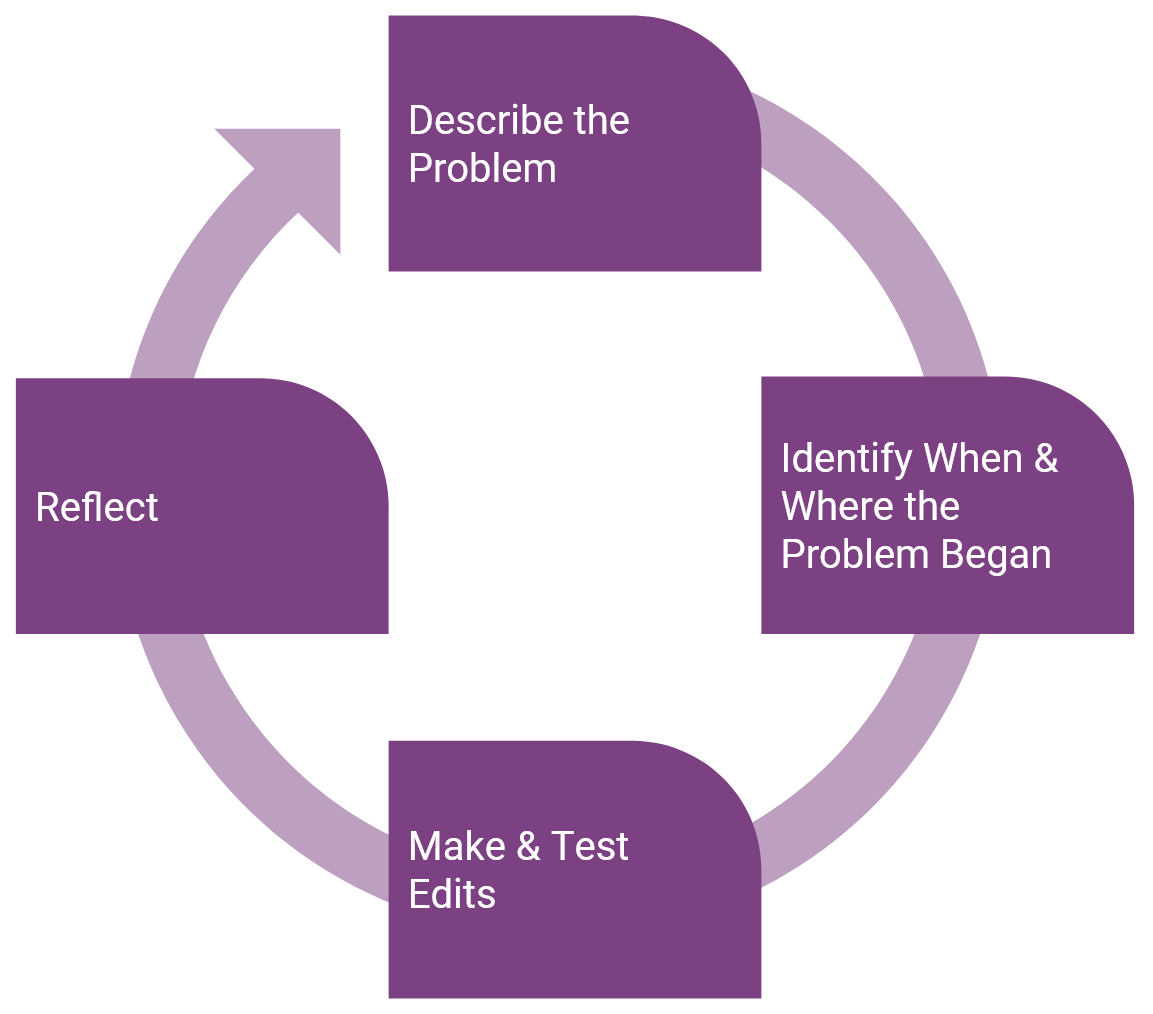 วงจรการแก้ปัญหาของ
วงจรการแก้ปัญหาของนักเรียน - หากนักเรียนใช้ลูปในโครงการด้วยบล็อค [Forever] หรือบล็อค [Repeat] แต่หุ่นยนต์ 123
ตัวไม่เคลื่อนไหวตามที่ตั้งใจไว้พวกเขาอาจไม่มีบล็อกที่จำเป็นทั้งหมดภายในลูปหรืออาจจัดลำดับบล็อกภายในลูปในลักษณะที่ทำให้หุ่นยนต์
123 ตัวเคลื่อนไหวในลักษณะที่ไม่ได้ตั้งใจ
- ใช้ฟีเจอร์ Project Stepping เพื่อช่วยให้นักเรียนผ่านโปรเจกต์ไปทีละช่วงตึกเพื่อดูว่าแต่ละช่วงตึกถูกดำเนินการอย่างไรในโปรเจกต์ของพวกเขา สิ่งนี้จะช่วยให้นักเรียนเห็นว่าลูปทำงานอย่างไรในโครงการของพวกเขาและจะให้ข้อเสนอแนะ ด้วยภาพเพื่อแสดงว่าบล็อก ใดที่อาจเป็นสาเหตุของข้อผิดพลาดดังนั้นการดีบักอาจกลายเป็นกระบวนการที่ตรงเป้าหมายและมีประสิทธิภาพมากขึ้น สำหรับข้อมูลเพิ่มเติมเกี่ยวกับวิธีการใช้คุณลักษณะ Project Stepping โปรดดูที่ Stepping Through a Project ใน VEXcode 123 vex LibraryArticle
-
เตือนนักเรียนว่าพวกเขายังสามารถใช้ฟีเจอร์ไฮไลต์เพื่อดูว่าบล็อกใดกำลังดำเนินการอยู่และเมื่อใดที่พวกเขาดำเนินโครงการของพวกเขา
คำถามต่อไปนี้สามารถใช้เพื่อกระตุ้นให้นักเรียนระบุว่าลูปมีผลต่อการไหลของโครงการด้วยฟีเจอร์ไฮไลต์อย่างไร
- ไฮไลต์จะเคลื่อนไหวอย่างไรเมื่อมีลูปในโปรเจกต์ของเรา?
- บล็อก VEXcode 123 ใดที่สร้างลูปได้?
- บล็อกใดถูกทำซ้ำในโปรเจกต์ของคุณ?
- หากหุ่นยนต์ 123 ไม่หมุนนักเรียนอาจไม่ได้ เพิ่มบล็อค [Turn for] แสดงให้นักเรียนเห็นวิธี
เพิ่มบล็อค [Turn for] เพื่อให้หุ่นยนต์ 123
ตัวเปลี่ยนทิศทางหลังจากตรวจพบสิ่งกีดขวางมิฉะนั้นหุ่นยนต์ 123 ตัวจะขับไปข้างหน้าและหยุด
เนื่องจากนักเรียนอาจไม่คุ้นเคยกับมุมท่านอาจต้องการให้มุมหลายๆมุมแก่พวกเขาเพื่อทดลองเช่น 60, 90,
120 องศา
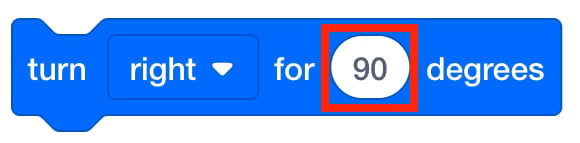
- เตือนพวกเขาว่าพวกเขาสามารถเปลี่ยนมุมเลี้ยวในรูปไข่อินพุตในบล็อก [Turn for] หากทำการทดลองกับมุมเลี้ยวให้ถามนักเรียนว่าการเปลี่ยนแปลงพารามิเตอร์นี้มีผลต่อการเคลื่อนที่ของหุ่นยนต์ 123 อย่างไร จะเกิดอะไรขึ้นหากเราเพิ่มมุมเลี้ยว? มันเปลี่ยนการเคลื่อนไหวของ 123 Robot rover อย่างไร? การเปลี่ยนแปลงนี้มีหุ่นยนต์สำรวจ 123 ตัวตรวจจับสิ่งกีดขวางได้มากขึ้นหรือไม่? หากไม่มีให้ลองเปลี่ยนมุมเลี้ยว
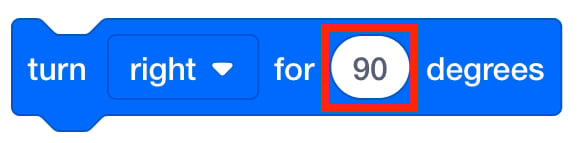
เปลี่ยนมุมเลี้ยวในบล็อค [Turn for] -
เตือนเตือนนักเรียนว่าความท้าทายนี้ต้องมีการสำรวจอย่างสนุกสนานและจะมี วงจรของการลองผิดลองถูก
พวกเขาจะทำผิดพลาดในโครงการของพวกเขาในขณะที่พวกเขาทดลองและทุกครั้งที่พวกเขาทำผิดพลาดในรหัสของพวกเขาพวกเขา มีโอกาสที่จะเรียนรู้สิ่งใหม่ๆ!
ช่วยนักเรียนระบุว่าในรหัสมีปัญหาที่ใดและหยอกล้อแนวคิดในการแก้ไขปัญหา
- มีอะไรผิดปกติหรือเปล่า? เยี่ยมไปเลย! ปัญหาอยู่ตรงไหนของรหัส? คุณ จะเปลี่ยนบล็อคนั้นได้อย่างไร?
- คุณต้องการบล็อกอื่นหรือคุณต้องการเปลี่ยนพารามิเตอร์ในบล็อกนี้?
-
อะไรคือความผิดพลาดที่คุณ ชื่นชอบจนถึงตอนนี้? ท่านเรียนรู้อะไรจากมัน?
- ถามถามนักเรียนว่าพวกเขาคิดว่ายานสำรวจดาวอังคารตัวจริงจะใช้ลูปและเซ็นเซอร์ตรวจจับสิ่งกีดขวางบนพื้นดินก่อนลงจอดได้อย่างไร
การสนทนา & กลุ่มช่วงพักระหว่างเล่น
ทันทีที่ทุกกลุ่ม ได้ทดลองโครงการของพวกเขาเพื่อแก้ปัญหาให้มารวมตัวกันเพื่อสนทนา สั้นๆ
ขอให้นักเรียนแสดงโครงการของพวกเขาและอธิบายว่าหุ่นยนต์ 123 กำลังทำอะไรอยู่ นี่เป็นโอกาสที่จะตรวจสอบความคืบหน้าและการแก้ไขปัญหาของนักเรียน
- โปรเจกต์ของคุณทำอะไรได้ดีบ้าง?
- โปรเจกต์ของคุณต้องเผชิญกับความท้าทายอะไรบ้าง?
ตรวจสอบให้แน่ใจว่านักเรียนเข้าใจว่าพวกเขาสามารถใช้ห่วงเพื่อให้หุ่นยนต์ 123 ตรวจสอบสิ่งกีดขวางบนสนามซ้ำๆได้
- พวกเขาได้ใช้ห่วงเพื่อให้หุ่นยนต์ 123 ตรวจจับวัตถุหลายชิ้นหรือไม่? หากไม่ใช่ให้เตือนนักเรียนเกี่ยวกับบล็อก [Forever] และ [Repeat] ที่ท่านพูดถึง ในส่วนการมีส่วนร่วม
- หากพวกเขาใช้ห่วงพวกเขาใช้มันอย่างไร? บล็อกใดที่พวกเขาใช้เพื่อสร้างลูปในโปรเจกต์ของพวกเขา?
- ลำดับของบล็อกในลูปส่งผลกระทบต่อพฤติกรรมของหุ่นยนต์สำรวจ 123 อย่างไร?
- จะเกิดอะไรขึ้นหากบล็อกบางส่วนไม่อยู่ในลูป [Forever] หรือ [Repeat]? บล็อกเหล่านั้นจะถูกทำซ้ำหรือไม่?
เตรียมพร้อมสำหรับการเปลี่ยนแปลงความท้าทายในการเล่นตอนที่ 2:
- จะเกิดอะไรขึ้นหากเราเปลี่ยนตำแหน่งของสิ่งกีดขวาง? โปรเจกต์นี้จะยังใช้งานได้หรือไม่ เหตุใดจึงรู้สึกเช่นนั้น?
ส่วนที่ 2 - ทีละขั้นตอน
-
สั่งสอนสั่งให้นักเรียนย้ายสิ่งกีดขวางบนพื้นที่ลงจอดบนดาวอังคารและทำการทดลองกับโครงการของพวกเขาต่อไป
เป้าหมายคือการให้หุ่นยนต์ 123 ตัวตรวจจับสิ่งกีดขวางทั้งหมดในสนามแม้ว่าตำแหน่งของพวกเขาจะเปลี่ยนไปก็ตาม!
พวกเขาจะใช้สิ่งที่ได้เรียนรู้เกี่ยวกับลูปและบล็อค [Repeat] หรือ [Forever] เพื่ออัปเดตโปรเจกต์ของพวกเขา
ดูภาพเคลื่อนไหวด้านล่างเพื่อดูตัวอย่างหนึ่งของวิธีที่หุ่นยนต์ 123
ตัวอาจทำสิ่งท้าทายนี้ให้สำเร็จและกำจัดอุปสรรคทุกอย่างโดยใช้บล็อก Forever
ไฟล์วิดีโอ
- โปรดทราบว่าแอนิเมชันจะหยุดลงหลังจากตรวจพบและลบวัตถุทั้งหมดแล้วแต่ลูป [Forever] จะทำให้หุ่นยนต์ 123 ทำงานตลอดไปในลูปนั้นจนกว่าโปรเจกต์จะหยุดลง
- โมเดลโมเดลสำหรับนักเรียนในการตั้งค่าฟิลด์และทดสอบโครงการของพวกเขา
-
ก่อนอื่นให้พวกเขาแสดง วิธีวางสิ่งกีดขวางในสถานที่ใหม่บนสนามและ เลือกจุดเริ่มต้นและทำเครื่องหมายด้วย “X”
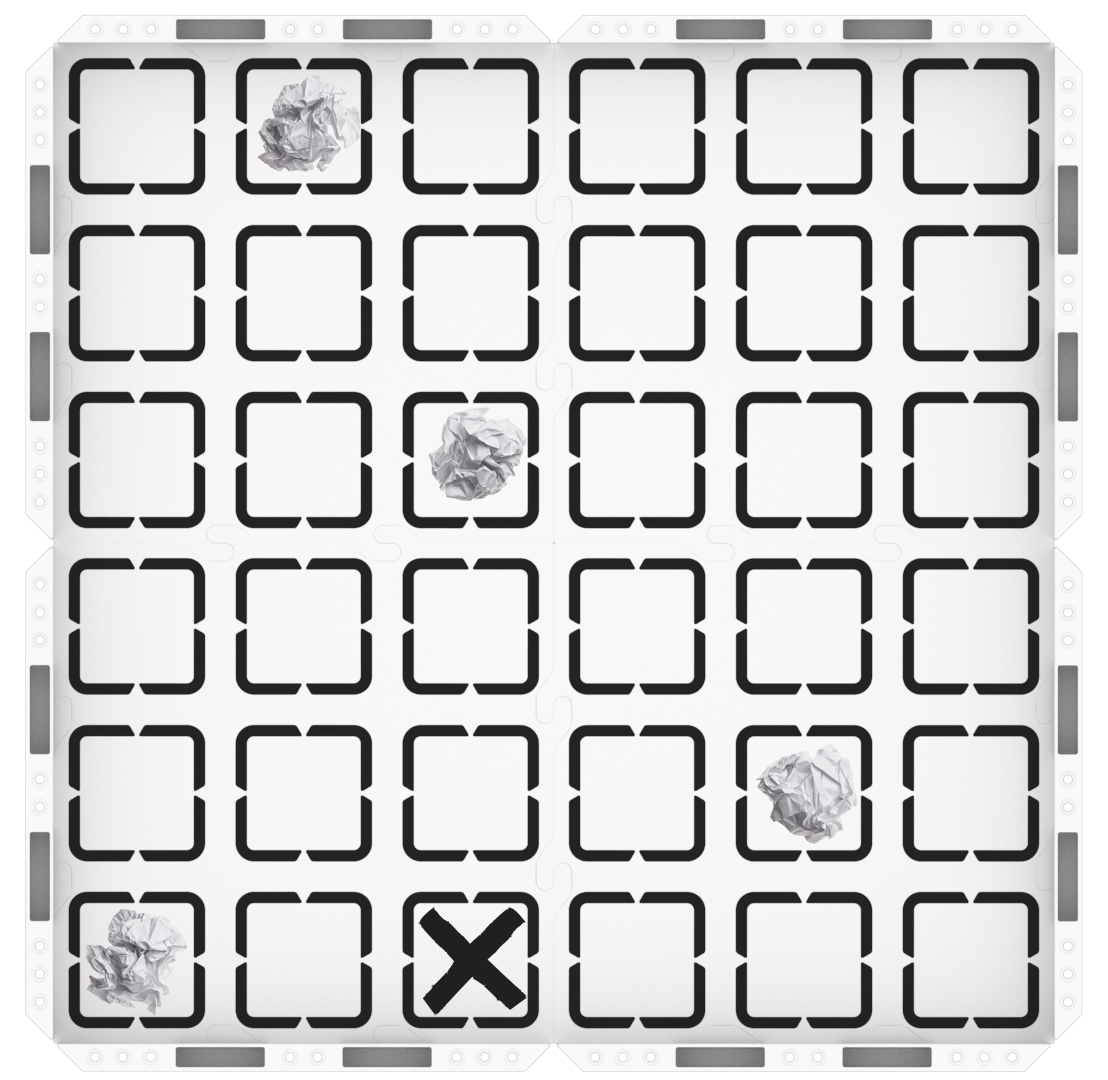
123 การตั้งค่าฟิลด์ -
เมื่อมีสิ่งกีดขวางและหุ่นยนต์ 123 ตัวแล้วพวกเขาสามารถเลือก ‘เริ่ม’ ใน VEXcode 123 เพื่อทดสอบโครงการของพวกเขา
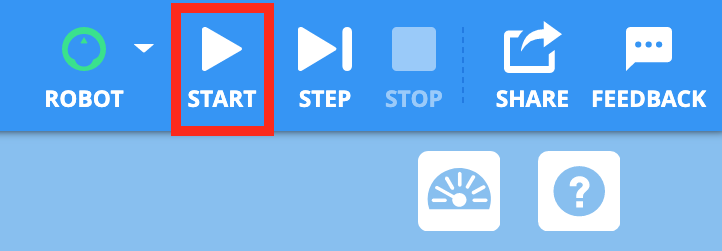
เลือก ‘เริ่ม’ เพื่อทดสอบโครงการ - เตือนนักเรียนว่าพวกเขา จะต้องเลือกปุ่ม “หยุด” ในแถบเครื่องมือเพื่อหยุดหุ่นยนต์ 123 ตัว
- มีทางออกที่เป็นไปได้มากมายสำหรับความท้าทายนี้ ต่อไปนี้เป็นตัวอย่างหนึ่งสำหรับการอ้างอิง
 วิธีแก้ปัญหา
วิธีแก้ปัญหาที่เป็นไปได้ -
-
- อำนวยความสะดวกอำนวยความสะดวกในการสนทนากับนักเรียนขณะทดสอบโครงการของพวกเขา
- หากนักเรียนต้องการความช่วยเหลือในการ ทำรหัสซ้ำ 123 Robot เพื่อตรวจหาอุปสรรคทั้งหมดในสนามแนะนำให้ใช้บล็อก [ทำซ้ำ] หรือบล็อก [ตลอดไป] ตามที่ท่านพูดถึงในส่วนการมีส่วนร่วม และแสดงวิธีใช้ในโครงการของพวกเขา กระตุ้นให้พวกเขาตรวจสอบให้แน่ใจว่าโครงการทั้งหมดอยู่ใน C-block ดังที่แสดงด้านล่าง
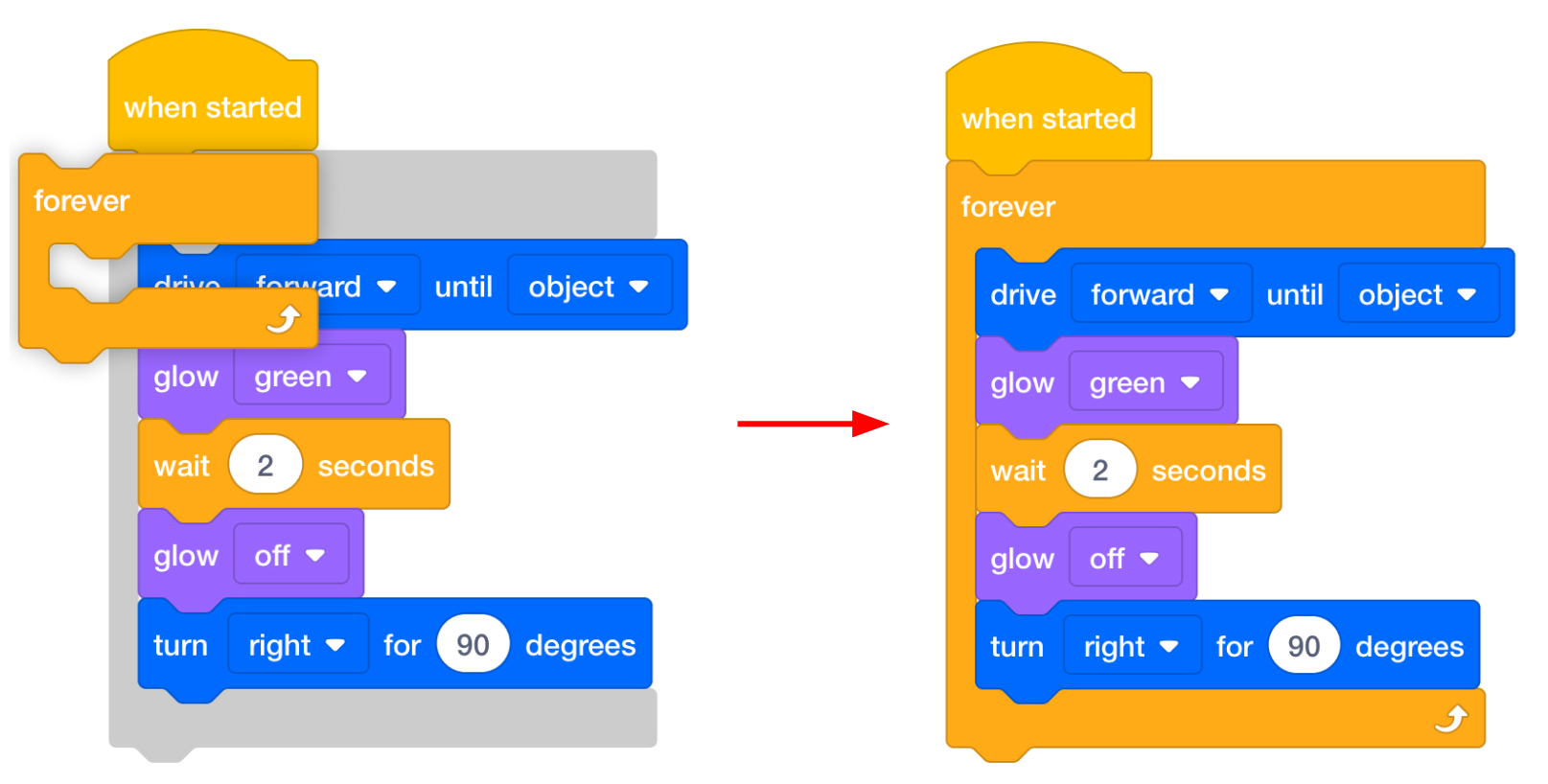
เพิ่มบล็อค [Forever] - หากนักเรียนสร้างโครงการแต่ไม่ได้ตรวจจับวัตถุทั้งหมดกระตุ้นให้พวกเขาทดลองมุมเลี้ยวให้มุมเลี้ยวต่อไปนี้เพื่อทดลองเช่น 60, 90 และ 120 องศา มุมเลี้ยวมีผลต่อการเคลื่อนที่ของหุ่นยนต์ 123 อย่างไร?
การเปลี่ยนมุมเลี้ยว ให้นักเรียนมีส่วนร่วมในการอภิปรายเพิ่มเติมขณะที่พวกเขาสร้างโครงการของพวกเขาเพื่อให้พวกเขาแบ่งปันความคิดของพวกเขาขณะที่พวกเขาทำซ้ำและทดสอบโครงการของพวกเขา
- สิ่งกีดขวางใดที่หุ่นยนต์ 123 ตรวจจับได้ก่อนในโครงการของคุณ?
- หุ่นยนต์ 123 ทำอะไรหลังจากตรวจพบสิ่งกีดขวาง? บล็อกใดที่คุณใช้ในการทำให้มันทำเช่นนี้?
- คุณเคยใช้บล็อกใดในการให้หุ่นยนต์ 123 เคลื่อนที่ไปยังสิ่งกีดขวางถัดไปหลังจากผ่านบล็อกหนึ่งแล้ว?
- โครงการ ของคุณมีหุ่นยนต์ 123 ตัวเพื่อเคลียร์พื้นที่ทั้งหมดได้อย่างไร?
- เตือนเตือนให้นักเรียนเริ่มจากจุดเดียวกันสำหรับการทดสอบ
พวกเขาแค่ต้องการเปลี่ยนตัวแปรหนึ่ง — ตำแหน่งของอุปสรรค
-
นอกจากนี้เตือนให้นักเรียนเริ่มต้นด้วยเซ็นเซอร์ตรวจจับดวงตาบนหุ่นยนต์ 123 ที่เผชิญกับอุปสรรคแรกสิ่งนี้จะทำให้หุ่นยนต์ 123 เดินทางไปยังอุปสรรคแรกได้อย่างรวดเร็วและจะช่วยให้นักเรียนประสบความสำเร็จในทันทีกับโครงการของพวกเขา
 เซนเซอร์ตรวจจับ
เซนเซอร์ตรวจจับดวงตาหันหน้าไป
-
- ขอให้นักเรีขอให้นักเรียนคิดว่าโครงการของพวกเขามีการเปลี่ยนแปลงอย่างไรตลอดความท้าทาย
- โครงการของคุณมีการเปลี่ยนแปลงอย่างไรตั้งแต่เริ่มต้นห้องปฏิบัติการจนถึงปัจจุบัน?
- คุณเปลี่ยนแปลงอะไรในโปรเจกต์เพื่อให้โปรเจกต์ทำงานได้ดีขึ้น?
- คุณเปลี่ยนแปลงอะไรที่ทำให้ประสบความสำเร็จน้อยลง? คุณแก้ไขอย่างไร?