
재생
1부 - 단계별
- 학생들에게 123 로봇이 화성 착륙 지역의 모든 장애물을 감지하도록 프로젝트를 만드는 데 어려움을 겪을 것이라고 지시하십시오. 그들은 실험실 1에서 자신의 프로젝트에 구축하도록 권장됩니다.
다음 애니메이션은 착륙 지우기 영역 챌린지를 위해 123 로봇을 코딩할 수 있는 한 가지 방법을 보여줍니다. 123 로봇이 착륙 구역의 모든 장애물을 지우지 않는다는 것을 알 수 있습니다. 123 로봇 로버가 착륙 구역 전체를 청소하도록 프로젝트를 어떻게 수정할 수 있습니까?동영상 파일 - 학생들을 위한 모델 모델 VEXcode 123에서 프로젝트를 빌드하고 테스트하는 방법.
- 학생들이 다른 실험실에서 배운 것처럼 블록을 추가하고 매개변수를 변경하여 123 로봇이 필드의 모든 장애물을 제거하도록 합니다.
- 학생들에게 프로젝트 이름을 Clear Area로 변경하고 기기에 저장하게 한다. VEXcode 123 프로젝트를 저장하는 장치별 단계는 VEXcode 123 VEX 라이브러리의 열기 및 저장 섹션을 참조하십시오.
- 필요한 경우, 학생들이 현장에서 프로젝트를 테스트하는 방법을 모델링합니다.
-
"X" 로 표시된 시작 지점에 123 로봇을 배치하는 방법을 보여줍니다.
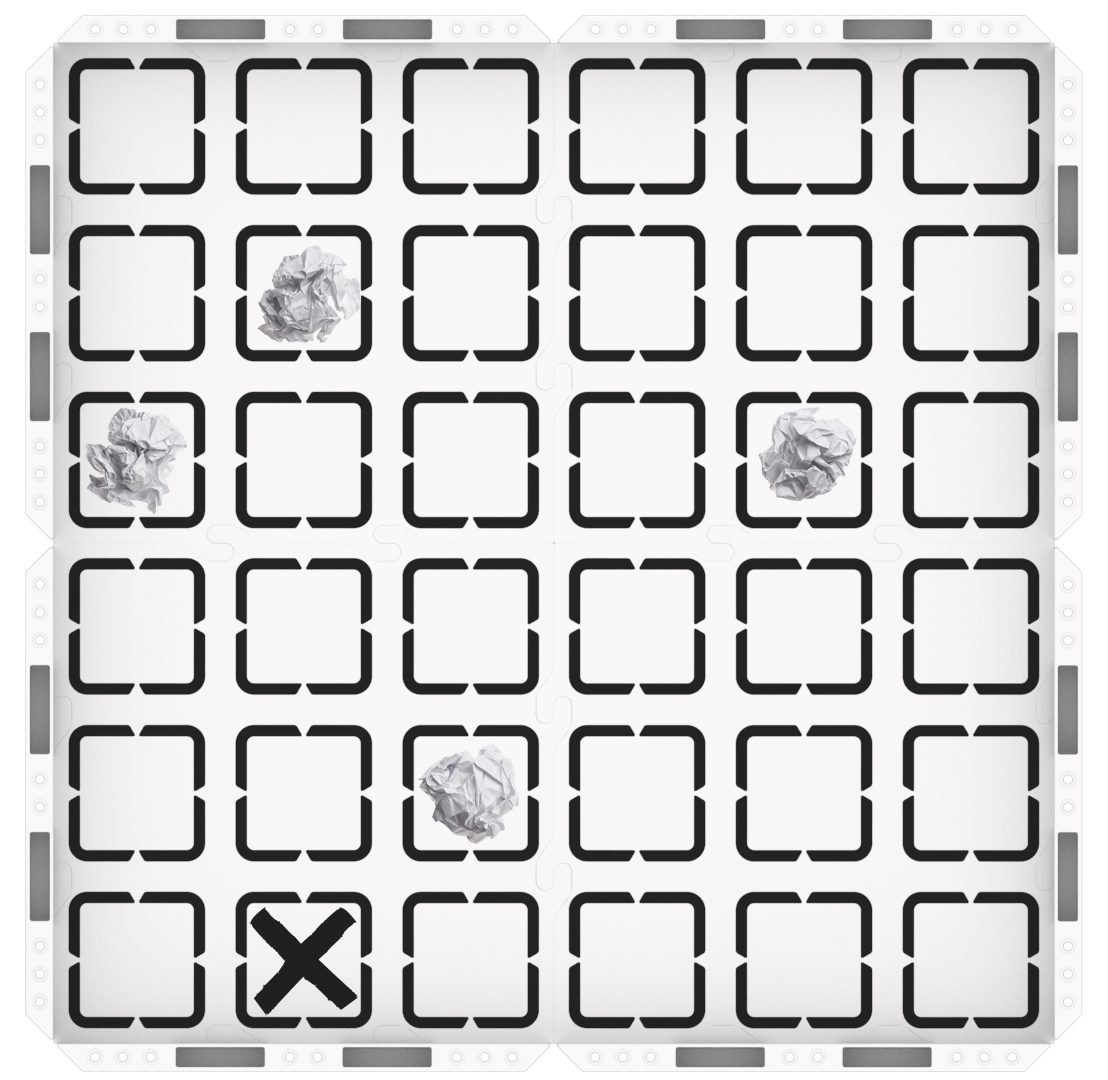
123 필드 설정 -
로봇 전면에 있는 눈 센서가 첫 번째 장애물을 향하고 있는지 확인하십시오.
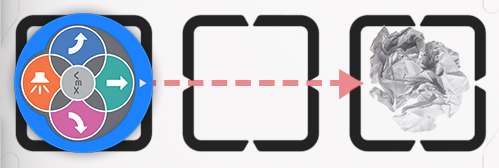
눈 센서 면 개체) -
123 로봇을 필드에 놓고 VEXcode 123에서 ‘시작’ 을 선택하여 프로젝트를 테스트합니다.
 '시작' 을
'시작' 을 선택하여 프로젝트를 테스트합니다. - 학생들에게 123 로봇에 의해 감지된 장애물을 제거해야 함을 상기시킨다.
-
학생들은 123 로봇을 중지하려면 도구 모음에서 "중지" 버튼을 선택해야 합니다. 123 로봇이 모든 장애물을 감지하거나, 장애물을 감지하지 않고 루프를 네 번 반복하거나, 필드 가장자리에 막히면 프로젝트를 중지하도록 학생들에게 지시하십시오.
 '중지'
'중지' 를 선택합니다.
-
- 일찍 끝내고 추가적인 도전이 필요한 그룹의 경우, 다른 시작점으로 실험하도록 합니다. 프로젝트가 계속 진행되나요?
- 퍼실리테이트 학생들이 프로젝트를 실험할 때 학생들과의 대화를 촉진한다.
- 학생들이 이 도전에 참여할 실험의 본질적인 부분인 시행착오에 대비한다. 배경 페이지의 문제 해결 주기 그래픽을 시각적 보조 도구로 사용하여 학생들과 함께 문제 해결 프로세스를 위한 구조를 수립할 수 있습니다.

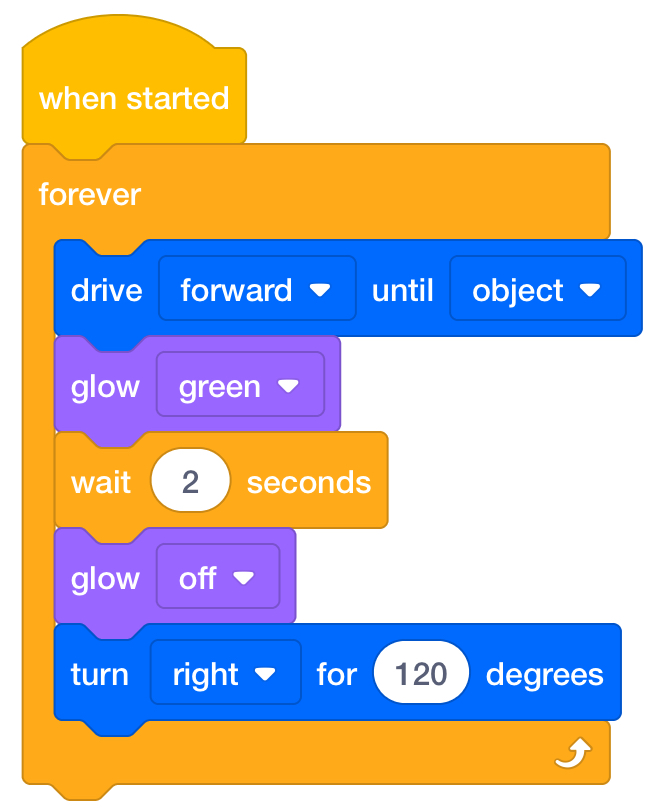
학생 문제 해결 주기 - 학생들이 프로젝트에서 [Forever] 블록 또는 [Repeat] 블록과 함께 루프를 사용하고 있지만 123 로봇이 의도한 대로 움직이지 않는 경우 루프 내부에 필요한 모든 블록이 없거나 123 로봇이 의도하지 않은 방식으로 움직이는 방식으로 루프 내부의 블록을 시퀀싱할 수 있습니다.
- 프로젝트 스테핑 기능을 사용하여 학생들이 한 번에 한 블록씩 프로젝트를 진행하여 각 블록이 프로젝트에서 어떻게 실행되고 있는지 확인할 수 있습니다. 이를 통해 학생들은 프로젝트에서 루프가 어떻게 작동하는지 확인하고 시각적 피드백을 제공하여 오류를 일으킬 수 있는 블록을 보여줄 수 있으므로 디버깅이보다 대상이되고 효율적인 프로세스가 될 수 있습니다. 프로젝트 스테핑 기능을 사용하는 방법에 대한 자세한 내용은 VEXcode 123 VEX 라이브러리 문서의 프로젝트 스테핑 을 참조하십시오.
- 학생들에게 하이라이트 기능을 사용하여 어떤 블록이 실행되고 있는지, 언제 프로젝트를 실행하는지 확인할 수 있음을 상기시킨다. 다음 질문은 학생들이 하이라이트 기능을 사용하여 루프가 프로젝트 흐름에 어떤 영향을 미치는지 파악하도록 장려하는 데 사용할 수 있습니다.
- 프로젝트에 루프가 있을 때 하이라이트는 어떻게 이동합니까?
- 어떤 VEXcode 123 블록이 루프를 생성합니까?
- 프로젝트에서 어떤 블록이 반복됩니까?
- 123 로봇이 회전하지 않는 경우, 학생들은 [Turn for] 블록을 추가하지 않았을 수 있습니다. 학생들에게 [Turn for] 블록을 추가하여 123 로봇이 장애물을 감지한 후 방향을 변경하는 방법을 보여줍니다. 그렇지 않으면 123 로봇이 앞으로 운전하고 정지합니다. 학생들이 각도에 익숙하지 않을 수 있으므로 60도, 90도, 120도 등 여러 각도를 제공하여 실험할 수 있습니다.
- [Turn for] 블록의 입력 타원형에서 회전 각도를 변경할 수 있음을 상기시킵니다. 회전 각도를 실험하는 경우, 이 매개 변수를 변경하면 123 로봇의 움직임에 어떤 영향을 미치는지 학생들에게 물어보십시오. 회전 각도를 높이면 어떻게 될까요? 123 로봇 로버의 움직임을 어떻게 변화 시키나요? 이 변경으로 123 로봇 로버가 더 많은 장애물을 감지할 수 있습니까? 그렇지 않은 경우 다른 회전 각도를 시도하십시오.
 [Turn for] 블록에서 회전 각도
[Turn for] 블록에서 회전 각도 변경 - 학생들에게 이 과제는 즐거운 탐구가 필요하며 시행착오의 주기가 있을 것임을 상기시킨다. 그들은 실험하면서 프로젝트에서 실수를 할 것이고, 코드에서 실수를 할 때마다 새로운 것을 배울 기회가 있습니다! 학생들이 코드에서 문제가 있는 곳을 식별하고 문제를 해결하기 위한 아이디어를 내도록 돕는다.
- 문제가 있었나요? 좋습니다! 코드의 어디에 문제가 있습니까? 해당 블록을 어떻게 변경할 수 있나요?
- 다른 블록이 필요하십니까? 아니면 이 블록의 매개변수를 변경해야 합니까?
-
지금까지 가장 마음에 들었던 실수는 무엇인가요? 이를 통해 무엇을 배웠는가?
- 학생들에게 실제 화성 탐사선이 착륙하기 전에 어떻게 루프와 눈 센서를 사용하여 지상의 장애물을 감지할 수 있다고 생각하는지 물어보세요.
중간 플레이 휴식 & 그룹 토론
모든 그룹이 도전 과제를 해결하기 위해 프로젝트를 실험하자마자 함께모여 간단한 대화를 나눕니다.
학생들에게 프로젝트를 보여주고 123 로봇이 무엇을 하고 있는지 설명해 달라고 한다. 학생들의 진행 상황을 확인하고 문제를 해결할 수 있는 기회입니다.
- 프로젝트에서 잘 진행된 점은 무엇이었나요?
- 프로젝트에서 어떤 어려움을 겪었습니까?
학생들이 루프를 사용하여 123 로봇이 필드에서 장애물을 반복적으로 점검할 수 있음을 이해하도록 한다.
- 123 로봇이 여러 개체를 감지하도록 루프를 사용했습니까? 그렇지 않은 경우, 학생들에게 참여 섹션에서 이야기한 [영원히] 및 [반복] 블록에 대해 상기시킨다.
- 루프를 사용하는 경우 루프를 어떻게 사용합니까? 프로젝트에서 루프를 생성하는 데 어떤 블록을 사용하고 있습니까?
- 루프의 블록 시퀀스는 123 로봇 로버의 동작에 어떤 영향을 줍니까?
- 일부 블록이 [Forever] 또는 [Repeat] 루프에 없으면 어떻게 되나요? 해당 블록이 반복됩니까?
플레이 파트 2에서 챌린지 변형을 준비하십시오:
- 장애물의 위치를 변경하면 어떻게 될까요? 이 프로젝트는 계속 진행되나요? 왜 그럴까요? 아니면 그렇지 않을까요?
파트 2 - 단계별
- 학생들에게 화성 착륙 지역의 장애물을 옮기고 프로젝트를 계속 실험할 것이라고 지시하십시오. 목표는 123 로봇이 위치가 변경되더라도 필드의 모든 장애물을 감지하도록 하는 것입니다! 루프와 [반복] 또는 [영원히] 블록에 대해 배운 내용을 사용하여 프로젝트를 업데이트합니다. 123 로봇이 이 챌린지를 완료하고 Forever 블록을 사용하여 모든 장애물을 제거하는 방법에 대한 한 가지 예는 아래 애니메이션을 참조하십시오.
동영상 파일
- 모든 개체가 감지되고 제거된 후 애니메이션이 중지되지만 [Forever] 루프는 프로젝트가 중지될 때까지 해당 루프에서 123 로봇을 영원히 실행하게 합니다.
- 학생들을 위한 모델 모델 필드 설정 및 프로젝트 테스트 방법.
-
먼저 필드의 새로운 위치에 장애물을 배치하는 방법을 보여주고 시작 지점을 선택하고 "X" 로 표시합니다.
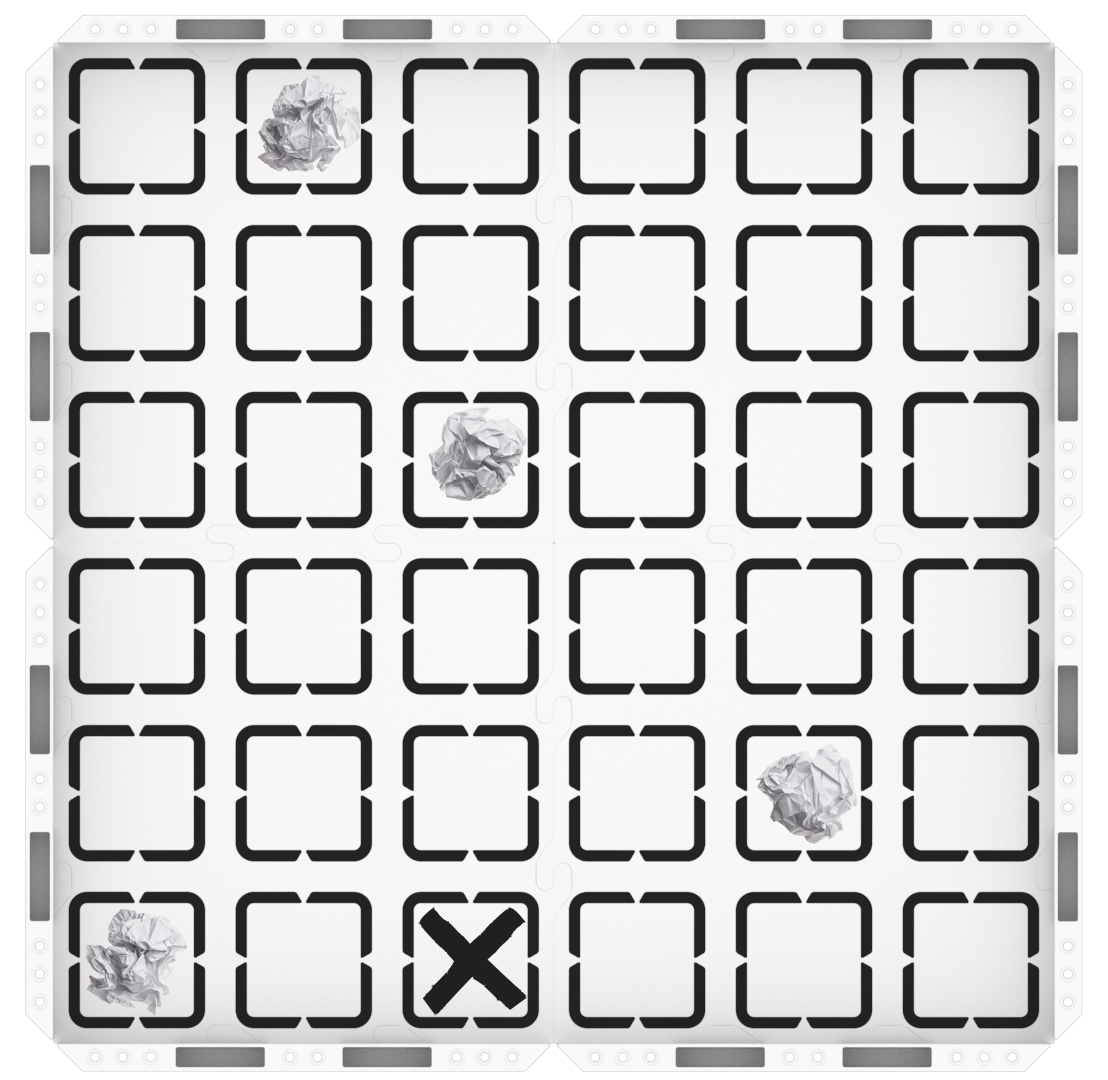
123 필드 설정 -
장애물과 123 로봇이 배치되면 VEXcode 123에서 ‘시작‘ 을 선택하여 프로젝트를 테스트할 수 있습니다.
 ‘시작‘ 을
‘시작‘ 을 선택하여 프로젝트를 테스트합니다. - 학생들에게 123 로봇을 멈추려면 도구 모음에서 "중지" 버튼을 선택해야 함을 상기시킨다.
- 이 도전에 대한 많은 가능한 해결책이 있습니다. 다음은 참조할 수 있는 한 가지 예입니다.
가능한 해결책 -
-
- 퍼실리테이트 학생들이 자신의 프로젝트를 테스트할 때 학생들과의 대화를 촉진한다.
- 학생들이 123 로봇이 현장의 모든 장애물을 감지하기 위해 코드 섹션을 반복하는 데 도움이 필요한 경우, 참여 섹션에서 이야기한 대로 [반복] 블록 또는 [영원히] 블록을 사용하고 프로젝트에서 사용하는 방법을 보여줄 것을 제안합니다. 아래 그림과 같이 전체 프로젝트가 C 블록 안에 있는지 확인하도록 권장합니다.
 [Forever] 블록
[Forever] 블록 추가 - 학생들이 프로젝트를 만들었지만 모든 물체를 감지하지 못하는 경우 회전 각도를 실험하도록 권장하고 60도, 90도, 120도 등 실험할 수 있도록 다음 회전 각도를 제공합니다. 회전 각도는 123 로봇의 움직임에 어떤 영향을 줍니까?
 회전 각도
회전 각도 변경 학생들이 프로젝트를 반복하고 테스트하면서 생각을 공유할 수 있도록 프로젝트를 구축하면서 추가 토론에 참여시킨다.
- 프로젝트에서 123 로봇이 가장 먼저 감지하는 장애물은 무엇입니까?
- 123 로봇은 장애물을 감지한 후 무엇을 합니까? 이 작업을 수행하기 위해 어떤 블록을 사용했습니까?
- 123 로봇이 제거된 후 다음 장애물로 이동하는 데 사용한 블록은 무엇입니까?
- 123 로봇으로 착륙 구역 전체를 지우는 프로젝트는 어떻게 진행되나요?
- 학생들에게 시험을 위해 같은 지점에서 시작하도록 상기시킨다. 그들은 장애물의 위치라는 하나의 변수만 변경하려고 합니다.
-
또한, 학생들이 첫 번째 장애물에 직면한 123 로봇의 눈 센서로 시작하도록 상기시키십시오. 이를 통해 123 로봇은 첫 번째 장애물로 빠르게 이동할 수 있으며 학생들이 프로젝트를 통해 즉각적인 성공을 거둘 수 있습니다.
눈 센서가 물체를 향함
-
- 학생들에게도전 기간 동안 자신의 프로젝트가 어떻게 바뀌었는지 생각해 보라고 한다.
- 연구실 시작부터 지금까지 프로젝트가 어떻게 변화했습니까?
- 더 잘 작동하기 위해 프로젝트에서 무엇을 변경했습니까?
- 어떤 변화로 인해 성공을 거두지 못했습니까? 어떻게 해결하셨나요?